一种跨海空介质两栖水下漫射衰减系数观测装置
- 国知局
- 2024-08-01 06:37:18
本技术属于水下机器人设备制造,具体涉及一种跨海空介质两栖水下漫射衰减系数观测装置和方法。
背景技术:
1、光在海水中的传播过程易受到诸如有色溶解有机物、浮游植物、非藻类颗粒物以及纯水等的影响,进而改变水下光场。生物光学参数用于描述和表征海水中生态过程对水下光场的影响,通过建立光学特性和水体中生物参数的联系,为从光学手段了解水体中生态过程提供了有效依据。水下漫射衰减系数作为一个重要的海洋生物光学参数对于理解海洋上层热交换、浮游植物光合作用及初级生产力、开阔大洋和近岸海域的水体浑浊度等海洋物理和生物过程非常重要。
2、在自然水体中,通过将辐照度探头垂直安放于各种观测平台并获取不同深度下行辐照度,进而计算得出水下漫射衰减系数的剖面变化,水下漫射衰减系数的观测需要满足以下几个条件:1、辐照度探头需要保持垂直状态,观测平台尽量保持自由落体运动趋势,z轴方向的偏转角度不超过5度;2、辐照度探头需尽量设置于观测平台顶部以减少观测平台造成的光信号干扰;3、需要控制光学观测平台尽量远离船只,以避免船体阴影影响观测结果。现有技术中国内外通常使用美国seabird公司生产的profiller ii,其将下行辐照度探头集成在具备导流双翼自由落体平台上,水下数据通讯和回收靠连接电缆,然而该技术面临以下不足:1.在风力和流力较小时进行布放,观测平台很难向外漂移远离船只,进而影响数据观测质量;2.仪器回收时需要依赖手动拖拽拉回甲板,费时费力;3.在近海浅水水域使用时由于很难控制下落速度与深度,故仪器触底并损伤探头的风险很大。因此,需要针对目前观测方式和平台进行进一步改进和优化。
技术实现思路
1、为了解决现有技术存在的上述问题,本实用新型目的在于提供一种跨海空介质两栖水下漫射衰减系数观测装置,无需缆拖拽布放,能够自动布放与回收,精准的对指定水域进行剖面观测,省时省力,在水下能够保持自由落体的水平姿态,减少船体阴影干扰。
2、本实用新型所采用的技术方案为:
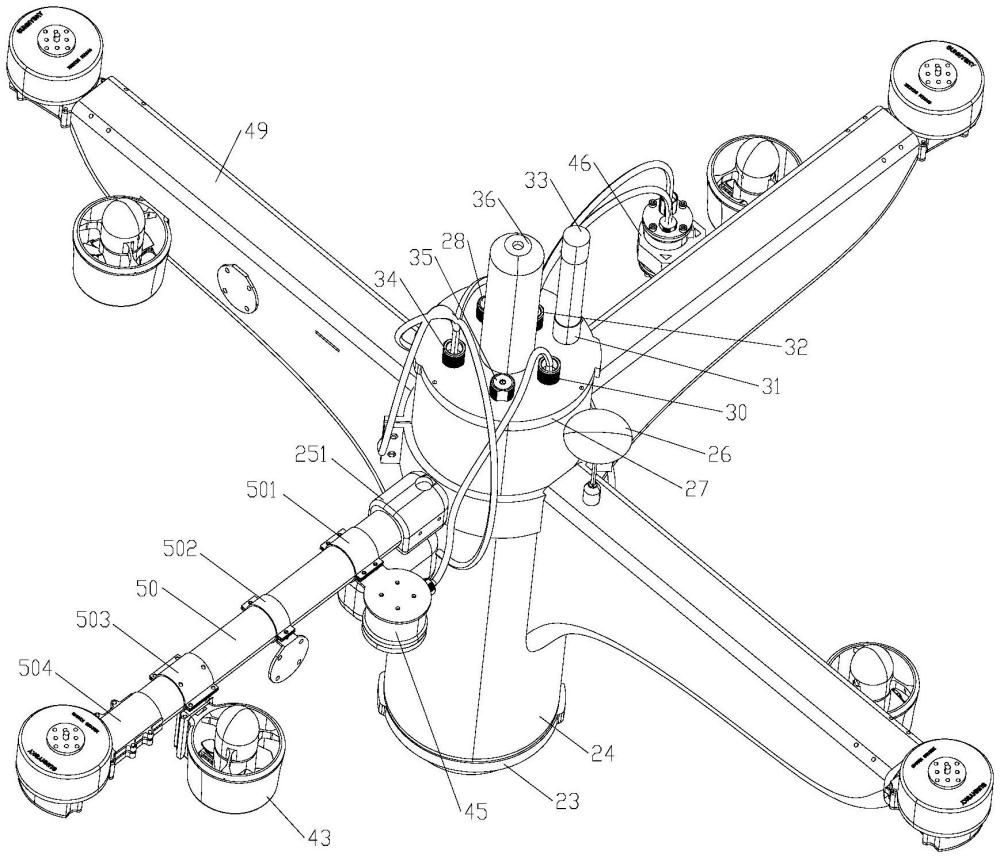
3、一种跨海空介质两栖水下漫射衰减系数观测装置,包括有密封的机身,机身外部固定设置有gps追踪模块、位置检测模块和多根机臂,机身内部设置有电气控制装置、气压控制装置、微型电脑和数据传输遥控模块,机身顶部设置有光学探头;每根机臂分别设置有浮力装置和推进装置;
4、所述电气控制装置用于驱动气压控制装置调节浮力装置的浮力实现上浮,或者驱动推进装置实现下潜;
5、所述机臂用于安装飞行旋翼以实现飞行;
6、所述光学探头用于测量采样不同深度位置的下行辐照度数据信息;
7、所述微型电脑用于根据光学探头的数据信息进行运算处理;
8、所述数据传输模块用于根据gps追踪模块的信号将运算处理后的数据信息传送至地面控制中心。
9、进一步地,所述机身包括有密封壳体,壳体上套设有机臂固定件;机臂固定件上设置有位置和数量与机臂的位置和数量适应的多个机臂固定座;
10、每根机臂外部分别套设有浮力套,浮力套的根部与机臂的根部同时固定连接于机臂固定座上。
11、进一步地,每个浮力套分别设置有浮力调节腔,且每个浮力套为由具有浮力的材料通过一次成型工艺构成的流线型整体结构;浮力套构成浮力装置。
12、进一步地,每根所述机臂分别贯穿设置于每个浮力套的上部,每根机臂伸出至浮力套外部的外端用于安装飞行旋翼;
13、每个浮力套的内端面中部设置浮力调节腔,每个浮力调节腔内分别设置有气囊,每个气囊分别通过高压气管连通至机身内部的气压控制装置。
14、进一步地,所述位置检测模块包括有至少一个声呐测距模块和至少一个深度传感器;
15、至少一根所述机臂上还设置有照明装置;
16、每根所述机臂均为圆杆结构,每根机臂上分别设置有多个抱箍,浮力套上对应于每个抱箍的位置分别设置有槽口;
17、所述声呐测距模块、照明装置和推进装置分别通过转接件固定连接至相应抱箍上。
18、进一步地,所述壳体为圆柱筒形结构,壳体顶端设置有上密封法兰,光学探头沿竖直方向设置于上密封法兰的顶面中部;
19、上密封法兰的顶面上环绕光学探头的位置用于设置防水开关、深度传感器、多个穿线螺栓和数据传输遥控模块的防水天线;
20、所述防水开关、gps追踪模块、声呐测距模块、推进装置和照明装置均通过穿线螺栓连接至机身内部的电气控制装置。
21、再进一步地,所述壳体底端通过下密封法兰密封连接有透明罩,机身内腔底部设置有云台摄像头,所述云台摄像头用于录像拍照以记录数据采集过程。
22、再进一步地,所述机身内腔设置有支撑架,所述支撑架包括有多根竖向支撑柱和多层水平方向的支撑板,电气控制装置、气压控制装置、微型电脑和数据传输遥控模块均通过多层支撑板支撑设置于机身内腔。
23、再进一步地,所述气压控制装置包括有耐压储气罐和隔膜真空气泵,耐压储气罐经隔膜真空气泵连接至浮力装置;所述隔膜真空气泵用于将耐压储气罐内的气体输送至浮力装置内,或者将浮力装置内的气体抽吸回输至耐压储气罐内。
24、最后,所述电气控制装置包括有气路及推进器控制模块,所述gps追踪模块、位置检测模块、推进装置、光学探头和照明装置均连接至气路及推进器控制模块;
25、所述气路及推进器控制模块用于根据gps追踪模块、位置检测模块和光学探头采集的数据信息,驱动气压控制装置、推进装置和照明装置的工作运行状态。
26、本实用新型的有益效果为:
27、一种跨海空介质两栖水下漫射衰减系数观测装置,通过机身内部的电气控制装置驱动气压控制装置调节浮力装置的浮力实现上浮,或者驱动推进装置实现下潜;通过机臂安装飞行旋翼以实现飞行;通过光学探头采样不同深度位置的下行辐照度数据信息;微型电脑根据光学探头的数据信息进行运算处理衰减系数(kd);数据传输模块根据gps追踪模块的信号将运算处理后的数据信息传送至地面控制中心;相较于传统依赖线缆拖拽的布放方式,能够精准的对指定水域进行剖面观测,有效控制观测平台远离船只以减少船体阴影干扰;采用无人机平台可实现自动布放与回收,省时省力,并且在系统出水时第一时间将预处理的观测数据传回基站,具有更好的时效性;在水下自由落体时保持水平姿态的同时可控制自由落体速度与深度,实现对浅水水域的剖面观测。
技术特征:1.一种跨海空介质两栖水下漫射衰减系数观测装置,其特征在于:包括有密封的机身,机身外部固定设置有gps追踪模块、位置检测模块和多根机臂,机身内部设置有电气控制装置、气压控制装置、微型电脑和数据传输遥控模块,机身顶部设置有光学探头;每根机臂分别设置有浮力装置和推进装置;
2.根据权利要求1所述跨海空介质两栖水下漫射衰减系数观测装置,其特征在于:所述机身包括有密封壳体,壳体上套设有机臂固定件;机臂固定件上设置有位置和数量与机臂的位置和数量相适应的多个机臂固定座;
3.根据权利要求2所述跨海空介质两栖水下漫射衰减系数观测装置,其特征在于:
4.根据权利要求2所述跨海空介质两栖水下漫射衰减系数观测装置,其特征在于:每根所述机臂分别贯穿设置于每个浮力套的上部,每根机臂伸出至浮力套外部的外端用于安装飞行旋翼;
5.根据权利要求2所述跨海空介质两栖水下漫射衰减系数观测装置,其特征在于:
6.根据权利要求5所述跨海空介质两栖水下漫射衰减系数观测装置,其特征在于:所述壳体为圆柱筒形结构,壳体顶端设置有上密封法兰,光学探头沿竖直方向设置于上密封法兰的顶面中部;
7.根据权利要求5所述跨海空介质两栖水下漫射衰减系数观测装置,其特征在于:所述壳体底端通过下密封法兰密封连接有透明罩,机身内腔底部设置有云台摄像头,所述云台摄像头用于录像拍照以记录数据采集过程。
8.根据权利要求1所述跨海空介质两栖水下漫射衰减系数观测装置,其特征在于:所述机身内腔设置有支撑架,所述支撑架包括有多根竖向支撑柱和多层水平方向的支撑板,电气控制装置、气压控制装置、微型电脑和数据传输遥控模块均通过多层支撑板支撑设置于机身内腔。
9.根据权利要求1所述跨海空介质两栖水下漫射衰减系数观测装置,其特征在于:所述气压控制装置包括有耐压储气罐和隔膜真空气泵,耐压储气罐经隔膜真空气泵连接至浮力装置;所述隔膜真空气泵用于将耐压储气罐内的气体输送至浮力装置内,或者将浮力装置内的气体抽吸回输至耐压储气罐内。
10.根据权利要求5所述跨海空介质两栖水下漫射衰减系数观测装置,其特征在于:所述电气控制装置包括有气路及推进器控制模块,所述gps追踪模块、位置检测模块、推进装置、光学探头和照明装置均连接至气路及推进器控制模块;
技术总结本技术跨海空介质两栖水下漫射衰减系数观测装置,机身内部的电气控制装置驱动气压控制装置调节浮力装置的浮力实现上浮,或者驱动推进装置实现下潜;机臂安装飞行旋翼实现飞行;光学探头采样下行辐照度数据信息和测量衰减系数(KD);微型电脑根据光学探头的数据信息进行运算处理,数据传输模块根据GPS追踪模块的信号将数据信息传送至地面控制中心;能够精准的对指定水域进行剖面观测,有效控制观测平台远离船只以减少船体阴影干扰;可实现自动布放与回收,省时省力;在系统出水时第一时间将预处理的观测数据传回基站,具有更好的时效性;在水下自由落体时保持水平姿态并可控制自由落体速度与深度,以对浅水水域的剖面进行观测。技术研发人员:胡水波,邬国锋,刘帅伟受保护的技术使用者:深圳大学技术研发日:20231008技术公布日:2024/5/9本文地址:https://www.jishuxx.com/zhuanli/20240722/224484.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表