一种鱼雷回收装置的制作方法
- 国知局
- 2024-08-01 06:44:02
本发明涉及鱼雷回收,特别是涉及一种鱼雷回收装置。
背景技术:
1、科研试验与军事训练任务中会在相应水域投放鱼雷,任务完成后则需要对鱼雷进行回收,由于鱼雷属于高精密仪器,为了避免鱼雷产生损伤,鱼雷回收装置的可靠性、快捷性和环境适应性能显得至关重要。目前海上训练鱼雷的打捞作业仍然需要依靠人工下水作业回收,具体而言,打捞作业母船释放小型作业船艇,由至少两名操作人员驾驶小艇接近鱼雷,首先利用套环、夹具、长钩等工具手动捕捉鱼雷,随后利用绳索进行人工绑扎,然后将鱼雷拖拽至打捞作业母船舷侧吊机下方,对操雷进行横向姿态扶正(最佳起吊操雷姿态为横向),最后利用母船吊机吊运鱼雷将其回收至母船甲板,操作人员则在鱼雷回收后乘小艇回到母船。
2、人工作业对操作人员自身素质要求高、回收效率低;进一步的,人工作业时小艇不易控制,存在与鱼雷发生碰撞导致鱼雷损坏的风险;另外,鱼雷在海中会呈现横漂、竖漂、斜漂等多种姿态,将操雷横向抱紧捕捉最有利于回收,但人工扶正难度较大。因此,如何实现对鱼雷的自动化高效回收是目前亟需解决的问题。
技术实现思路
1、为解决上述技术问题,本发明的目的是提供一种鱼雷回收装置以实现对鱼雷的自动化回收与高效回收。
2、基于此,本发明提供了一种鱼雷回收装置,其包括:
3、承重主体;
4、抱紧扶正机构,设于所述承重主体上并与其铰接连接;
5、姿态扶正电机,设于所述承重主体上并与所述抱紧扶正机构相连接,所述抱紧扶正机构可在所述姿态扶正电机的驱动下绕其与所述承重主体的铰接轴转动;
6、轻质浮体,设于所述所述承重主体上并与其固定连接;
7、推进器,设于所述承重主体上并与其固定连接;
8、监控机构,设于所述承重主体上并与其固定连接,所述监控机构用于监测所述抱紧扶正机构的运动;
9、其中,所述抱紧扶正机构包括回收架和捕获手,所述捕获手成对设置于所述回收架的两侧以夹持所述回收架上的鱼雷。
10、本申请的一些实施例中,所述抱紧扶正机构包括伸缩杆,所述伸缩杆设有多个并与所述捕获手一一对应,所述伸缩杆的一端与所述回收架固定连接,所述伸缩杆的另一端与所述捕获手相连接,所述捕获手还与所述回收架铰接连接,
11、当所述伸缩杆伸长时位于所述回收架两侧的所述捕获手相互靠近以夹持所述回收架上的鱼雷,
12、当所述伸缩杆收缩时位于所述回收架两侧的所述捕获手远离所述回收架上的鱼雷。
13、本申请的一些实施例中,所述抱紧扶正机构还包括导向块,所述导向块设于所述回收架的一端并与其固定连接,所述导向块呈喇叭状设置。
14、本申请的一些实施例中,所述导向块的横截面呈u字形。
15、本申请的一些实施例中,所述回收架上设有辅助导轮,所述辅助导轮可带动鱼雷沿沿所述回收架的设置方向移动。
16、本申请的一些实施例中,所述辅助导轮设有若干个,各所述辅助导轮沿所述回收架的布置方向依次设置。
17、本申请的一些实施例中,所述轻质浮体设有两块,两块所述轻质浮体分别设于所述承重整体上并位于所述抱紧扶正机构的两侧。
18、本申请的一些实施例中,所述承重主体的侧面设有防碰抓手,所述防碰抓手设有若干个,各所述防碰抓手依次设于所述承重主体相对的两侧面上。
19、本申请的一些实施例中,所述承重主体上设有用于连接母船的收放线缆。
20、本申请的一些实施例中,所述承重主体上还设有与所述监控机构相连接的信号传输线缆。
21、本发明实施例提供的一种鱼雷回收装置,与现有技术相比,其有益效果在于:
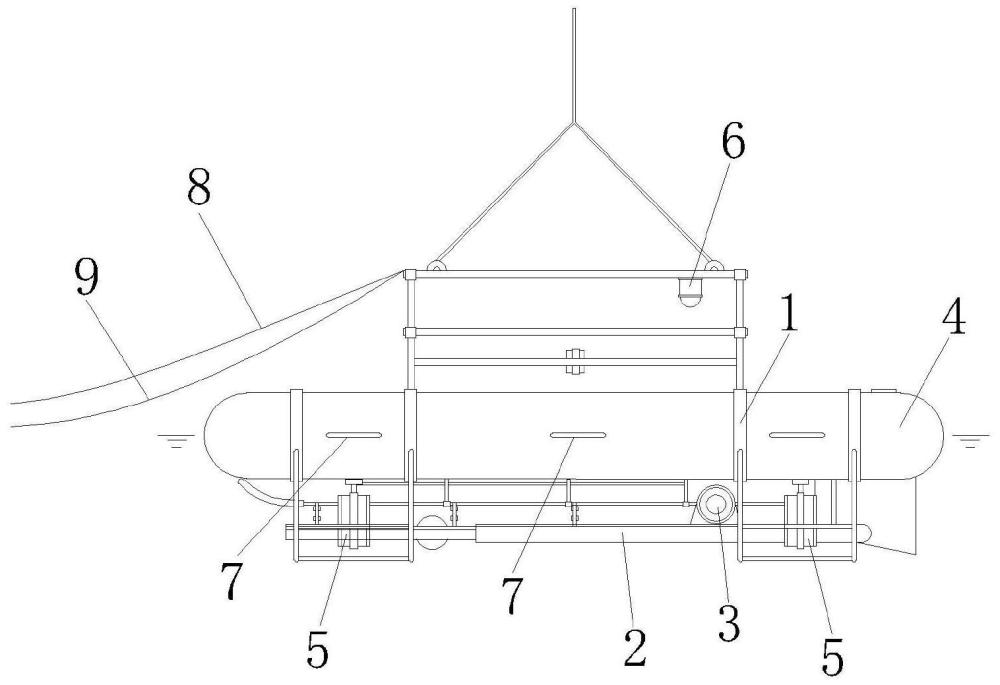
22、本发明提供了一种鱼雷回收装置,包括承重主体、抱紧扶正机构、姿态扶正电机、轻质浮体、推进器和监控机构。具体而言,抱紧扶正机构,设于承重主体上并与其铰接连接,姿态扶正电机则设于承重主体上并与抱紧扶正机构相连接,抱紧扶正机构可在姿态扶正电机的驱动下绕其与承重主体的铰接轴转动进而完成抱紧扶正机构的位置调节;轻质浮体设于承重主体上并与其固定连接,操作人员可通过向轻质浮体内充入空气或将轻质浮体内的空气放出以改变鱼雷回收装置受到的浮力大小;推进器设于承重主体上并与其固定连接,推进器用于驱动承重主体以及承重主体上的若干附属结构在水中运动以靠近或远离水中的鱼雷;监控机构设于承重主体上并与其固定连接,监控机构包含多个监控摄像头,其可通过视觉图像识别定位鱼雷的位置并在抱紧扶正机构的运动过程中对鱼雷回收装置进行监测以避免鱼雷回收装置的相应部件碰撞鱼雷;更进一步的,本申请的抱紧扶正机构包括回收架和捕获手,回收架为鱼雷的回收提供放置位,捕获手则成对设置于回收架的两侧以夹持回收架上的鱼雷进而确保鱼雷与回收架保持稳定。基于上述结构,使用时母船携带本申请的鱼雷回收装置靠近鱼雷,通过吊机将鱼雷回收装置释放至指定水域,随后启动监控机构定位鱼雷位置并确认鱼雷在水中的姿态情况,根据水中的鱼雷姿态属于横漂、竖漂或斜漂来决定是否需要调节抱紧扶正机构,当鱼雷位于竖漂和斜漂姿态时启动姿态扶正电机使抱紧扶正机构绕其与承重主体的铰接轴转动直至抱紧扶正机构与鱼雷相互平行,鱼雷位于横漂状态时水平设置的抱紧扶正机构则直接与鱼雷平行,确保抱紧扶正机构与鱼雷平行后启动推进器驱动承重主体和抱紧扶正机构靠近鱼雷并使得鱼雷落在回收架上,随后启动捕获手相互靠近进而实现对鱼雷的夹持,确认鱼雷已得到有效夹持后再次启动姿态扶正电机使抱紧扶正机构绕其与承重主体的铰接轴反向转动直至抱紧扶正机构回到初始状态(水平位置),最后将鱼雷捕捞装置重新吊装至母船,从而实现鱼雷的回收操作。如此,本申请通过设置可调节的鱼雷回收装置实现对鱼雷的全自动回收操作,避免了人工实地操作,显著提升了回收效率;鱼雷回收装置的抱紧扶正机构能够对各种姿态的鱼雷进行夹持与扶正,进而形成对操雷的良好保护,确保鱼雷在吊装过程中的完好无;另外,本申请的鱼雷回收装置适用于各类水域回收作业,满足高海况下的操雷回收作业,环境适应性强。
技术特征:1.一种鱼雷回收装置,其特征在于,包括:
2.根据权利要求1所述的鱼雷回收装置,其特征在于,所述抱紧扶正机构包括伸缩杆,所述伸缩杆设有多个并与所述捕获手一一对应,所述伸缩杆的一端与所述回收架固定连接,所述伸缩杆的另一端与所述捕获手相连接,所述捕获手还与所述回收架铰接连接,
3.根据权利要求1所述的鱼雷回收装置,其特征在于,所述抱紧扶正机构还包括导向块,所述导向块设于所述回收架的一端并与其固定连接,所述导向块呈喇叭状设置。
4.根据权利要求3所述的鱼雷回收装置,其特征在于,所述导向块的横截面呈u字形。
5.根据权利要求1所述的鱼雷回收装置,其特征在于,所述回收架上设有辅助导轮,所述辅助导轮可带动鱼雷沿沿所述回收架的设置方向移动。
6.根据权利要求1所述的鱼雷回收装置,其特征在于,所述辅助导轮设有若干个,各所述辅助导轮沿所述回收架的布置方向依次设置。
7.根据权利要求1所述的鱼雷回收装置,其特征在于,所述轻质浮体设有两块,两块所述轻质浮体分别设于所述承重整体上并位于所述抱紧扶正机构的两侧。
8.根据权利要求1所述的鱼雷回收装置,其特征在于,所述承重主体的侧面设有防碰抓手,所述防碰抓手设有若干个,各所述防碰抓手依次设于所述承重主体相对的两侧面上。
9.根据权利要求1所述的鱼雷回收装置,其特征在于,所述承重主体上设有用于连接母船的收放线缆。
10.根据权利要求1所述的鱼雷回收装置,其特征在于,所述承重主体上还设有与所述监控机构相连接的信号传输线缆。
技术总结本发明涉及鱼雷回收技术领域,公开了一种鱼雷回收装置,包括承重主体以及设于承重主体上的抱紧扶正机构、姿态扶正电机、轻质浮体、推进器和监控机构,抱紧扶正机构可在姿态扶正电机的驱动下绕其与承重主体的铰接轴转动以对齐鱼雷,轻质浮体为承重主体提供浮力,推进器可驱动承重主体以及上述附属结构在水中运动以靠近或远离鱼雷,监控机构通过图像识别定位鱼雷的位置并在抱紧扶正机构的运动过程中对其进行监测以避免触碰鱼雷。与现有技术相比,该鱼雷回收装置实现对鱼雷的全自动回收操作,避免了人工实地操作,显著提升了回收效率,同时由于无人操作,鱼雷回收装置适用于各类水域回收作业,满足高海况下的操雷回收作业,环境适应性强。技术研发人员:李文强,李明敏受保护的技术使用者:广州船舶及海洋工程设计研究院(中国船舶集团有限公司第六〇五研究院)技术研发日:技术公布日:2024/5/16本文地址:https://www.jishuxx.com/zhuanli/20240722/224839.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表