一种分离式MPF推进的水下机器人及其移动方法
- 国知局
- 2024-08-01 06:28:27
本发明涉及海洋设备航行器领域,尤其是一种分离式mpf推进的水下机器人及其移动方法。
背景技术:
1、海洋设备的开发也逐渐成为大家关注的焦点。传统的航行器采用螺旋桨作为驱动装置,这种驱动方式具有较大噪音且生物亲和性差。仿生学通过研究和模仿生物结构来解决具体问题的科学。
2、鱼类的推进模式根据推进器官的不同分为身体/尾推进模式(body and/orcaudalfin,bcf)和中央/对推进模式(median and/or paired fin,mpf)两大类bcf模式的鱼类约占鱼类总量的85%,mpf模式的约占15%。整体而言,bcf模式比mpf模式能够达到更高的游泳速度,mpf模式在机动性,稳定性等方面相较于bcf模式都有着巨大的优势。因此,mpf推进模式更适合在水下作业机器人上应用。
3、水下机器人在进行水下工作的时候,往往需要进行某一个方向的单向移动,例如进行海洋剖面观测需要进行z方向的移动。传统mpf推进方式的水下机器人在进行某一个方向的运动时,往往会产生其他方向的分力。这使得它的单向运动变得困难,传统的mpf推进形式的水下机器人仅可以实现x方向的移动和绕z方向的定向。
4、传统实现mpf六自由度的方法包括:添加螺旋桨或增加重心调节装置。上述方法均具有一定的局限性。添加螺旋桨的方法在进行生物观测任务或执行军事任务时,其产生的噪音容易引起任务的失败。通过添加重心调节装置,让机器人产生倾覆,从而完成六自由度的实现,这种方法速度较慢,且控制难度较大,在实际使用过程中,极其容易受到外部的干扰。
技术实现思路
1、为了克服现有技术中存在的上述问题,本发明提出一种分离式mpf推进的水下机器人。
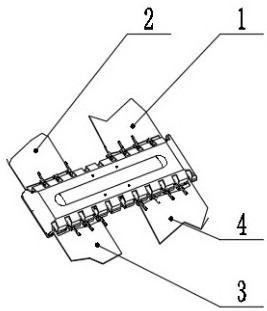
2、本发明解决其技术问题所采用的技术方案是: 一种分离式mpf推进的水下机器人,包括波动鳍、底板、外壳、控制舱、驱动系统,所述外壳底部设置有底板,所述外壳和底板形成的空腔内设置有控制舱和驱动系统,所述外壳上预留有安装孔用于安装波动鳍,所述波动鳍与驱动系统连接,所述波动鳍包括四个,四个所述波动鳍形状符合正弦曲线,四个所述波动鳍均能实现正反方向波动。
3、上述的一种分离式mpf推进的水下机器人,所述驱动系统包括舵机、连接杆,所述舵机固定安装于底板上,所述舵机与舵机臂连接,所述舵机臂通过连接杆与转向座连接,所述转向座与转向杆固定连接,所述转向杆与波动鳍固定连接。
4、上述的一种分离式mpf推进的水下机器人,所述外壳为树脂材料,所述底板为碳纤维材料。
5、上述的一种分离式mpf推进的水下机器人,所述波动鳍形状具体表达式为:
6、;
7、其中,a表示波动鳍的幅值,z表示波动鳍的z坐标,f表示波动鳍的波动频率,t表示时间,φ表示相位,λ表示波数,x1表示前波动鳍的x坐标,x2表示后波动鳍的x坐标,y1表示前波动鳍的y坐标,y2表示后波动鳍的y坐标。
8、一种分离式mpf推进的水下机器人的移动方法,基于上述的一种分离式mpf推进的水下机器人,具体包括:
9、水下机器人水平放置时建立坐标系,以平行于外壳方向为x轴,以垂直于外壳方向为z轴,以横穿外壳方向为y轴波动鳍,在y轴和z轴组成的二维坐标系中,自右上角开始逆时针依次为象限1、象限2、象限3、象限4;四个波动鳍自右上角开始顺时针依次为波动鳍一、波动鳍二、波动鳍三、波动鳍四;验证x轴正方向的波动为正运动,验证x轴负方向的运动为反运动;
10、水下机器人沿x轴方向移动:四个波动鳍均采用正运动,波动鳍一、波动鳍二在象限1、象限4运动,波动鳍三、波动鳍四在象限2、象限3运动;
11、水下机器人沿y轴方向移动:波动鳍一、波动鳍二保持不动,波动鳍三在象限2、象限3内正运动,波动鳍四在象限2、象限3内反运动;
12、水下机器人沿z轴方向移动:波动鳍一、波动鳍四正运动,波动鳍二、波动鳍三反运动,波动鳍一、波动鳍二在象限4内运动,波动鳍三、波动鳍四在象限3内运动;
13、绕x轴转动:波动鳍一、波动鳍四采用正运动,波动鳍二、波动鳍三采用反运动,波动鳍一、波动鳍二在象限1运动,波动鳍三、波动鳍四在象限3运动;
14、绕y轴转动:波动鳍一、波动鳍四采用正运动,波动鳍二、波动鳍三采用反运动,波动鳍一在象限1运动,波动鳍二在象限4运动,波动鳍四在象限2运动,波动鳍三在象限3运动;
15、绕z轴转动:波动鳍一、波动鳍二采用正运动,波动鳍三、波动鳍四采用反运动,波动鳍一、波动鳍二在象限1、象限4运动,波动鳍三、波动鳍四在象限2、象限3运动。
16、本发明的有益效果是,依靠mpf推进方式自身即可实现六自由度移动,无需增加任何机构,本发明具有高机动性,稳定可靠,低噪音、低扰动的优点。
技术特征:1.一种分离式mpf推进的水下机器人,其特征在于,包括波动鳍、底板、外壳、控制舱、驱动系统,所述外壳底部设置有底板,所述外壳和底板形成的空腔内设置有控制舱和驱动系统,所述外壳上预留有安装孔用于安装波动鳍,所述波动鳍与驱动系统连接,所述波动鳍包括四个,四个所述波动鳍形状符合正弦曲线,四个所述波动鳍均能实现正反方向波动。
2.根据权利要求1所述的一种分离式mpf推进的水下机器人,其特征在于,所述驱动系统包括舵机、连接杆,所述舵机固定安装于底板上,所述舵机与舵机臂连接,所述舵机臂通过连接杆与转向座连接,所述转向座与转向杆固定连接,所述转向杆与波动鳍固定连接。
3.根据权利要求1所述的一种分离式mpf推进的水下机器人,其特征在于,所述外壳为树脂材料,所述底板为碳纤维材料。
4.根据权利要求1所述的一种分离式mpf推进的水下机器人,其特征在于,所述波动鳍形状具体表达式为:
5.一种分离式mpf推进的水下机器人的移动方法,其特征在于,基于权利要求1-4任一项所述的一种分离式mpf推进的水下机器人,具体包括:
技术总结本发明公开了一种分离式MPF推进的水下机器人及其移动方法,涉及海洋设备航行器领域,包括波动鳍、底板、外壳、控制舱、驱动系统,所述外壳底部设置有底板,所述外壳和底板形成的空腔内设置有控制舱和驱动系统,所述外壳上预留有安装孔用于安装波动鳍,所述波动鳍与驱动系统连接,所述波动鳍包括四个,四个所述波动鳍形状符合正弦曲线,四个所述波动鳍均能实现正反方向波动。本发明依靠MPF推进方式自身即可实现六自由度移动,无需增加任何机构,具有高机动性,稳定可靠,低噪音、低扰动的优点。技术研发人员:李广浩,刘贵杰,王文谦,许传新,姚兵受保护的技术使用者:中国海洋大学技术研发日:技术公布日:2024/4/22本文地址:https://www.jishuxx.com/zhuanli/20240722/223915.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表