基于时空特征融合的机械臂充电插拔主动柔顺控制方法与流程
- 国知局
- 2024-09-11 14:36:34
本发明属于充电桩,具体涉及基于时空特征融合的机械臂充电插拔主动柔顺控制方法。
背景技术:
1、随着新能源汽车战略的大力推广,电动汽车的普及为智能电网带来新的发展机遇。随着智能驾驶和快充技术的进步,自动化充电将成为趋势,然而,电动汽车充电插拔存在机械臂接触力过大、控制精度低、插拔耗时长等问题。因此迫切需要设计机械臂充电插拔主动柔顺控制技术,保证高效精确的插拔,同时延长插口和充电枪的使用寿命。
2、申请号为202211386259.5的专利提供一种位置偏移补偿系统及其控制方法、机器人充电系统,包括两个驱动杆件、传感器以及柔性补偿机构;其次,利用传感器监测充电枪空间特征,判断其是否对其插口;最后,柔性补偿机构根据充电枪空间特征进行位移补偿。
3、上述方法仅考虑了充电枪插拔的空间分布特征,插拔控制的精度低,影响了充电枪和车辆之间的连接效果和充电安全性,其未考虑在插口搜索训练模型中引入尝试插拔过程中偏差值的时间分布特征以及空间分布特征,使得插口搜索模型训练的收敛准确性差,插拔控制精度低。
4、申请号为201810494356.3的专利提供一种电动汽车直流充电枪插拔力的自动检测装置及方法,包括浮动锁止机构、充电枪夹具和充电机构;装置能够随目标的浮动而浮动。
5、上述方法缺乏插口搜索模型的更新反馈,导致插拔尝试次数过多,增加了充电枪的磨损,同时延后了车辆充电时间,其仅采用单次尝试数据进行损失函数更新,未考虑基于各次尝试的贡献度计算各次尝试对应的损失函数以优化插口搜索模型参数,使得模型收敛速度慢,插拔控制的耗时长。
技术实现思路
1、为了解决上述现有技术中存在的问题,提供了基于时空特征融合的机械臂充电插拔主动柔顺控制方法。
2、本发明解决其技术问题所采用的技术方案是:
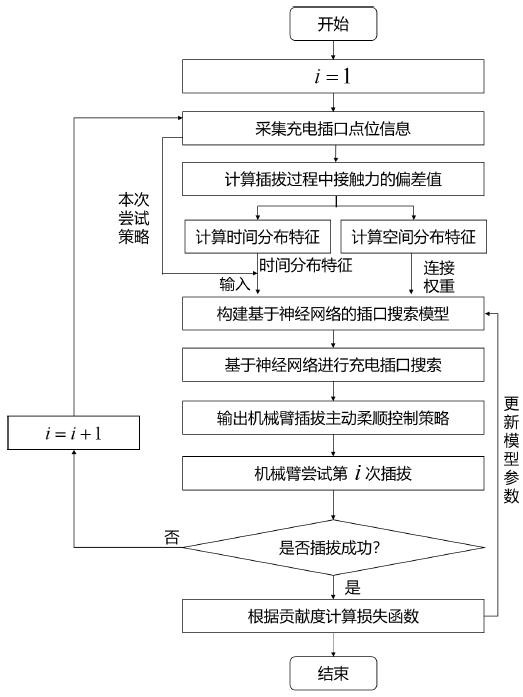
3、本技术方案提出了基于时空特征融合的机械臂充电插拔主动柔顺控制方法,包括以下步骤:
4、s1:通过传感器采集充电插口的点位信息,基于机械臂与充电插口接触力偏差值,计算时间和空间分布特征;
5、s2:构建基于神经网络的插口搜索模型,在神经网络中引入若干次尝试插拔过程中偏差值的演进,以及各点位偏差值的空间分布特征;
6、s3:根据尝试插拔阶段中,各次尝试与最后成功插拔时的充电枪位置,基于各次尝试的贡献度,计算各次尝试对应的损失函数,基于损失函数,进行插口搜索模型参数的优化;
7、s4:基于优化后的插口搜索模型,进行充电插口搜索,输出机械臂拔插主动柔顺控制策略。
8、优选的,所述s1中,时间和空间分布特征计算方法包括以下步骤:
9、根据传感器采集到的充电插口与插头的实际接触力与期望接触力,计算本次插拔过程中接触力的偏差值,第 j个传感器点位采集到的充电插口与插头的实际接触力与期望接触力的偏差值,公式如下:
10、 (1);
11、式中,为第 i次尝试插拔第 j个传感器点位采集到的实际接触力,为第 i次尝试插拔第 j个传感器点位采集到的期望接触力;
12、计算机械臂的时间分布特征,将当前偏差值与上一次尝试插拔过程中接触力的偏差值做差,公式如下:
13、 (2);
14、式中,为机械臂在第 i-1次插入充电口时第 j个传感器点位采集到的实际接触力与期望接触力的偏差值;
15、计算机械臂的空间分布特征,包括最大偏差值的点位信息、正向偏差点位、负向偏差点位信息,公式如下:
16、 (3);
17、式中, j为部署的传感器点位总数, u为空间分布特征向量,为正向偏差点位集合,为负向偏差点位集合。
18、优选的,所述s2中,插口搜索模型构建方法包括以下步骤:
19、插口搜索模型输入层神经元为,本次尝试插拔过程中机械臂插拔主动柔顺控制策略,及各点位接触力偏差值的时间分布特征矩阵,基于偏差值空间分布特征 u构建神经元的连接权重,输出层神经元为机械臂插拔主动柔顺控制策略,公式如下:
20、 (4);
21、式中,为输入层与隐藏层间传递函数,为隐藏层与输出层间传递函数,为输入层矩阵连接函数;
22、为考虑空间分布特征后输入层与隐藏层间的连接权重矩阵,为考虑空间分布特征后隐藏层与输出层间的连接权重矩阵, b为隐藏层阈值矩阵, c为输出层阈值矩阵。
23、优选的,所述s3中,插口搜索模型的优化方法包括以下步骤:
24、通过比较每次尝试与最终成功插拔时充电枪位置之间的位置偏差,以及各次尝试的贡献度,计算各次尝试对应的损失函数,公式如下:
25、 (5);
26、式中, k为预设的权重参数,为第 i次尝试与最终成功插拔时充电枪位置之间的位置偏差,为第 i次尝试的贡献度;
27、其中,第 i次尝试与最终成功插拔时充电枪位置之间的位置偏差越小,贡献度越大,损失函数越小;
28、基于各次尝试差异化贡献度的损失函数,通过梯度下降算法,优化插口搜索模型的参数,公式如下:
29、 (6);
30、式中,和分别表示更新前后的模型参数,是学习率,表示对模型参数的梯度。
31、优选的,包括:
32、点位信息采集模块,负责采集充电插口的接触力、点位信息,并将其传输到历史数据存储模块进行存储;
33、历史数据存储模块,负责存储并向贡献度计算模块传输位置信息数据;
34、贡献度计算模块,负责根据尝试插拔时间、尝试次数的信息计算贡献度,并将差异化贡献度输送到损失函数计算模块;
35、损失函数计算模块,负责根据贡献度及每次尝试与最终成功插拔时充电枪位置之间的位置偏差计算损失函数;
36、时间分布特征分析模块,负责根据当前偏差值与上一次尝试插拔过程中接触力的偏差值分析时间分布特征;
37、空间分布特征分析模块,负责提取最大偏差值及点位信息、正向偏差点位、负向偏差点位信息,构建插口搜索模型的连接权重;
38、尝试插拔策略存储模块,负责存储插口搜索模型输出的尝试插拔策略;
39、插拔动作模块,负责根据尝试插拔策略生成机械臂插拔动作,指导充电机械臂行为。
40、与现有技术相比,本发明具有以下优点:
41、本技术通过分析基于机械臂与充电插口接触力偏差值的时空分布特征,构建基于神经网络的插口搜索模型,通过在网络中引入两次尝试插拔过程中偏差值的演进以及各点位偏差值的空间分布特征,可有效提升插口搜索模型训练的准确性,增加了插拔控制的精度。
42、本技术根据尝试插拔阶段中各次尝试与最后成功插拔时的充电枪位置,基于各次尝试的贡献度,计算各次尝试对应的损失函数,基于各次尝试差异化贡献度的损失函数,进行插口搜索模型参数的优化,提升模型收敛速度,减少了插拔控制的耗时,有效提高了充电枪和车辆之间的连接效果和充电安全性,从而提高了车辆充电服务质量。
本文地址:https://www.jishuxx.com/zhuanli/20240911/291562.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。