一种基于测量吃水距离的大宗货船水尺计重方法与流程
- 国知局
- 2024-08-01 06:22:32
本发明涉及船舶水尺计重,具体为一种基于测量吃水距离的大宗货船水尺计重方法。
背景技术:
1、水尺计重又称固体公估,是船舶载重量统计的一种方式,这种计重方式快捷便利、成本低,更重要的是其统计的结果有一定的科学性和较好的准确性,在国际国内的航运业,除了油船外,水尺计重通常被应用在各类货船上,这种计重方式使用的广泛性不言而喻。该方式只需要工作人员观测水面线在船舶水尺的位置,根据船舶水尺的刻度获取船舶的实际吃水量,然后,将船舶装货前与装货后的水尺读数作差,通过吃水差查找相对应的排水表就可以计算出船舶的实际载重量。水尺标志一般布置在船两侧的舷、肿、艇位置,这样可以便于在观测时一一验证货船的载重量。
2、现有技术中一般通过存在通过摄像的方法对水尺计重进行检测的技术方案,例如中国发明专利(cn104943831a)公开了一种基于定点摄像法的水尺检测方法,包括:设置于定点位置上的摄像装置采集船舶的水尺视频图像;摄像装置将采集的水尺视频图像发送给图像信号接收器;图像信号接收器将接收到的水尺视频图像传送给水尺检测设备;水尺检测设备提取水尺视频图像中的水尺图像,对水尺图像的his颜色空间进行通道的二值化处理,并对经过二值化处理的水尺图像进行阈值化处理,提取出真实吃水线;然而,上述方案对水尺计重时,仅通过单个测量点确定计重结果,测量次数不够,主要依靠人员经验来决定数据的选取,使得人为的主观因素对结果影响很大,各方难以达成共识。
3、同时,现有技术中的多点测量法测量时,船舶停靠在水面上,一直受到水流波动影响,依次测量多个点水尺需要几十分钟的时间,这段时间内的浪涌将严重影响水尺观测的一致性,从而造成较大的系统误差。
4、因此,现有技术中急需一种能准确得到大宗货船水尺计重的技术方案。
技术实现思路
1、本发明要解决的技术问题是针对上述技术方案的不足,提供一种基于测量吃水距离的大宗货船水尺计重方法,用于提高水尺计重的准确度。
2、为了实现上述目的,根据本发明的一个方面,提供一种基于测量吃水距离的大宗货船水尺计重方法,包括以下步骤:
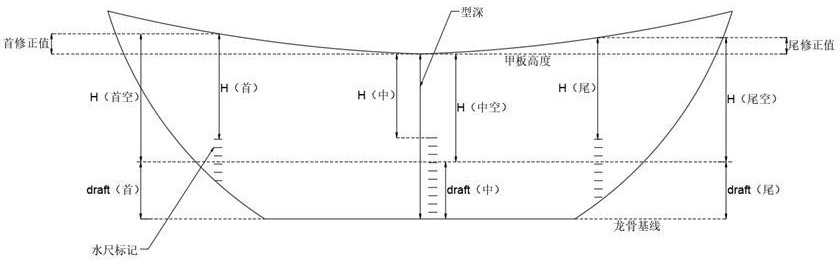
3、步骤1:分别在船左舷和右舷的船首、船尾、船中位置设置雷达测量点,计算所述六个雷达测量点与水面的高度差h(空中左)、h(空首左)、h(空尾左),h(空中右)、h(空首右)、h(空尾右);
4、步骤2:通过激光测距仪计算所述货船左弦和右舷的首部、尾部的雷达测量点与对应的水尺标记最高点的高度差h(首左)、h(首右)、h(尾左)、h(尾右);
5、步骤3:计算两个船中测量点与对应的水尺标记最高点的高度差h(中左)、h(中右);
6、步骤4:通过所述步骤2和所述步骤3获取的数据计算船首左舷、船尾左舷与船中左舷测量点高度差的修正值以及船首右舷、船尾右舷与船中右舷测量点高度差的修正值h(首左修正)、h(尾左修正)、h(首右修正)、h(尾右修正);
7、步骤5:根据上述数据计算得到六个测量点的最终吃水数据draft(首左)、draft(首右)、draft(尾左)、draft(尾右)、draft(中左)、draft(中右);
8、步骤6:根据所述步骤5的数据计算所述货船的船首、船中、船尾的左右横倾值list(首)、list(中)、list(尾)以及所述货船的船首的前后纵倾值trim(首)、船尾的前后纵倾值trim(尾);
9、步骤7:对所述步骤5的最终吃水数据和所述步骤6的左右横倾值、前后纵倾值进行数据处理,得到所述货船的吃水均值;
10、步骤8:根据所述吃水均值计算出所述货船的计重结果。
11、优选地,为使测量更加准确,船中处雷达测量点与夹板线标记一致,同时,各个雷达测量点均设置在水尺标记正上方;
12、优选地,所述步骤2包括:
13、步骤2.1:测量雷达测量点(a)点与岸边固定点(sa)的距离(la)和角度(α);
14、其中,所述la为岸边固定点到所述船体的直线距离,所述角度(α)为雷达测量点与固定点的连线与水平面的夹角;
15、优选地,可通过激光测距仪测量所述雷达测量点(a)点与岸边固定点(sa)的距离(la)和角度(α);
16、步骤2.2:计算所述雷达测量点(a)点到岸边固定点(sa)点的垂直高度差;
17、优选地,雷达测量点(a)点到岸边固定点(sa)点的垂直高度差按式(1)计算:
18、ha=la·sin(α) (1)
19、步骤2.3:测量水尺标记最高点(b)点与岸边固定点(sa)的距离(lb)和角度(β);
20、其中,所述lb为岸边固定点到水尺标记最高点的直线距离,所述角度(β)为雷达测量点与水尺标记最高点的连线与水平面的夹角;
21、优选地,通过激光测距仪测量所述雷达测量点(a)点与岸边固定点(sa)的距离(lb)和角度(β);
22、步骤2.4:计算水尺标记最高点(b)点与固定点(sa)点的垂直高度差;
23、优选地,所述计算水尺标记最高点(b)点与岸边固定点(sa)点的高度差;按式(2)计算:
24、hb=lb·sin(β) (2)
25、步骤2.4:计算雷达测量点(a)点与水尺标记最高点(b)点的高度差h;
26、优选地,按式(3)计算雷达测量点(a)点与水尺标记最高点(b)点的高度差h:
27、h=ha+hb (3)
28、根据上述过程,可计算得到左舷船首、左舷船尾、右舷船首、右舷船尾的测量点与水尺标记最高点点的高度差h(首左)、h(首右)、h(尾左)、h(尾右)。
29、优选地,所述船中位置的夹板线的测量点与水尺标记最高点的高度差h(中左)和h(中右)的计算公式为:
30、h(中左)= h(中右)=h(型深)-h(水尺标记最高点刻度值) (4)
31、其中:h(型深)为船舶中部夹板高度到底部龙骨基线的距离,通过查阅船舶图表得到;h(水尺标记最高点刻度值)通过观察水尺标记得到。
32、优选地,所述船首左舷、船尾左舷与船中左舷测量点高度差的修正值的计算公式为:
33、h(首左修正)= h(首左)- h(中左) (5)
34、h(尾左修正)= h(尾左)- h(中左) (6)
35、优选地,所述船首右舷、船尾右舷与船中右舷测量点高度差的修正值的计算公式为:
36、h(首右修正)= h(首右)- h(中右) (7)
37、h(尾右修正)= h(尾右)- h(中右) (8)
38、优选地,船中左舷测量点的最终吃水数据draft(中左)按式(9)计算得到:
39、draft(中左)= h(型深)- h(空中左) (9)
40、优选地,船中右舷测量点的最终吃水数据draft(中右)按式(8)计算得到:
41、draft(中右)= h(型深)- h(空中右) (10)
42、实际上,已经h(空中左)、h(空中右)由步骤1测量得到,h(型深)可通过查阅该货船资料得到,这样即可算出船中左舷测量点和右舷测量点的最终吃水数据;
43、优选地,船首左舷测量点的最终吃水数据按式(11)计算:
44、draft(首左)= h(型深)+ h(首左修正)- h(空首左) (11)
45、优选地,船尾左舷测量点的最终吃水数据按式(12)计算:
46、draft(尾左)= h(型深)+ h(尾左修正)- h(空尾左) (12)
47、优选地,船首右舷测量点的最终吃水数据按式(13)计算:
48、draft(首右)= h(型深)+ h(首右修正)- h(空首右) (13)
49、优选地,船尾右舷测量点的最终吃水数据按式(14)计算:
50、draft(尾右)= h(型深)+ h(尾右修正)- h(空尾右) (14)
51、至此,六个雷达测量点的最终吃水数据即测量完成,同时,雷达测量点测量的是吃水高度随着时间变化的二维曲线,所以上述的六个最终吃水同样为吃水高度随着时间变化的二维曲线。
52、优选地,所述船首的左右横倾值list(首)、船中的左右横倾值list(中)、船尾的左右横倾值list(尾)的计算公式为:
53、list(首)= draft(首左)- draft(首右) (15)
54、list(中)= draft(中左)- draft(中右) (16)
55、list(尾)= draft(尾左)- draft(尾右) (17)
56、优选地,所述货船的船首的前后纵倾值trim(首)、船尾的前后纵倾值trim(尾)的计算公式为:
57、trim(首)= draft(首左)- draft(尾左) (18)
58、trim(尾)= draft(尾右)- draft(首右) (19)
59、通过上述的步骤,共获取了十一组数据用于后续的计重计算,所述11组数据分别为draft(首左)、draft(首右)、draft(尾左)、draft(尾右)、draft(中左)、draft(中右)、list(首)、list(中)、list(尾)、trim(首)、trim(尾)数据。
60、优选地,对所述11组数据进行数据处理具体为:
61、s7.1:将每组数据以二十个点为一个单元计算每一个单元中数据的标准偏差值,用以反映每一个单元中20个点的分散程度;
62、具体地,所述标准偏差的计算公式为:
63、
64、式中,所述s为该组数据的标准偏差值,所述n为该组数据的数据个数,n=20,所述xi为该组数据中的第i个数据,为该组数据的平均值;
65、s7.2: 将每组数据中的每个单元的标准偏差值按照从小到大排序,筛选出标准偏差值前30%的单元,将所述标准偏差值前30%单元中的数据取平均作为该组数据中用于计算货船吃水的值;
66、s7.3:对所述11组数据分别实施所述s7.1和s7.2,得到11个用于计算所述货船吃水的值;
67、s7.4:对所述11个用于计算货船吃水的值取平均值从而得到吃水均值。
68、优选地,根据所述吃水均值,通过水尺计重规程,查表,修约计算出最终的水尺计重结果。
69、根据本发明的另一方面,提供一种计算机可读存储介质,计算机可读存储介质上存储有数据处理程序,数据处理程序被处理器执行上述的一种大宗货船水尺计重方法。
70、基于上述技术方案,本技术提供的一种基于测量吃水距离的大宗货船水尺计重方法及计算机可读存储介质,具有如下技术效果:
71、本发明通过雷达设备以及激光测距设备实现全自动数字化测量,同时,通过在船首右舷、船首左舷、船中右舷、船中左舷、船尾右舷、船尾左舷分别设置了6个雷达测量点,同时测量数据,从而消除了逐次测量因为浪涌等造成的误差;同时,本发明在计算货船吃水时,通过为draft(首左)、draft(首右)、draft(尾左)、draft(尾右)、draft(中左)、draft(中右)、list(首)、list(中)、list(尾)、trim(首)、trim(尾)十一组数据进行计算,相较于现有技术中的6组数据计算,提高了计算的精度;同时,本发明通过对十一组数据进行分析进一步实现数据的智能选择和处理,进一步提高了参与吃水计算的数据的精度,通过本发明的方案使困扰行业多年的顽疾得到彻底解决,提高了水尺计重的准确性。
本文地址:https://www.jishuxx.com/zhuanli/20240722/223540.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。