一种水上机器人的制作方法
- 国知局
- 2024-08-01 06:28:23
本技术涉及水上机器人,具体而言,涉及一种水上机器人。
背景技术:
1、随着水上机器人技术的不断发展,水上机器人被更多用户的选择。但是,在实际使用过程中,存在这样一个问题:水上机器人的结构较为复杂,在清理水上机器人的容纳篮中垃圾后,需要将容纳篮装回水上机器人内部,但水上机器人内部设有多个凸起,用于卡住容纳篮,在将容纳篮装回水上机器人内部时,非常不便,因此,简化水上机器人内部结构,方便用户安装容纳篮是十分必要的。
技术实现思路
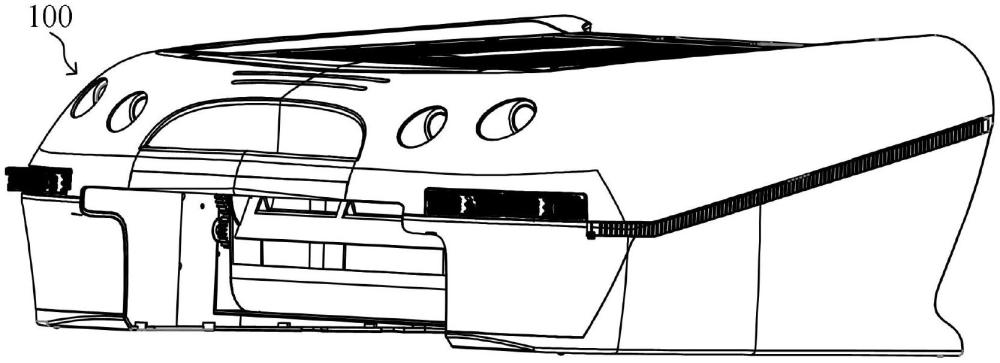
1、因此,本实用新型提供一种水上机器人。水上机器人包括:水上机器人本体,水上机器人本体设有壳体,壳体设有开口,底板,底板设于壳体的底部,并且与壳体的侧壁相连,底板覆盖开口的至少部分,以放置容纳篮;其中,水上机器人设有头端和尾端,水流通过头端流进水上机器人本体,并且通过尾端流出水上机器人本体,底板与头端存有间隙,形成进水口,底板与尾端存有间隙,形成出水口。
2、与现有技术相比,采用该技术方案所达到的技术效果:水上机器人内部设有底板,不仅限制了容纳篮沿自身重力方向的移动,防止容纳篮脱离水上机器人本体,而且内部结构简单,方便用户装回容纳篮,便于拆装。底板与头端和尾端分别存有间隙,形成进水口和出水口,便于水上机器人内部的水向外部排出。
3、进一步的,壳体包括:筋板,筋板设于底板与侧壁的连接处,筋板的边缘与底板的至少部分贴合,筋板的另一边缘与侧壁的至少部分贴合。
4、与现有技术相比,采用该技术方案所达到的技术效果:筋板设于底板与侧壁的连接处,增加底板与侧壁连接的可靠性,防止底板发生形变。
5、进一步的,底板设有格栅。
6、与现有技术相比,采用该技术方案所达到的技术效果:底板上设有格栅,减轻了底板的重量,同时,在用户提起水上机器人后,便于水上机器人内部的水向外部排出,防止水上机器人内部积水。
7、进一步的,水上机器人还包括:转动装置,转动装置设于水上机器人本体的头端,以控制水上机器人移动的方向。
8、与现有技术相比,采用该技术方案所达到的技术效果:转动装置设于水上机器人的头端,在水上机器人运行时,控制水上机器人移动的方向。
9、进一步的,转动装置包括:至少一个转动轮,至少一个转动轮通过固定销固定在壳体。
10、与现有技术相比,采用该技术方案所达到的技术效果:转动装置由至少一个转动轮组成,转动轮旋转,带动水上机器人调整移动的方向。转动轮通过固定销固定在壳体上,固定方式更加简单,拆卸和安装时更加方便。
11、进一步的,转动装置对称地设于头端的两侧。
12、与现有技术相比,采用该技术方案所达到的技术效果:转动装置对称设置,使得水上机器人本体受力平衡,调整移动的方向时更加稳定,避免水上机器人受力不均而发生侧翻。
13、进一步的,水上机器人还包括:驱动装置,驱动装置设于水上机器人本体的尾端,驱动装置包括:驱动电机,驱动轮,驱动电机和驱动轮相连,并且,驱动轮朝向壳体的外侧。
14、与现有技术相比,采用该技术方案所达到的技术效果:驱动装置设于尾端,推动水上机器人本体移动。驱动电机与驱动轮相连,带动驱动轮旋转,从而推动水上机器人本体移动。
15、进一步的,容纳篮还包括:收集口,刷筒,刷筒设于收集口,并且刷筒遮盖收集口的至少部分。
16、与现有技术相比,采用该技术方案所达到的技术效果:容纳篮设有收集口,水上机器人收集的漂浮物通过收集口进入容纳篮中,刷筒设于收集口处,刷筒在转动时,将收集口处的漂浮物送进容纳篮中,防止收集口堵塞,影响水上机器人的清洁效果。
17、进一步的,水上机器人还包括:刷筒电机,刷筒电机与刷筒相连,并且刷筒电机驱动刷筒旋转。
18、与现有技术相比,采用该技术方案所达到的技术效果:刷筒通过刷筒电机驱动旋转,使得刷筒转动的速度更加稳定,通过刷筒电机驱动刷筒,组装更加方便。
19、进一步的,刷筒电机设有第一齿轮,刷筒设有第二齿轮,第一齿轮与第二齿轮相互啮合。
20、与现有技术相比,采用该技术方案所达到的技术效果:第一齿轮与第二齿轮相互啮合,并且第一齿轮在电机的驱动下旋转,带动第二齿轮旋转,从而带动刷筒旋转,通过齿轮传动,刷筒旋转的的速度更加稳定。
21、采用本实用新型的技术方案后,能够达到如下技术效果:
22、(1)水上机器人内部设有底板,不仅限制了容纳篮沿自身重力方向的移动,防止容纳篮脱离水上机器人本体;
23、(2)筋板设于底板与侧壁的连接处,增加底板与侧壁连接的可靠性,防止底板发生形变;
24、(3)底板上设有格栅,减轻了底板的重量,同时,在用户提起水上机器人后,便于水上机器人内部的水向外部排出,防止水上机器人内部积水。
技术特征:1.一种水上机器人,其特征在于,所述水上机器人包括:
2.根据权利要求1所述的水上机器人,其特征在于,所述壳体(110)包括:
3.根据权利要求1所述的水上机器人,其特征在于,所述底板(130)设有格栅。
4.根据权利要求1所述的水上机器人,其特征在于,所述水上机器人还包括:
5.根据权利要求4所述的水上机器人,其特征在于,所述转动装置(140)包括:
6.根据权利要求4所述的水上机器人,其特征在于,所述转动装置(140)对称地设于所述头端(100a)的两侧。
7.根据权利要求4所述的水上机器人,其特征在于,所述水上机器人还包括;
8.根据权利要求1所述的水上机器人,其特征在于,所述容纳篮(120)还包括:
9.根据权利要求8所述的水上机器人,其特征在于,所述水上机器人还包括:
10.根据权利要求9所述的水上机器人,其特征在于,所述刷筒电机(123)设有第一齿轮(123a),所述刷筒(122)设有第二齿轮(122a),所述第一齿轮(123a)与所述第二齿轮(122a)相互啮合。
技术总结本技术提供了一种水上机器人,水上机器人包括:水上机器人本体,水上机器人本体设有壳体,壳体设有开口,底板,底板设于壳体的底部,并且与壳体的侧壁相连,底板覆盖开口的至少部分,以放置容纳篮;其中,水上机器人设有头端和尾端,水流通过头端流进水上机器人本体,并且通过尾端流出水上机器人本体,底板与头端存有间隙,形成进水口,底板与尾端存有间隙,形成出水口。水上机器人内部设有底板,不仅限制了容纳篮沿自身重力方向的移动,防止容纳篮脱离水上机器人本体,而且内部结构简单,方便用户装回容纳篮,便于拆装。底板与头端和尾端分别存有间隙,形成进水口和出水口,便于水上机器人内部的水向外部排出。技术研发人员:周瑞,林建航受保护的技术使用者:宁波瑞丰创智科技有限公司技术研发日:20231016技术公布日:2024/4/22本文地址:https://www.jishuxx.com/zhuanli/20240722/223910.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表