环轨式船体清洗平台
- 国知局
- 2024-08-01 06:22:19
本发明环轨式船体清洗平台,涉及船体清洗,尤其涉及一种环轨式船体清洗平台。
背景技术:
1、现有的船体外壳清洗方式主要分为水下清洗和船坞内清洗,通常水下清洗的方式成本更低也更为常用。水下清洗又分为人工和水下清洗机器人两种方式。人工清洗效率低,也需要消耗大量人力,同时对工作人员的身体健康产生不良影响;机器人的清洗方式则面临着快速移动和定位精准两者冲突的矛盾,同时由于清洗机器人体量的关系,清洗机器人的单次清洗范围也受到限制。
2、针对上述现有技术中所存在的问题,研究设计一种新型的环轨式船体清洗平台,从而克服现有技术中所存在的问题是十分必要的。
技术实现思路
1、根据上述现有技术提出的人工清洗效率低、人力消耗大、易造成清洗人员身体健康问题,以及机器人清洗单次清洗范围受限等技术问题,而提供一种环轨式船体清洗平台。本发明主要利用环形轨道的松紧和位置以及利用驱动绳的长度,控制清洗工具的位置和移动速度,从而起到加快船体清洗速度的效果。
2、本发明采用的技术手段如下:
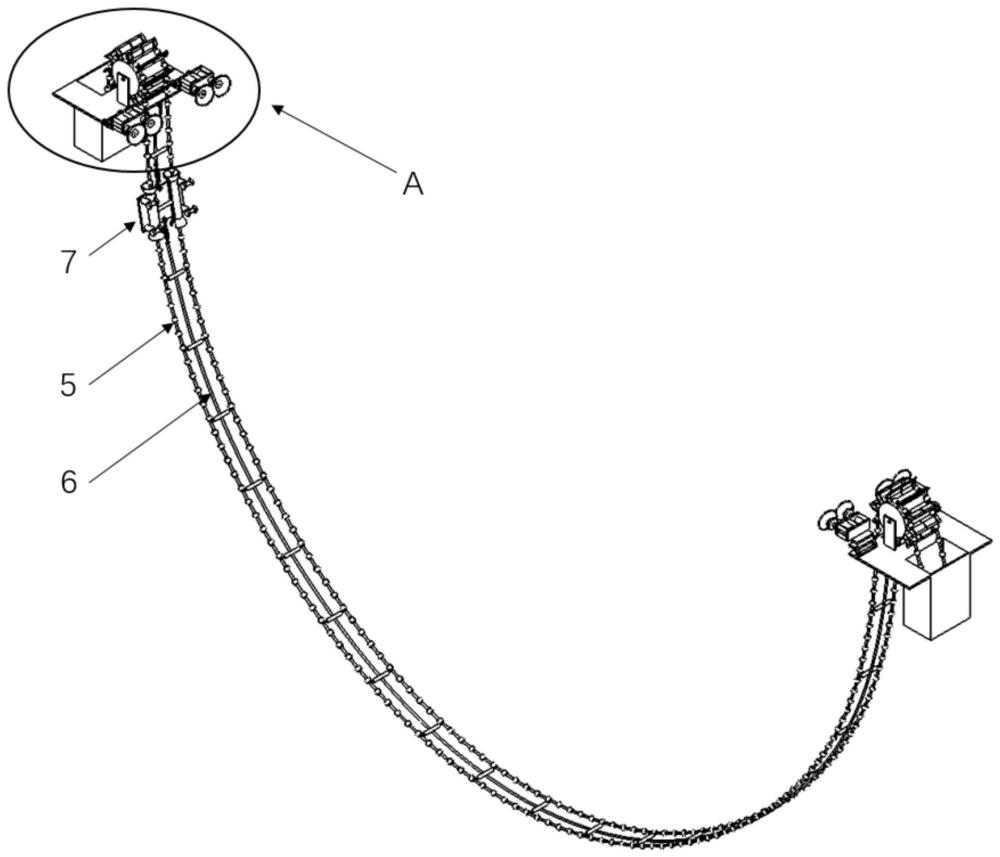
3、一种环轨式船体清洗平台包括:爪轮、驱动滚轮、吸附行走机构、浮体平台、环形轨道、驱动绳和搭载平台;
4、进一步地,浮体平台为两个,分别设置在船体两侧,是用于承担设备重力的平台;
5、进一步地,每个浮体平台内侧设置有两个吸附行走机构,上部设置有一个爪轮,爪轮与动力机构相连接;内侧还设置有一个驱动滚轮;
6、进一步地,环形轨道连接装于两个爪轮之间,爪轮外部的环形轨道置于浮体平台内收纳;
7、进一步地,搭载平台装于环形轨道上,其两端分别连接一根驱动绳,两根驱动绳的另一端与驱动滚轮相连接;驱动滚轮通过驱动绳驱动搭载平台沿着环形轨道的轨迹沿着船体左右方向移动;
8、进一步地,搭载平台上装配清洗单元。
9、进一步地,爪轮上包含多个轮叶,每个轮叶上开设有卡口,通过卡口与环形轨道配合来驱动环形轨道动作。
10、进一步地,驱动滚轮设置于爪轮的前端或下方,用于连接驱动绳,并防止驱动绳和环形轨道发生交叉缠绕。
11、进一步地,浮体平台上设置有两套吸附行走机构;
12、进一步地,每套吸附行走机构均包括:弹簧筒、吸盘和四连杆机构;
13、进一步地,四连杆机构的一端固定装于浮体平台的内侧,另一端均布装配有两个弹簧筒;
14、进一步地,两个弹簧筒的另一端各装有一个吸盘,吸盘与真空泵相连通;
15、进一步地,浮体平台通过两套吸附行走机构上吸盘的收放控制和四连杆机构的配合动作实现沿船体前后方向的移动。
16、进一步地,浮体平台中布置有收纳桶;
17、进一步地,收纳桶用于收纳超出使用长度的环形轨道。
18、进一步地,环形轨道包括:柔性绳索、浮球卡扣、浮球、保持杆和防蹭管;
19、进一步地,柔性绳索为两根,两根柔性绳索之间等距装配有若干根保持杆,用于保持两根柔性绳索并排设置;
20、进一步地,保持杆上套装有防蹭管,防蹭管可在保持杆上自由转动,用于防止设置于保持杆外部的驱动绳与船体发生剐蹭;
21、进一步地,两根柔性绳索上等距对称装有浮球;
22、进一步地,浮球通过浮球卡扣装配于柔性绳索上,并能绕浮球卡扣自由转动,用以当整体装置沿船体前后方向移动时减少环形轨道对船体的摩擦;
23、进一步地,浮球卡扣和浮球与卡口配合,实现爪轮驱动环形轨道的收放。
24、进一步地,搭载平台包括:平台、c形导管和垫高轮;
25、进一步地,平台为具有一定强度的板状结构,用于装配清洗单元;
26、进一步地,平台的内部两侧对称各装有一个用于与柔性绳索嵌套装配的c形导管;
27、进一步地,c形导管的中部为圆筒部,圆筒部的上下两端各装配有一个喇叭口部,便于引导柔性绳索和浮球卡扣穿过;
28、进一步地,两个c形导管的相对内侧设置有一条嵌通缝,用于嵌装柔性绳索,同时配合喇叭口部使搭载平台在环形轨道上移动时不被保持杆阻碍;
29、进一步地,平台的各个角部均布设置有垫高轮,垫高轮与船体相接触,用于防止搭载平台和船体发生摩擦,同时也用于加大搭载平台和船体之间的贴紧力。
30、本发明的工作过程分为两个阶段:吸附准备阶段和移动清洗阶段;
31、一、吸附准备阶段:
32、1、待清洗船舶停靠稳定后,由工作艇分别将两个浮体平台移动到船舶左舷和右舷,使吸附行走机构中的吸盘靠紧船体,此时环形轨道为放松状态;
33、2、此时左弦(左舷为例)的吸盘工作,将浮体平台吸附在船体外壳上;
34、3、左舷特制的爪轮动作,收紧环形轨道,右舷浮体平台在环形轨道拉力下到达与左舷船体平台对称位置;
35、4、右舷吸盘动作,使右舷浮体平台吸附在船体外壳上;
36、5、左舷或右舷驱动滚轮动作,收紧柔性绳索,至此吸附准备阶段结束;
37、二、移动清洗阶段:
38、6、将搭载平台沿着船体左右移动的动作称为左右移动,沿着船体前后移动的动作称为前后移动;
39、7、两舷浮体平台上特制的爪轮不动作,驱动滚轮配合动作,使搭载平台在柔性绳索的牵拉下进行左右移动;
40、8、一处清洗断面的清洗工作完成后,驱动滚轮和特制的爪轮动作,使柔性绳索和环形轨道放松;
41、9、每侧船舷的浮体平台上前后各有一组四连杆机构和吸盘;两侧船舷上前部吸盘放松,并通过四连杆机构向前移动一定角度;同时后部吸盘吸附,并通过四连杆机构向后移动移动角度。然后,前部吸盘吸附,并通过四连杆机构向后移动一定角度;同时后部吸盘放松,并通过四连杆机构向前移动一定角度。
42、10、重复动作9,环轨式清洗平台逐步从前向后移动,使搭载平台进行前后移动。
43、较现有技术相比,本发明具有以下优点:
44、1、本发明提供的环轨式船体清洗平台,提高船体清洗工具的移动速度;
45、2、本发明提供的环轨式船体清洗平台,通过吸附行走机构和环形轨道,简化了路径规划的难度;
46、3、本发明提供的环轨式船体清洗平台,可以完成自动化,节省人工成本,效率高;
47、4、本发明提供的环形轨道、驱动绳、搭载平台相结合的结构,可以使清洗平台在船底的运动兼顾快速性和准确性;
48、5、本发明提供的环形轨道结构,可以使清洗平台应用于多种形状的船底。
49、综上,应用本发明的技术方案解决了现有技术中的人工清洗效率低、人力消耗大、易造成清洗人员身体健康问题,以及机器人清洗单次清洗范围受限等问题。
技术特征:1.一种环轨式船体清洗平台,其特征在于:
2.根据权利要求1所述的环轨式船体清洗平台,其特征在于:
3.根据权利要求1所述的环轨式船体清洗平台,其特征在于:
4.根据权利要求1所述的环轨式船体清洗平台,其特征在于:
5.根据权利要求4所述的环轨式船体清洗平台,其特征在于:
6.根据权利要求1、2和5中任意一项所述的环轨式船体清洗平台,其特征在于:
7.根据权利要求1所述的环轨式船体清洗平台,其特征在于:
技术总结本发明环轨式船体清洗平台,涉及船体清洗技术领域,尤其涉及一种环轨式船体清洗平台。本发明环轨式船体清洗平台的浮体平台为两个,分别设置在船体两侧;每个浮体平台内侧设置有两个吸附行走机构,上部设置有一个爪轮,爪轮与动力机构相连接;内侧还设置有一个驱动滚轮;环形轨道连接装于两个爪轮之间,爪轮外部的环形轨道置于浮体平台内收纳;搭载平台装于环形轨道上,其两端分别连接一根驱动绳,两根驱动绳的另一端与驱动滚轮相连接;搭载平台上装配清洗单元。本发明的技术方案解决了现有技术中的人工清洗效率低、人力消耗大、易造成清洗人员身体健康问题,以及机器人清洗单次清洗范围受限等问题。技术研发人员:韩广冬,罗伟荣,孙玉清,赵世龙,王生海,刘泽平,刘东,陈海泉受保护的技术使用者:大连海事大学技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/223536.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表