一种用于倾转旋翼构型的倾转机构测试平台及控制方法
- 国知局
- 2024-08-01 06:19:31
本发明涉及测试技术、机械设计及其自动化、倾转旋翼机技术交叉领域,特别涉及一种用于倾转旋翼构型的倾转机构测试平台及控制方法。
背景技术:
1、倾转旋翼机是一种兼具直升机和固定翼飞机飞行能力的飞行器,直升机和固定翼飞机两种飞行模式的转换可通过安装在机翼端部的可在水平与垂直位置之间转动的旋翼实现。当旋翼桨盘处于垂直位置时,倾转旋翼机的构型类似于横列式直升机,可垂直起降、悬停和小速度前、后、侧飞;当旋翼桨盘处于水平位置时,倾转旋翼机相当于带有螺旋桨的固定翼飞机,能比直升机更快地飞行。其中,倾转机构作为倾转旋翼无人机的核心部件,很大程度上决定了飞行模式转换的稳定性和飞行安全性。
2、真实倾转过程的测试无论是在风洞中还是样机试飞都会耗费大量的人力物力,至于有人驾驶的倾转旋翼机,在飞行过程中可能因为倾转机构和旋翼/机翼动力学耦合等气弹问题,驾驶员还可能面临机体颤振带来的失控,从而造成驾驶员和地面人员的伤亡。为了改善这种情况,倾转机构的选型和倾转策略也就变得至关重要。目前国内外应用于实际轻型倾转旋翼机的倾转机构主要有舵机齿轮传动倾转机构,舵机直驱倾转机构,链条传动式倾转机构。但是这几种传动方式均有各自的不足之处:舵机齿轮传动倾转机构虽然输出扭矩大,但齿轮啮合精度要求高并且存在啮合间隙;舵机直驱倾转机构对于驱动力矩的要求很大;链条传动式倾转机构对于装配的精度要求高,并且存在冲击振动、噪声大等问题。
技术实现思路
1、针对于上述倾转旋翼机技术的不足,本发明的目的在于提供一种用于倾转旋翼构型的倾转机构测试平台,通过电机来调整倾转旋翼机此刻的偏航、俯仰、滚转姿态,结构简单紧凑,仅通过三个方向的电机即可对任意姿态的倾转旋翼机进行实验。同时还提供了一种倾转旋翼机姿态的控制方法,基于步进电机来驱动的连杆机构和通过带有滑槽的支座来控制姿态的倾转机构,能够满足电动倾转旋翼机转换飞行模式的要求,响应速度快,行程可调节,可控性好。并且通过基于带有滑槽的支座的姿态控制系统达到直升机和固定翼模式下的自锁要求,从而提供稳定的驱动效果。
2、本技术通过以下技术方案实现上述效果:
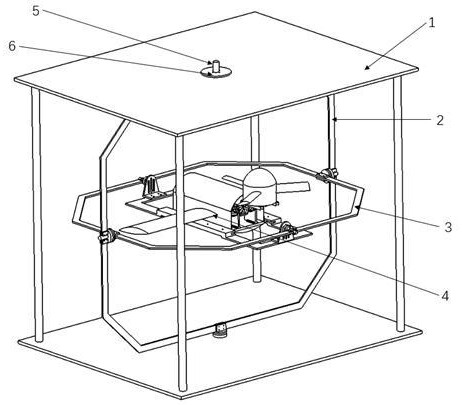
3、一种用于倾转旋翼构型的倾转机构测试平台,所述测试平台包括外部框架、中部框架、内部框架、带有机翼和旋翼系统的半展长倾转旋翼机倾转机构;其中,带有机翼和旋翼系统的半展长倾转旋翼机倾转机构包含旋翼短舱外壳、步进电机、驱动系统、姿态控制系统、执行系统,其中,所述驱动系统与姿态控制系统通过拉杆连接;所述驱动系统、姿态控制系统以及执行系统共同连接并安装于旋翼短舱内部。
4、进一步的,所述外部框架包含支撑架、电机支座、外部框架电机、外框架轴承座、外框架连接件、外框架平面轴承、外框架轴承、外八边形框架、连接销钉;其中,所述电机支座固定在所述支撑架外侧顶部,所述外框架轴承座固定在所述支撑架上下两端的内侧;
5、所述外框架连接件安装在所述外八边形框架上下两端的中间位置,并伸出一根短轴;
6、所述外框架轴承安装在所述外框架轴承座内部紧密配合,同时所述外框架连接件伸出的短轴与轴承连接并紧密配合;
7、所述外框架平面轴承与所述外框架连接件伸出的短轴连接并紧密配合;
8、所述外部框架电机固定在所述电机支座上,并且电机的输出轴连接所述外框架连接件的短轴。
9、进一步的,所述中部框架包含中框架电机、中框架轴承座、中框架轴承、中框架平面轴承、中框架连接件、中八边形框架;
10、所述中框架轴承座安装在所述外八边形框架左右两端的中间位置,所述中框架轴承安装在所述中框架轴承座内部紧密配合,同时所述中框架连接件伸出的短轴与轴承连接并紧密配合;
11、所述中框架连接件安装在所述中八边形框架左右两端的中间位置,并伸出一根短轴;
12、所述中框架平面轴承与所述中框架连接件伸出的短轴连接并紧密配合,所述中框架电机的输出轴连接所述中框架连接件的短轴。
13、进一步的,所述内部框架包含内部框架电机、内框架轴承座、内框架轴承、内框架平面轴承、内框架连接件、高度调节台、测试平台支撑件、紧固销钉;
14、所述测试平台支撑件与所述带有机翼和旋翼系统的半展长倾转旋翼机倾转机构固定连接,所述高度调节台与所述测试平台支撑件固定连接,中间预设有一条供紧固销钉上下移动的滑槽;
15、所述内框架轴承座安装在所述中八边形框架前后两端的中间位置,并伸出一根短轴;
16、所述内框架轴承安装在所述内框架轴承座内部并紧密配合,同时所述内框架连接件伸出的短轴与轴承连接并紧密配合;
17、所述内框架连接件与所述高度调节台和所述内框架轴承座相连,并伸出一根短轴;
18、所述内框架平面轴承与所述内框架连接件伸出的短轴连接并紧密配合;所述内部框架电机的输出轴连接所述内框架连接件的短轴。
19、进一步的,所述旋翼短舱外壳为箱型结构,外部左右两侧预设有用于安装于测试平台的固定台,开口位置上部固定一横梁,下部布置一支撑板贯穿整个短舱内部;所述驱动系统、姿态控制系统、执行系统之间经连接后固定在所述旋翼短舱外壳内部。
20、进一步的,所述步进电机通过定位螺母安装在所述旋翼短舱外壳内部支撑板的后端部。
21、进一步的,所述驱动系统包含联轴器、丝杆、丝杆附属定位块及拉杆和固定支座组成;
22、所述丝杆通过联轴器与所述步进电机的短轴相连,并由所述步进电机驱动转动;
23、所述丝杆附属定位块与所述丝杆配合,丝杆被步进电机带动转动的同时,带动丝杆附属定位块在水平方向前后进动;
24、所述拉杆与所述丝杆附属定位块铰接,所述丝杆附属定位块在水平方向前后进动的同时,带动拉杆进行运动;
25、所述固定支座固定在所述旋翼短舱外壳中支撑板上。
26、进一步的,所述姿态控制系统,由弧形滑槽支座,导轨附属定位销钉,支座固定杆组成;
27、所述弧形滑槽支座固定在所述旋翼短舱外壳中支撑板上,弧形滑槽支座的下部贯穿一定位孔;
28、所述导轨附属定位销钉放置在所述弧形滑槽支座的滑槽中,可在滑槽内滑动,并在外侧与所述拉杆铰接;
29、所述支座固定杆穿过所述定位孔,并与所述旋翼短舱外壳固定。
30、进一步的,所述执行系统包含支撑杆、后支点大臂、后支点小臂、小连杆、前支点大臂、前支点小臂、限位杆、旋翼桨盘及旋翼系统和若干螺栓;
31、所述支撑杆下部与所述支座连杆铰接,上部与所述旋翼短舱外壳上部横梁铰接;所述后支点大臂上部与所述旋翼短舱外壳上部横梁铰接,下部与所述导轨附属定位销钉内侧内部铰接,所述后支点大臂被定位且运动轨迹为绕上部横梁定轴转动的弧线;
32、所述后支点小臂下部与所述导轨附属定位销钉内侧外部铰接,上部与旋翼桨盘支撑件后支点铰接,所述后支点小臂被定位且运动轨迹为绕所述导轨附属定位销钉定轴转动的弧线;
33、所述小连杆左侧与所述后支点大臂中部铰接,右侧与所述螺栓铰接,所述小连杆被定位且运动轨迹为绕左侧铰接点的定轴转动的弧线;
34、所述前支点大臂左侧与所述连接小连杆右侧的螺栓铰接,中侧与所述后支点小臂铰接,右侧与所述前支点小臂铰接,所述前支点大臂被定位且运动轨迹为绕左侧铰接点的定轴转动的弧线;
35、所述前支点小臂下部与所述连接前支点大臂右侧的螺栓铰接,上部与旋翼桨盘支撑件中部铰接,所述前支点小臂被定位且运动轨迹为绕下部铰接点的定轴转动的弧线;
36、所述限位杆下部与所述支座固定杆铰接,上部与所述连接小连杆右侧的螺栓铰接,此时,所述限位杆被定位且运动轨迹为绕支座连杆定轴转动的弧线;
37、所述旋翼桨盘支撑件在每根构件被定位后,依靠左侧和中侧的铰接点被定位,由执行系统带动,所述旋翼系统依靠每侧各两个的螺栓固定在两侧的旋翼桨盘支撑件上。
38、基于上述倾转机构测试平台,本技术提供一种基于调整电机转动角度的倾转机构测试平台的控制方法,所述控制方法由电机驱动实现。
39、当所述测试平台被固定,实验用半展长倾转旋翼机固定在所述测试平台支撑架后,通过控制所述与外部框架相连的电机运动,进而控制倾转旋翼机的偏航角度;控制所述与中部框架相连的电机运动,进而控制倾转旋翼机的俯仰角度;控制所述与内部框架相连的电机运动,进而控制倾转旋翼机的滚转角度,三个方向的电机即可做到使倾转旋翼机在任何姿态下的运动。
40、基于上述带有机翼的半展长倾转旋翼机的倾转机构,本技术提供一种基于步进电机正(反)转的倾转旋翼机姿态控制方法,所述控制方法由驱动系统,姿态控制系统和执行系统协调实现。
41、进一步地,所述姿态控制方法包含两种模式:
42、所述电动轻型倾转旋翼机在垂直起降模式(水平前飞模式)与水平前飞模式(垂直起降模式)间转换时,依靠所述步进电机作来驱动,通过控制步进电机的正转(反转),进而控制驱动系统运动,此时,所述驱动系统中的丝杆正转(反转)带动所述丝杆上附属定位块向后(前)进动,所述丝杆上附属定位块进动的同时,带动连杆运动,连杆被驱动后,带动所述姿态控制系统运动;此时,所述姿态控制系统中导轨附属定位销钉在弧形滑槽支座中向下(上)滑动,带动所述执行系统运动;此时,所述执行系统后支点大臂开始绕所述旋翼短舱外壳上部横梁向下(上)旋转,带动与所述后支点大臂中部铰接的所述小连杆左侧铰接点向下(上)旋转,同时,带动所述限位杆绕所述支座连杆向上(下)旋转,所述后支点大臂和限位杆的旋转带动所述小连杆右侧铰支点螺栓向上(下)旋转;此时,在所述小连杆右侧铰支点螺栓的带动下,所述前支点大臂开始绕着所述螺栓进行向下(上)转动,同时,在所述导轨附属定位销钉和前支点大臂的运动下,带动所述后支点小臂绕所述导轨附属定位销钉向上(下)旋转;在所述前支点大臂的运动下,开始带动所述前支点小臂开始绕所述前支点大臂与前支点小臂铰接的螺栓向下(上)转动;上述构件的运动最终驱动旋翼桨盘支撑件由水平姿态(竖直姿态)转变为竖直姿态(水平姿态),进而最终使倾转旋翼机进入水平前飞姿态(垂直起降姿态)。
43、与现有技术相比,本发明有以下优点:
44、1.本发明所述的一种用于倾转旋翼构型的倾转机构测试平台及控制方法,通过电机驱动飞行测试平台三个方向的框架旋转,可以模拟出倾转旋翼机在任意姿态下的飞行模式,安全可靠地进行倾转机构的收放测试。
45、2.本发明所述的一种用于倾转旋翼构型的倾转机构测试平台及控制方法,可以根据实际需要将测试平台固定在任何场景之下,包括风洞,水箱等实验场景,进而获得更多环境下倾转旋翼机倾转过程中的实验数据。
46、3.本发明所述的一种用于倾转旋翼构型的倾转机构测试平台及控制方法,其中的倾转机构借助连杆机构来实现倾转运动,可以将旋翼带来的拉力合理分配在每根构件上,很好的缓解了构件的复杂的交变空气动力下的疲劳问题。
47、4.本发明所述的一种用于倾转旋翼构型的倾转机构测试平台及控制方法,借助丝杆以及姿态控制系统的自锁特性,可以做到倾转旋翼机在进入垂直起降模式和水平前飞模式下的拉力稳定,缓解了在倾转过程中的气动弹性发散问题。
48、5.本发明所述的倾转机构提供了一种新型的倾转策略,为未来中小型倾转旋翼机的倾转方案提供了一种新思路。
本文地址:https://www.jishuxx.com/zhuanli/20240722/223302.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。