一种舷侧绑扎平台下方的平行支撑装置的制作方法
- 国知局
- 2024-08-01 06:31:07
本技术涉及船舶设备,尤其涉及一种舷侧绑扎平台下方的平行支撑装置。
背景技术:
1、小型集装箱船通常采用绑扎平台的方式对甲板面或舱口盖上的集装箱进行绑扎,绑扎平台为了便于船员的通行,需要船员到达绑扎固定区域的各个角落,绑扎平台会贯穿整个最大船宽。绑扎平台布置在舱口围上,舱口围不能贯穿最大船宽,即绑扎平台在到达最舷侧时,绑扎平台是与箱柱连接。
2、现有绑扎平台舷侧与箱柱的固定方式是成八字形做支撑连接,参见图1,且绑扎平台是连续性并且贯穿整个船宽。集装箱船在满载的工况航行下,舷侧箱柱与舱口围之间存在滑移量,滑移量通常在10~20mm之间,肉眼不可见。且同一个绑扎平台支撑的两个箱柱之间同样存在扭力,船舶满载航行中,由于受到纵横倾力的影响,箱柱与舱口围之间和滑移量和箱柱与箱之间的扭力会挤压舷侧的绑扎平台,从而使绑扎平台的舷侧支撑力发生形变,从而产生物理断裂的可能,导致集装箱的坠落甚至损坏,造成损失,同时也存在一定的安全隐患。
技术实现思路
1、本实用新型的目的在于克服上述不足,提供一种舷侧绑扎平台下方的平行支撑装置,改变绑扎平台舷侧部分与箱柱之间的连接形式,避免绑扎平台支撑断裂,避免船员在绑扎集装箱过程中的安全隐患。
2、本实用新型的目的是这样实现的:
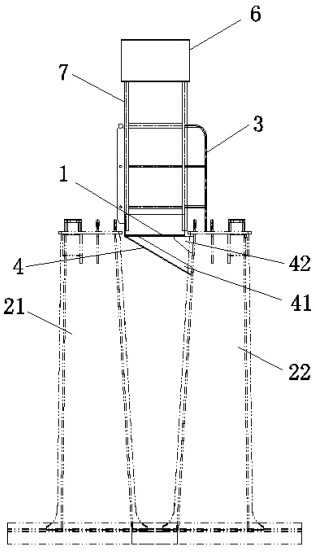
3、一种舷侧绑扎平台下方的平行支撑装置,它包括设置在绑扎平台下方的平行支撑组件,所述绑扎平台的左右两侧分别设有左箱柱和右箱柱,所述绑扎平台上设有纵横栏杆组成的装载框架;所述平行支撑组件包括外支撑臂和内支撑臂,所述外支撑臂和内支撑臂平行设置在绑扎平台的下方,所述外支撑臂的一端与绑扎平台的左端底部连接,外支撑臂的另一端与右箱柱连接,所述内支撑臂的一端与绑扎平台的右端底部连接,内支撑臂的另一端与右箱柱连接。
4、进一步地,所述绑扎平台上的框架的上方设有投光灯。
5、进一步地,所述投光灯的底部连接多个投光灯支柱,投光灯支柱的底端固定在外支撑臂上,用于支撑投光灯。
6、进一步地,所述绑扎平台设置在舷侧箱柱与舱口围之间,与舱口围上的整体绑扎平台断开。
7、进一步地,所述绑扎平台的下方设有直梯,用于攀爬。
8、与现有技术相比,本实用新型的有益效果是:
9、本实用新型采用独立的绑扎平台,随着舷侧箱柱与舱口围之间有了独立的绑扎平台,与舱口围上的整体绑扎平台不连续,减少了箱柱与舱口围之间的滑移量,绑扎平台不会受到滑移量的影响而受到形变挤压。
10、本实用新型采用平行支撑臂,随着绑扎平台舷侧的支撑与单侧箱柱支撑,箱柱与箱柱的位移扭动不会影响绑扎平台,绑扎平台不会受到扭力的影响而受到形变挤压;保证了舷侧绑扎平台不会因以上两个原因物理断裂,保证了船员绑扎的安全性。
技术特征:1.一种舷侧绑扎平台下方的平行支撑装置,其特征在于:它包括设置在绑扎平台(1)下方的平行支撑组件(4),所述绑扎平台(1)的左右两侧分别设有左箱柱(21)和右箱柱(22),所述绑扎平台(1)上设有纵横栏杆(3)组成的装载框架;所述平行支撑组件(4)包括外支撑臂(41)和内支撑臂(42),所述外支撑臂(41)和内支撑臂(42)平行设置在绑扎平台(1)的下方,所述外支撑臂(41)的一端与绑扎平台(1)的左端底部连接,外支撑臂(41)的另一端与右箱柱(22)连接,所述内支撑臂(42)的一端与绑扎平台(1)的右端底部连接,内支撑臂(42)的另一端与右箱柱(22)连接。
2.根据权利要求1所述的一种舷侧绑扎平台下方的平行支撑装置,其特征在于:所述绑扎平台(1)上的框架的上方设有投光灯(6)。
3.根据权利要求2所述的一种舷侧绑扎平台下方的平行支撑装置,其特征在于:所述投光灯(6)的底部连接多个投光灯支柱(7),投光灯支柱(7)的底端固定在外支撑臂(41)上,用于支撑投光灯(6)。
4.根据权利要求1所述的一种舷侧绑扎平台下方的平行支撑装置,其特征在于:所述绑扎平台(1)设置在舷侧箱柱与舱口围之间,与舱口围上的整体绑扎平台断开。
5.根据权利要求1所述的一种舷侧绑扎平台下方的平行支撑装置,其特征在于:所述绑扎平台(1)的下方设有直梯(5),用于攀爬。
技术总结本技术涉及的一种舷侧绑扎平台下方的平行支撑装置,它包括设置在绑扎平台下方的平行支撑组件,所述绑扎平台的左右两侧分别设有左箱柱和右箱柱,所述绑扎平台上设有纵横栏杆组成的装载框架;所述平行支撑组件包括外支撑臂和内支撑臂,所述外支撑臂和内支撑臂平行设置在绑扎平台的下方,所述外支撑臂的一端与绑扎平台的左端底部连接,外支撑臂的另一端与右箱柱连接,所述内支撑臂的一端与绑扎平台的右端底部连接,内支撑臂的另一端与右箱柱连接。本技术采用平行支撑臂,随着绑扎平台舷侧的支撑与单侧箱柱支撑,箱柱与箱柱的位移扭动不会影响绑扎平台,绑扎平台不会受到扭力的影响而受到形变挤压;保证了船员绑扎的安全性。技术研发人员:蒋文彬,须涛,徐铭,徐瑾受保护的技术使用者:江苏新扬子造船有限公司技术研发日:20231013技术公布日:2024/4/24本文地址:https://www.jishuxx.com/zhuanli/20240722/224026.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种水下链式球形机器人
下一篇
返回列表