一种仿生章鱼的无人潜航器的制作方法
- 国知局
- 2024-08-01 06:34:55
本发明涉及潜航器,特别是涉及一种仿生章鱼的无人潜航器。
背景技术:
1、在深海全海域科考、洋流观测、深海探矿、采矿、深海救捞,或者发生水灾、矿难、以及水下探测时,一般需要用到潜艇,其主要用于水下搜救、探测。如公开号为cn201999188u的中国发明专利,中记载的用于矿难搜救的潜艇。
2、常规的液压/压缩空气驱动的机器人,一根仿生肌肉就需要一套独立的供能、驱动控制系统,对于简单功能还不成问题,但是随着机器人功能的增加,累加的独立供能、控制系统就成为无法摆脱的麻烦和耗载。
3、常规的可运行于深海的无人考察、勘测设备,如果想长期工作在极端高压环境下,必须使用耐高压贵金属制造;造价昂贵、笨重的深潜潜艇或勘察、打捞设备,附加昂贵的维护费用,使得深海科考、探矿和采矿等经济行为不再具备经济可行性。
技术实现思路
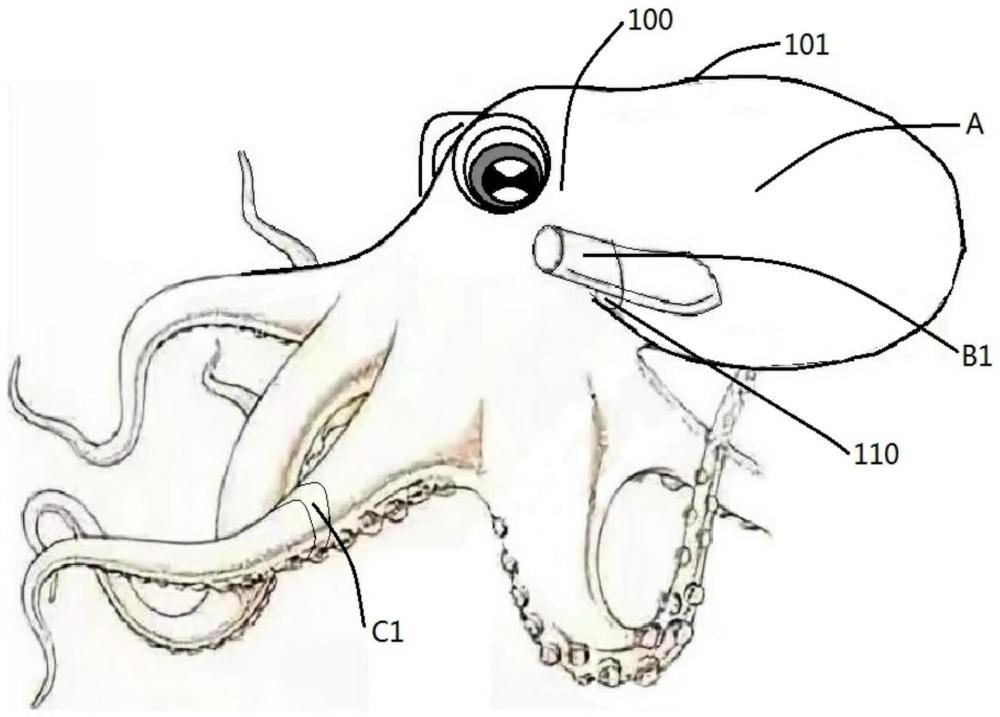
1、为了克服现有技术的不足,本发明提供一种仿生章鱼的无人潜航器,包括总括结构,所述总括结构外观设为章鱼形状;所述总括结构外表面固定设有外套膜,所述总括结构内部设有可动态调压/驱动的循环系统,所述总括结构侧面设有仿生虹吸管一,且所述仿生虹吸管一下面设有下口腔,所述总括结构的触角设为仿生腕臂。
2、优选的,所述循环系统内部包括磁悬浮电机,所述磁悬浮电机输出端固定设有变频水泵,所述变频水泵的吸入端固定设有下口腔,所述后置腔内部靠近变频水泵一端设有传感器三,所诉后置腔内部远离变频水泵一端固定设有传感器二;所述变频水泵另一端固定设有前置腔,所述前置腔内部靠近变频水泵一端固定设有单向阀一,且所述前置腔内部设有传感器十二。
3、优选的,所述后置腔靠近磁悬浮电机一端固定设有排水管,所述排水管靠近传感器二一端固定设有单向阀三;所述变频水泵两侧分别固定设有仿生虹吸管一与仿生虹吸管二;且仿生虹吸管一与仿生虹吸管二结构一致。
4、优选的,所述仿生虹吸管一包括管状外套膜、高压供水管、环状弹性体和组成;所述管状外套膜的内腔壁内部设有多个高压供水管,所述内腔壁中部设有锥形弹性体单元,且锥形弹性体单元中部设有硅胶状内膜,所述硅胶状内膜内部固定设有多个排水单向阀一;所述高压供水管一外侧面设有进水阀室,所述进水阀室内部设有进水单向阀一单向阀开关;所述锥形弹性体单元内部设有多个传感器七。
5、优选的,所述仿生腕臂包括柔性仿生肌肉束和仿生吸盘组成,多个仿生吸盘环绕设置在柔性仿生肌肉束外壁周围;所述仿生腕臂中部设有贯通整个仿生腕臂的核心管腔;所述核心管腔中部固定设有高压进水管一,所述高压进水管一两侧在核心管腔内部设有电缆一,且所述核心管腔内部还设有芯片组一。
6、优选的,所述柔性仿生肌肉束设为多个标准弹性体单元组成,所述标准弹性体单元两端分别固定设有进水阀室和排水阀室。
7、优选的,所述仿生吸盘包括真空发生器、空腔、硬质锥形垫片和外套膜五组成,所述真空发生器内部设为真空腔室一,所述真空腔室一内部设有悬垂体,在所述真空发生器内部悬垂体顶部固定设有传感器十一,所述悬垂体左侧固定设有进水单向阀三,所述悬垂体右侧设有排水单向阀三。
8、与现有技术相比,本发明能达到的有益效果是:通过本仿生章鱼的无人潜航器的使用材料与传统无人潜航器相比,本发明的成本更加的低成本、高效率:且通过巧妙设计,用普通材料、简单结构解决深潜面临的各种极端问题,使全海域广泛部署深海无人潜航器(使用狼群战术)成为可能;
9、通过采用外面形似章鱼的形状,使得本仿生章鱼的无人潜航器就近使用的在本仿生章鱼的无人潜航器周围的海水(甚至所有流体)作为驱动介质,一举解决深潜无人机的极端压力适应和驱动效率两大难题;
10、本发明采用标准化仿生驱动元器件;且通过不同组合和嵌套,一种结构简单的标准化仿生驱动单元可以适配几乎任何造型、任何大小、任何任务的无人机(机器人);
11、本发明的仿生章鱼的无人潜航器的工作单元能够在算法的配合下,可以做到比人手还灵活,使得探测更加准确,方便。
技术特征:1.一种仿生章鱼的无人潜航器,包括总括结构(100),其特征在于:所述总括结构(100)外观设为章鱼形状;所述总括结构(100)外表面固定设有外套膜(101),所述总括结构(100)内部设有可动态调压/驱动的循环系统(a),所述总括结构(100)侧面设有仿生虹吸管一(b1),且所述仿生虹吸管一(b1)下面设有下口腔(110),所述总括结构(100)的触角设为仿生腕臂(c1)。
2.根据权利要求1所述的一种仿生章鱼的无人潜航器,其特征在于:所述循环系统(a)内部包括磁悬浮电机(a101),所述磁悬浮电机(a101)输出端固定设有变频水泵(a102),所述变频水泵(a102)的吸入端固定设有a下口腔(110),所述后置腔(a110)内部靠近变频水泵(a102)一端设有传感器三(a112),所诉后置腔(a110)内部远离变频水泵(a102)一端固定设有传感器二(a111);所述变频水泵(a102)另一端固定设有前置腔(a103),所述前置腔(a103)内部靠近变频水泵(a102)一端固定设有单向阀一(a104),且所述前置腔(a103)内部设有传感器十二(a105)。
3.根据权利要求2所述的一种仿生章鱼的无人潜航器,其特征在于:所述后置腔(a110)靠近磁悬浮电机(a101)一端固定设有排水管(a113),所述排水管(a113)靠近传感器二(a111)一端固定设有单向阀三(a114);所述变频水泵(a102)两侧分别固定设有仿生虹吸管一(b1)与仿生虹吸管二(b2);且仿生虹吸管一(b1)与仿生虹吸管二(b2)结构一致。
4.根据权利要求1所述的一种仿生章鱼的无人潜航器,其特征在于:所述仿生虹吸管一(b1)包括管状外套膜(b110)、高压供水管(b120)、环状弹性体(b200)和(b500)组成;所述管状外套膜(b110)的内腔壁(b122)内部设有多个高压供水管(b120),所述内腔壁(b122)中部设有锥形弹性体单元(b210),且锥形弹性体单元(b210)中部设有硅胶状内膜(b150),所述硅胶状内膜(b150)内部固定设有多个排水单向阀一(b151);所述高压供水管(b120)一外侧面设有进水阀室(b121),所述进水阀室(b121)内部设有进水单向阀一单向阀开关(b201);所述锥形弹性体单元(b210)内部设有多个传感器七(b211)。
5.根据权利要求1所述的一种仿生章鱼的无人潜航器,其特征在于:所述仿生腕臂(c1)包括柔性仿生肌肉束(c100)和仿生吸盘(c500)组成,多个仿生吸盘(c500)环绕设置在柔性仿生肌肉束(c100)外壁周围;所述仿生腕臂(c1)中部设有贯通整个仿生腕臂(c1)的核心管腔(c11);所述核心管腔(c11)中部固定设有高压进水管一(c12),所述高压进水管一(c12)两侧在核心管腔(c11)内部设有电缆一(c14),且所述核心管腔(c11)内部还设有芯片组一(c13)。
6.根据权利要求5所述的一种仿生章鱼的无人潜航器,其特征在于:所述柔性仿生肌肉束(c100)设为多个标准弹性体单元(c200)组成,所述标准弹性体单元(c200)两端分别固定设有进水阀室(c202)和排水阀室(c212)。
7.根据权利要求5所述的一种仿生章鱼的无人潜航器,其特征在于:所述仿生吸盘(c500)包括真空发生器(c520)、空腔(c501)、硬质锥形垫片(c506)和外套膜五(c510)组成,所述真空发生器(c520)内部设为真空腔室一(c525),所述真空腔室一(c525)内部设有悬垂体(c524),在所述真空发生器(c520)内部悬垂体(c524)顶部固定设有传感器十一(c523),所述悬垂体(c524)左侧固定设有进水单向阀三(c521),所述悬垂体(c524)右侧设有排水单向阀三(c522)。
技术总结本发明公开了一种仿生章鱼的无人潜航器,包括总括结构,所述总括结构外观设为章鱼形状;所述总括结构外表面固定设有外套膜,所述总括结构内部设有可动态调压/驱动的循环系统,所述总括结构侧面设有仿生虹吸管一,且所述仿生虹吸管一下面设有下口腔,所述总括结构的触角设为仿生腕臂,就近以该潜航器周边的海水作为能量传递介质;不但利用海水来驱动,还利用海水的持续循环,动态调整该潜航器内部压力以适应周边海水的压力;其内部是由一台变频水泵驱动八条仿生腕臂和几百个仿生吸盘配合深潜及各种替代人手的水下工作;该潜航器同时设置两个仿生章鱼虹吸管的“推进器”,除了排出循环海水的“呼吸”作用,还可以模仿拉瓦尔喷管做水下高速巡航。技术研发人员:周欣受保护的技术使用者:周欣技术研发日:技术公布日:2024/5/8本文地址:https://www.jishuxx.com/zhuanli/20240722/224352.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表