一种水下潜航器的制作方法
- 国知局
- 2024-08-01 06:34:54
本发明涉及水下机器人,具体涉及一种水下潜航器。
背景技术:
1、水下潜航器是一种无人驾驶、靠遥控或自动控制在水下航行的器具,无人潜航器也被称为“潜水机器人”或“水下机器人”。如何减小水下潜航器在水下运动的阻力,进一步提高运动速度,是目前水下潜航器研究的重要方向之一。
2、中国专利号为202220573042.4公开了一种流线型水下搜索机器人。所述流线型水下搜索机器人包括机器人本体和具有收容空间的壳体,所述壳体包裹于所述机器人本体外部,用于降低机器人航行过程中的阻力。然而该方案中的壳体包裹推进器的部分不是光滑过渡,存在阻力。
3、本发明克服现有技术的缺点,提供一种水下潜航器,可以进一步减小航行阻力。
技术实现思路
1、本发明主要目的在于提供一种水下潜航器,其特征在于,包括控制舱体、浮力舱体、推进器和探测组件;
2、所述浮力舱体的外表面为流线型,所述浮力舱体包裹所述控制舱体,所述控制舱体为密封舱体,所述推进器和探测组件分别与所述控制舱体相连;
3、所述浮力舱体包括顶面、底面和周面,所述顶面和底面相对设置且相互平行,所述顶面和底面为平面,所述顶面与所述底面之间通过周面连接,所述顶面和底面分别与所述周面之间光滑过渡;
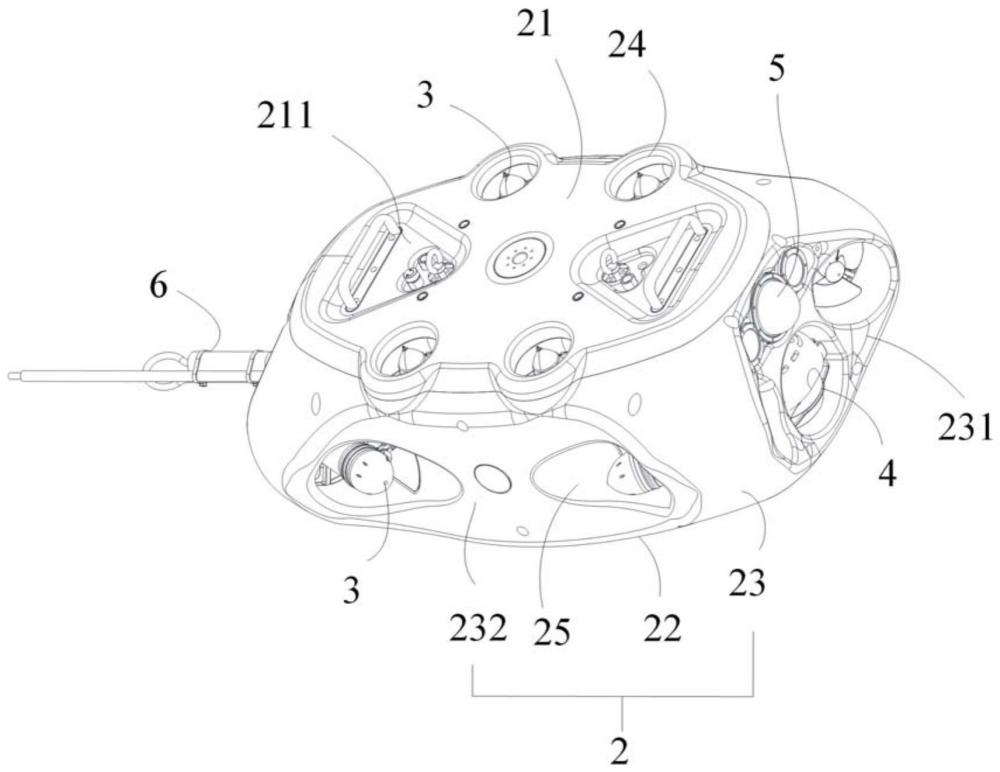
4、所述周面为外凸的流线型表面,所述周面设有两个第一区域和两个第二区域,两个所述第一区域对称分布于所述周面的前后侧,两个所述第二区域对称分布于所述周面的左右侧,所述周面的前侧和后侧分别光滑内凹形成所述第一区域,左侧和右侧分别光滑内凹形成所述第二区域,所述探测组件设于所述第一区域或/和所述第二区域;
5、所述顶面和底面之间通过第一通道贯通,所述第一区域和所述第二区域之间通过第二通道连通,所述第一通道和所述第二通道内设有所述推进器;
6、所述第一通道的数量至少为两个,以所述顶面的几何中心对称分布。
7、可选的,所述第二区域的面积大于所述第一区域的面积,所述探测组件包括第一声纳和第二声纳;
8、所述第一区域设有出线装置、摄像组件和第一声纳,所述出线装置与所述控制舱体连接,用于所述控制舱体和岸基组件之间的信号传输;所述摄像组件和第一声纳嵌入所述浮力舱体,分别与所述控制舱体连接,用于获取水下图像;
9、所述第二区域设有第二声纳,所述第二声纳嵌入所述浮力舱体,与所述控制舱体连接,用于获取水下图像。
10、可选的,所述出线装置包括弯曲组件,所述弯曲组件设有进线口、出线口和弯曲线槽,所述进线口通过所述弯曲线槽与所述出线口连通;线缆通过所述进线口进入到所述弯曲线槽内,沿所述弯曲线槽弯曲预定角度从所述出线口出线,所述线缆一端通过插头连接所述控制舱体,另一端与岸基组件连接。
11、可选的,所述摄像组件包括集成腔体,所述集成腔体嵌于所述浮力舱体,所述集成腔体内部中空,分为灯光室和摄像室,所述集成腔体连接一接口组件,所述接口组件连接所述控制舱体;所述灯光室内设有灯光组件,所述摄像室内设有摄像头。
12、可选的,所述推进器包括水平推进器和竖直推进器,每个所述第一通道对应设有一个所述竖直推进器,每个所述第二通道对应设有一个所述水平推进器;
13、所述竖直推进器垂直设置,相邻所述水平推进器的轴线之间呈预定角度设置;
14、所述第一通道的数量为4个,所述第二通道的数量为4个。
15、可选的,所述顶面设有凹陷区域和预留接口,所述底面设有预留接口和第三声纳或dvl,
16、所述凹陷区域内设有检测组件和开关,所述检测组件、开关穿过所述浮力舱体,分别与所述控制舱体连接;
17、所述预留接口嵌于所述浮力舱体表面,与所述控制舱体连接。
18、可选的,所述检测组件包括水深传感器,所述水深传感器与所述控制舱体连接,所述水深传感器用于检测水下潜航器所处的水下深度。
19、可选的,所述凹陷区域内设有吊钩、把手、牺牲阳极和真空测试快速堵头;
20、所述吊钩、把手、牺牲阳极穿过所述浮力舱体与所述控制舱体的壳体连接,所述真空测试快速堵头与所述控制舱体的内部连通;
21、所述吊钩和把手的数量分别为两个,所述吊钩呈对称分布,所述把手呈对称分布。
22、可选的,所述控制舱体设有支撑架和支撑面,所述支撑架与所述支撑面连接,所述支撑面与所述推进器的支撑环连接;
23、所述支撑面为弧面,所述第一通道和第二通道的表面设有弧面缺口,所述支撑面的形状与所述弧面缺口的形状匹配。
24、可选的,所述推进器还包括壳体、桨叶组件和密封轴套,所述壳体与所述支撑环固定连接,所述密封轴套内部为密封腔体,所述密封轴套内部设有减速组件,所述密封轴套的首端伸入所述桨叶组件中,所述密封轴套与所述桨叶组件之间通过动密封件连接,所述密封轴套的尾端与所述壳体固定连接,所述密封轴套与所述壳体的接触面之间设有静密封件;所述壳体内部为密封腔体,所述壳体内部设有动力组件,所述动力组件的输出轴连接所述减速组件,所述减速组件与所述桨叶组件传动连接。
25、与现有技术相比,本发明具有以下有益效果:
26、本发明提供的水下潜航器,通过将控制舱体和推进器包裹进流线型的浮力舱体中减少水下运动时的阻力,相同推力下可以实现更快地运动速度。并且在流线型的浮力舱体设置对称内凹的区域用作探测组件的安装位置,减小了外部探测组件的阻力干扰。除此之外,浮力舱体整体呈对称结构,推进器呈对称分布,受力均衡,稳定性好。
技术特征:1.一种水下潜航器,其特征在于,包括控制舱体、浮力舱体、推进器和探测组件;
2.根据权利要求1所述的水下潜航器,其特征在于,所述第二区域的面积大于所述第一区域的面积,所述探测组件包括摄像组件、第一声纳和第二声纳;
3.根据权利要求2所述的水下潜航器,其特征在于,所述出线装置包括弯曲组件,所述弯曲组件设有进线口、出线口和弯曲线槽,所述进线口通过所述弯曲线槽与所述出线口连通;线缆通过所述进线口进入到所述弯曲线槽内,沿所述弯曲线槽弯曲预定角度从所述出线口出线,所述线缆一端通过插头连接所述控制舱体,另一端与岸基组件连接。
4.根据权利要求2所述的水下潜航器,其特征在于,所述摄像组件包括集成腔体,所述集成腔体嵌于所述浮力舱体,所述集成腔体内部中空,分为灯光室和摄像室,所述集成腔体连接一接口组件,所述接口组件连接所述控制舱体;所述灯光室内设有灯光组件,所述摄像室内设有摄像头。
5.根据权利要求1所述的水下潜航器,其特征在于,所述推进器包括水平推进器和竖直推进器,每个所述第一通道对应设有一个所述竖直推进器,每个所述第二通道对应设有一个所述水平推进器;
6.根据权利要求1所述的水下潜航器,其特征在于,所述顶面设有凹陷区域和预留接口,所述底面设有预留接口和第三声纳或dvl,
7.根据权利要求6所述的水下潜航器,其特征在于,所述检测组件包括水深传感器,所述水深传感器与所述控制舱体连接,所述水深传感器用于检测水下潜航器所处的水下深度。
8.根据权利要求6所述的水下潜航器,其特征在于,所述凹陷区域内设有吊钩、把手、牺牲阳极和真空测试快速堵头;
9.根据权利要求1所述的水下潜航器,其特征在于,所述控制舱体设有支撑架和支撑面,所述支撑架与所述支撑面连接,所述支撑面与所述推进器的支撑环连接;
10.根据权利要求9所述的水下潜航器,其特征在于,所述推进器还包括壳体、桨叶组件和密封轴套,所述壳体与所述支撑环固定连接,所述密封轴套内部为密封腔体,所述密封轴套内部设有减速组件,所述密封轴套的首端伸入所述桨叶组件中,所述密封轴套与所述桨叶组件之间通过动密封件连接,所述密封轴套的尾端与所述壳体固定连接,所述密封轴套与所述壳体的接触面之间设有静密封件;所述壳体内部为密封腔体,所述壳体内部设有动力组件,所述动力组件的输出轴连接所述减速组件,所述减速组件与所述桨叶组件传动连接。
技术总结本发明涉及水下机器人技术领域,公开了一种水下潜航器,包括控制舱体和浮力舱体,浮力舱体的外表面为流线型,浮力舱体包裹所述控制舱体,浮力舱体的顶面和底面分别与周面之间光滑过渡;周面为外凸的流线型表面,周面的前后侧光滑内凹形成第一区域,左右侧光滑内凹形成第二区域,探测组件设于第一区域或第二区域;顶面设有第一通道贯通,第一区域和第二区域之间设有第二通道,第一通道和第二通道内设有所述推进器。本发明通过将控制舱体和推进器包裹进流线型的浮力舱体中减少水下运动时的阻力,相同推力下可以实现更快地运动速度。并且在流线型的浮力舱体设置对称内凹的区域用作探测组件的安装位置,减小了外部探测组件的阻力干扰。技术研发人员:胡刚毅,陈新伯,梁浩杨受保护的技术使用者:广东蓝潜海洋技术有限公司技术研发日:技术公布日:2024/5/8本文地址:https://www.jishuxx.com/zhuanli/20240722/224349.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表