往返式水下探测滑翔机的制作方法
- 国知局
- 2024-08-01 06:22:18
本发明涉及一种往返式水下探测滑翔机。
背景技术:
1、水下探测滑翔机用于在海域中执行探测任务;现有的探测任务按工作海域地点来划分,分为两种:一、在定点海洋区域上下往复多次探测;二、在预定海洋片区呈波浪轨迹巡航探测;但现有的滑翔机不能同时兼备前述两点功能。
技术实现思路
1、本发明的目的是提供一种往返式水下探测滑翔机,解决上述现有技术问题中的一个或多个。
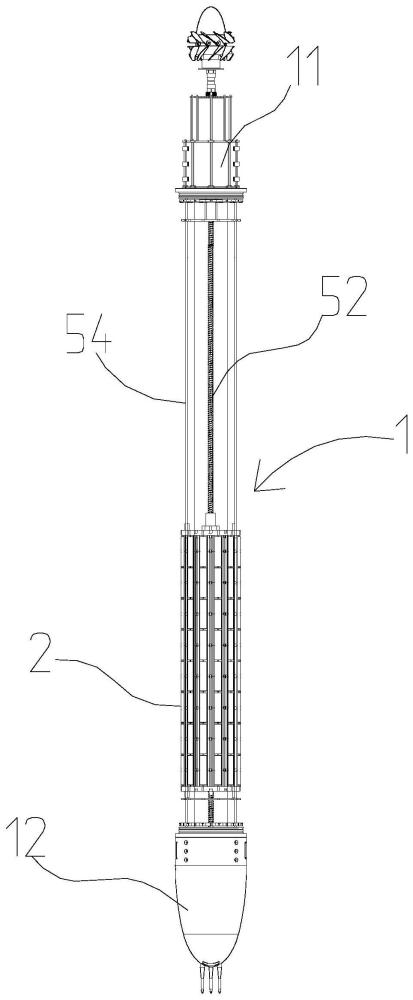
2、根据本发明的一个方面,提供了一种往返式水下探测滑翔机,其包括机体,设有机尾和机头;
3、主轴,沿着机尾至机头方向延伸设置在机体内;
4、蓄电池模块,可移动地设在主轴,蓄电池模块设置成可沿主轴的轴向移动,且蓄电池模块的质心与主轴的虚拟中心轴线重合;
5、太阳能电池板,设在机体的外周侧,与蓄电池模块电连接;
6、第一位移驱动结构,设置成用于驱动蓄电池模块沿主轴的轴向移动;
7、侧向喷水推进结构,设置在机头上,且侧向喷水推进结构的喷水推力方向设置成沿机头的径向;
8、浮力控制结构,设置在机体,浮力控制结构设置成用于控制往返式水下探测滑翔机的下潜或上浮;以及
9、控制系统,与第一位移驱动结构电控连接,当浮力控制结构控制往返式水下探测滑翔机下潜时,控制系统控制第一位移驱动结构驱动蓄电池模块朝机头移动;当浮力控制结构控制往返式水下探测滑翔机上浮时,控制系统控制第一位移驱动结构驱动蓄电池模块朝机尾移动。
10、工作过程,将探测仪器设置在机头位置,当需要对固定的预设位置进行多次往复潜浮探测时,控制系统控制浮力控制结构减小浮力使得返式水下探测滑翔机下潜,同时控制系统控制第一位移驱动结构驱动蓄电池模块朝机头移动,使得重心移动到机头位置,进而使得姿态调整为机头朝下,即在下潜过程中机头是首先迎着海水的,那么探测仪器避开了下潜时产生的尾流的影响,减少了测量干扰因素,提高了测量精度;当下潜到预设深度后,控制系统控制浮力控制结构增加浮力使得返式水下探测滑翔机上浮,同时控制系统控制第一位移驱动结构驱动蓄电池模块朝机尾移动,使得重心移动到机尾位置,进而使得姿态调整为机头朝上,即在上浮过程中机头是首先迎着海水的,那么探测仪器避开了上浮时产生的尾流的影响,减少了测量干扰因素,提高了测量精度;同时,由于太阳能电池板能够根据实际需要为蓄电池模块补充电能,使得本发明在无需人工补充能量的前提下,实现了多次定点往返探测的功能。当需要对预设海洋片区进行波浪式巡航潜浮探测时,控制系统控制浮力控制结构减小浮力使得返式水下探测滑翔机下潜,同时控制系统控制第一位移驱动结构驱动蓄电池模块朝机头移动,使得重心移动到机头位置,进而使得姿态调整为机头朝下,同时控制系统控制侧向喷水推进结构沿机头的径向外喷水,获得反推力,以使得机体倾斜下潜;当下潜到预设深度后,控制系统控制浮力控制结构增加浮力使得返式水下探测滑翔机上浮,同时控制系统控制第一位移驱动结构驱动蓄电池模块朝机尾移动,使得重心移动到机尾位置,进而使得姿态调整为机头朝上,同时控制系统控制侧向喷水推进结构沿机头的径向外喷水,获得反推力,以使得机体倾斜上浮,如此循环,在预定的海洋片区呈波浪轨迹巡航探测。使得本发明即具备定点上下往复多次探测的能力,又具备在预定海洋片区呈波浪轨迹巡航探测的功能。
11、在一些实施方式中,蓄电池模块包括电池安装架以及多个电池芯体,其中,电池安装架设置成环形筒状,电池安装架套设在主轴上,电池安装架上均布有多个安装孔位,多个电池芯体一一分布安装在安装孔位内。
12、在一些实施方式中,第一位移驱动结构包括第一驱动电机、第一丝杆、第一螺母轴套、以及第一导向轴;其中,第一导向轴设置成与主轴平行,沿着机尾至机头方向延伸,电池安装架滑套地设置在第一导向轴上;第一丝杆设置成与主轴平行,沿着机尾至机头方向延伸,第一螺母轴套固定设置在电池安装架上,第一丝杆与第一螺母轴套螺纹连接配套,第一驱动电机设置在机体上,第一驱动电机与第一丝杆驱动连接。
13、在一些实施方式中,电池安装架面对主轴的内侧壁上设置有滚轮,滚轮与主轴的外周滚动配合。
14、这样,使得电池安装架更加流畅地在主轴上移动。
15、在一些实施方式中,机头上设有整流罩,侧向喷水推进结构包括水泵结构、第一方向喷水道以及第二方向喷水道,水泵结构设置成用于向第一方向喷水道和第二方向喷水道泵水;其中,第一方向喷水道和第二方向喷水道均开设在整流罩上,且第一方向喷水道和第二方向喷水道关于主轴的虚拟中心轴线对称设置。
16、这样,由于第一方向喷水道和第二方向喷水道关于主轴的虚拟中心轴线对称设置,侧向喷水推进结构可以在左右方向上对机头进行偏转调整。
17、在一些实施方式中,整流罩与外界贯通连接,水泵结构设置在整流罩内;机体内还设置有倾角姿态传感器,倾角姿态传感器设置成用于感知机体相对于重力方向的倾斜角度,倾角姿态传感器和水泵结构均与控制系统电控连接,以使得控制系统能够根据倾角姿态传感器测得的数据调控第一方向喷水道和或/第二方向喷水道的喷射工作状态。
18、这样,在倾角姿态传感器和控制系统的配合下,使得本发明可以更加精确地在预设海洋区域内巡航。
19、在一些实施方式中,侧向喷水推进结构还包括第三方向喷水道和第四方向喷水道,第三方向喷水道和第四方向喷水道关于主轴的虚拟中心轴线对称设置,且第一方向喷水道、第二方向喷水道、第三方向喷水道以及第四方向喷水道围绕主轴的虚拟中心轴线角度均等地开设在整流罩。
20、这样,由于第一方向喷水道、第二方向喷水道、第三方向喷水道以及第四方向喷水道围绕主轴的虚拟中心轴线角度均等地开设在整流罩,侧向喷水推进结构可以在前后左右方向上对机头进行偏转调整。
技术特征:1.往返式水下探测滑翔机,其特征在于,包括:
2.根据权利要求1所述的往返式水下探测滑翔机,其特征在于,所述蓄电池模块包括电池安装架以及多个电池芯体,其中,所述电池安装架设置成环形筒状,所述电池安装架套设在所述主轴上,所述电池安装架上均布有多个安装孔位,多个所述电池芯体一一分布安装在所述安装孔位内。
3.根据权利要求2所述的往返式水下探测滑翔机,其特征在于,所述第一位移驱动结构包括第一驱动电机、第一丝杆、第一螺母轴套、以及第一导向轴;其中,所述第一导向轴设置成与所述主轴平行,沿着所述机尾至所述机头方向延伸,所述电池安装架滑套地设置在所述第一导向轴上;所述第一丝杆设置成与所述主轴平行,沿着所述机尾至所述机头方向延伸,所述第一螺母轴套固定设置在所述电池安装架上,所述第一丝杆与所述第一螺母轴套螺纹连接配套,所述第一驱动电机设置在所述机体上,所述第一驱动电机与所述第一丝杆驱动连接。
4.根据权利要求3所述的往返式水下探测滑翔机,其特征在于,所述电池安装架面对所述主轴的内侧壁上设置有滚轮,所述滚轮与所述主轴的外周滚动配合。
5.根据权利要求1-4中任一项所述的往返式水下探测滑翔机,其特征在于,所述机头上设有整流罩,所述侧向喷水推进结构包括水泵结构、第一方向喷水道以及第二方向喷水道,所述水泵结构设置成用于向所述第一方向喷水道和所述第二方向喷水道泵水;其中,所述第一方向喷水道和所述第二方向喷水道均开设在所述整流罩上,且所述第一方向喷水道和所述第二方向喷水道关于所述主轴的虚拟中心轴线对称设置。
6.根据权利要求5所述的往返式水下探测滑翔机,其特征在于,所述整流罩与外界贯通连接,所述水泵结构设置在所述整流罩内;所述机体内还设置有倾角姿态传感器,所述倾角姿态传感器设置成用于感知所述机体相对于重力方向的倾斜角度,所述倾角姿态传感器和所述水泵结构均与所述控制系统电控连接,以使得所述控制系统能够根据所述倾角姿态传感器测得的数据调控所述第一方向喷水道和或/所述第二方向喷水道的喷射工作状态。
7.根据权利要求6所述的往返式水下探测滑翔机,其特征在于,所述侧向喷水推进结构还包括第三方向喷水道和第四方向喷水道,所述第三方向喷水道和所述第四方向喷水道关于所述主轴的虚拟中心轴线对称设置,且所述第一方向喷水道、所述第二方向喷水道、所述第三方向喷水道以及所述第四方向喷水道围绕所述主轴的虚拟中心轴线角度均等地开设在所述整流罩。
技术总结本发明公开了一种往返式水下探测滑翔机,包括机体,设有机尾和机头;主轴,沿着机尾至机头方向延伸设置在机体内;蓄电池模块,可移动地设在主轴,蓄电池模块设置成可沿主轴的轴向移动,且蓄电池模块的质心与主轴的虚拟中心轴线重合;太阳能电池板,设在机体的外周侧,与蓄电池模块电连接;第一位移驱动结构,设置成用于驱动蓄电池模块沿主轴的轴向移动;侧向喷水推进结构,设置在机头上,且侧向喷水推进结构的喷水推力方向设置成沿机头的径向;浮力控制结构;以及控制系统。本发明即具备定点上下往复多次探测的能力,又具备在预定海洋片区呈波浪轨迹巡航探测的功能。技术研发人员:尚晓东,韩广辉,樊江燕,梁长荣,尚琛晶,戚永锋受保护的技术使用者:广州欧纳电子科技有限公司技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/223535.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表