一种翻倒可自主复位的遥控渔船的制作方法
- 国知局
- 2024-08-01 06:38:56
本技术涉及遥控船投放器设备,尤其涉及一种翻倒可自主复位的遥控渔船。
背景技术:
1、渔民在捕鱼之前一般都需要投放饵料或者拉投渔网,因此就有了能够遥控水上作业船只。遥控船不仅能够把鱼饵鱼食运送到指定地点,渔网抛洒到一定区域中。但是目前市场上的这种遥控船虽然已经实现了上述功能,但是续航能力极其有限,目前现有的渔船作用有限单一,并无防险抗阻能力,在遇到水浪或者障碍物迫使渔船侧翻或者翻倒时候就无法自主复位继续工作,严重影响水上作业的持续性和效率,无法实现其他功能性作用,因此,亟须在技术上进行改进,特此我们设计了一种翻倒可自主复位的遥控渔船来解决以上问题。
技术实现思路
1、本实用新型的目的在于提供一种翻倒可自主复位的遥控渔船,用以解决上述背景技术提出的问题。
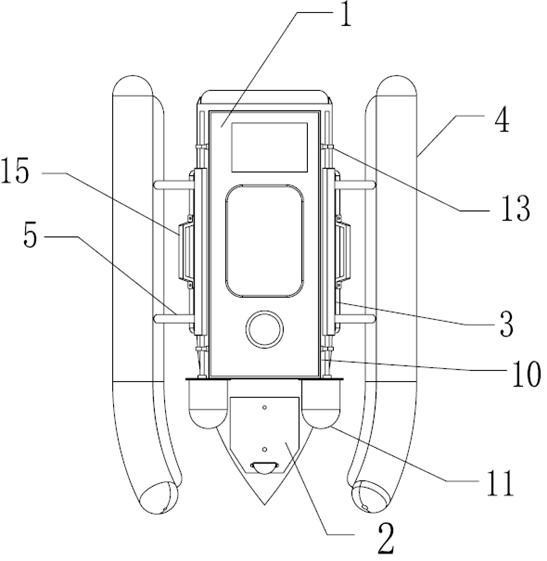
2、为实现上述目的,本实用新型提供如下技术方案:一种翻倒可自主复位的遥控渔船,包括遥控渔船船体,其特征在于,所述遥控渔船船体包括船身、感应控制装置、旋转执行机构、悬浮复位机构,所述感应控制装置设于所述船身顶部平面的船头位置处,所述旋转执行机构对称设置于所述船身顶部平面的两侧,所述感应控制装置与所述旋转执行机构电性连接,所述旋转执行机构通过牵引杆连接所述悬浮复位机构,所述悬浮复位机构对称设置于所述船身顶部平面的两侧,且可绕所述旋转执行机构在竖直平面上做弧形运动,并带动所述船身侧翻直至翻转复位。
3、优选地,所述感应控制装置内置于密封防水的腔室中,包括滑动金属模块、滑动杆、感应器、继电器,所述感应器与所述继电器电性连接,所述滑动金属模块在船身正置状态下轴心套设于所述滑动杆底部,所述滑动金属模块在船身翻倒状态下可滑动至所述滑动杆顶部,所述感应器固设于所述滑动杆顶部外的水平距离处。
4、进一步优选地,所述旋转执行机构包括伺服电机、旋转轴,所述伺服电机设置于所述圆柱形套筒内,与所述继电器电性连接,所述伺服电机上设有旋转驱动组件,所述伺服电机的底部连接所述旋转轴,所述旋转轴中部连接所述牵引杆。
5、进一步优选地,所述船身翻倒状态下的右侧所述旋转驱动组件设置的转动方向为顺时针转动,左侧所述旋转驱动组件设置的转动方向为逆时针转动。
6、进一步优选地,所述旋转轴的两端分别穿过固位组件,所述固位组件设于所述船身的竖直面板上。
7、优选地,所述悬浮复位机构的前部为弧形向前靠拢状,所述悬浮复位机构的后部为竖直状,且后部与所述牵引杆相连接。
8、进一步优选地,所述继电器设于所述感应控制装置的腔室内,数量为2个,分别与所述感应器电性连接。
9、优选地,所述船身的两侧设有提手部,所述船身的尾部设有渔网投放器,所述船身的后方底部设有螺旋桨和排水机构。
10、由于采取上述的技术方案,本发明的有益效果是:本实用新型采用翻倒可自主复位的遥控渔船,特别设计了感应控制装置在腔室内,防止被水浪浸湿短路,遥控渔船在正常投放渔网、鱼料等水上作业时效率正常,但在一般现有情况船体翻倒后往往无法继续工作,本设计能够在船体遭受外界干扰翻倒后及时触发感应控制装置,通过继电器连接旋转执行机构和悬浮复位机构,经过伺服电机上设有旋转驱动组件驱动,使得两侧悬浮复位机构的旋转摆动靠近后摆动分离,实现了船体在水上作业过程遇到水浪翻倒后能够迅速复位调整为正置的作用,结构设计科学合理,大幅度提高遥控渔船工作的持续性和高效性,实用性强。
技术特征:1.一种翻倒可自主复位的遥控渔船,包括遥控渔船船体,其特征在于,所述遥控渔船船体包括船身、感应控制装置、旋转执行机构、悬浮复位机构,所述感应控制装置设于所述船身顶部平面的船头位置处,所述旋转执行机构对称设置于所述船身顶部平面的两侧,所述感应控制装置与所述旋转执行机构电性连接,所述旋转执行机构通过牵引杆连接所述悬浮复位机构,所述悬浮复位机构对称设置于所述船身顶部平面的两侧,且可绕所述旋转执行机构在竖直平面上做弧形运动,并带动所述船身侧翻直至翻转复位。
2.根据权利要求1所述的一种翻倒可自主复位的遥控渔船,其特征在于,所述感应控制装置内置于密封防水的腔室中,包括滑动金属模块、滑动杆、感应器、继电器,所述感应器与所述继电器电性连接,所述滑动金属模块在船身正置状态下轴心套设于所述滑动杆底部,所述滑动金属模块在船身翻倒状态下可滑动至所述滑动杆顶部,所述感应器固设于所述滑动杆顶部外的水平距离处。
3.根据权利要求2所述的一种翻倒可自主复位的遥控渔船,其特征在于,所述旋转执行机构包括伺服电机、旋转轴,所述伺服电机设置于圆柱形套筒内,与所述继电器电性连接,所述伺服电机上设有旋转驱动组件,所述伺服电机的底部连接所述旋转轴,所述旋转轴中部连接所述牵引杆。
4.根据权利要求3所述的一种翻倒可自主复位的遥控渔船,其特征在于,所述船身翻倒状态下的右侧所述旋转驱动组件设置的转动方向为顺时针转动,左侧所述旋转驱动组件设置的转动方向为逆时针转动。
5.根据权利要求4所述的一种翻倒可自主复位的遥控渔船,其特征在于,所述旋转轴的两端分别穿过固位组件,所述固位组件设于所述船身的竖直面板上。
6.根据权利要求1所述的一种翻倒可自主复位的遥控渔船,其特征在于,所述悬浮复位机构的前部为弧形向前靠拢状,所述悬浮复位机构的后部为竖直状,且后部与所述牵引杆相连接。
7.根据权利要求2所述的一种翻倒可自主复位的遥控渔船,其特征在于,所述继电器设于所述感应控制装置的腔室内,数量为2个,分别与所述感应器电性连接。
8.根据权利要求1所述的一种翻倒可自主复位的遥控渔船,其特征在于,所述船身的两侧设有提手部,所述船身的尾部设有渔网投放器,所述船身的后方底部设有螺旋桨和排水机构。
技术总结本技术属于遥控船设备技术领域,公开了一种翻倒可自主复位的遥控渔船,遥控渔船船体包括船身、感应控制装置、旋转执行机构、悬浮复位机构,感应控制装置设于船身顶部平面的船头位置处,旋转执行机构对称设置于船身顶部平面的两侧,悬浮复位机构对称设置于船身顶部平面的两侧,且可绕旋转执行机构在竖直平面上做弧形运动,并带动船身侧翻直至翻转复位。在船体翻倒后,能够触发感应控制装置,通过继电器连接旋转执行机构和悬浮复位机构,经过悬浮复位机构的旋转摆动,结构设计科学合理,实现了船体在水上作业过程遇到水浪翻倒后能够迅速复位调整为正置的作用,大幅度提高遥控渔船工作的持续性和高效性,实用性强。技术研发人员:杨惠敏受保护的技术使用者:杨惠敏技术研发日:20230830技术公布日:2024/5/12本文地址:https://www.jishuxx.com/zhuanli/20240722/224602.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
水面光伏电站的制作方法
下一篇
返回列表