一种用于ROV水下作业的吸附装置的制作方法
- 国知局
- 2024-08-01 06:44:14
本发明属于水下作业,具体是涉及到一种用于rov水下作业的吸附装置。
背景技术:
1、水电站水工建筑物运行过程中,水下混凝土受大流量高速含砂水流冲蚀,会产生过流面冲坑、剥落等缺陷,结构缝变形挤压会造成缝边混凝土破损及缝内填充材料冲失,温度应力及结构受力会引起水下混凝土裂缝的问题。
2、目前,针对水电站水工建筑物的特点,结合日趋成熟的水下机器人(rov)技术,利用水下机器人,实现水电站水下缺陷检查,水下混凝土坑洞水下修补,水下混凝土结构缝破损水下注胶和水下混凝土裂缝水下灌浆等功能应用。但水下机器人进行上述水下作业时,存在作业反力、洋流力、抛料浮力等复杂工况,机器人无法稳定作业。
技术实现思路
1、本发明要解决的技术问题是提供一种用于rov水下作业的吸附装置,具备水下吸附功能,能够应对水下复杂工况,保证机器人水下作业的稳固性。
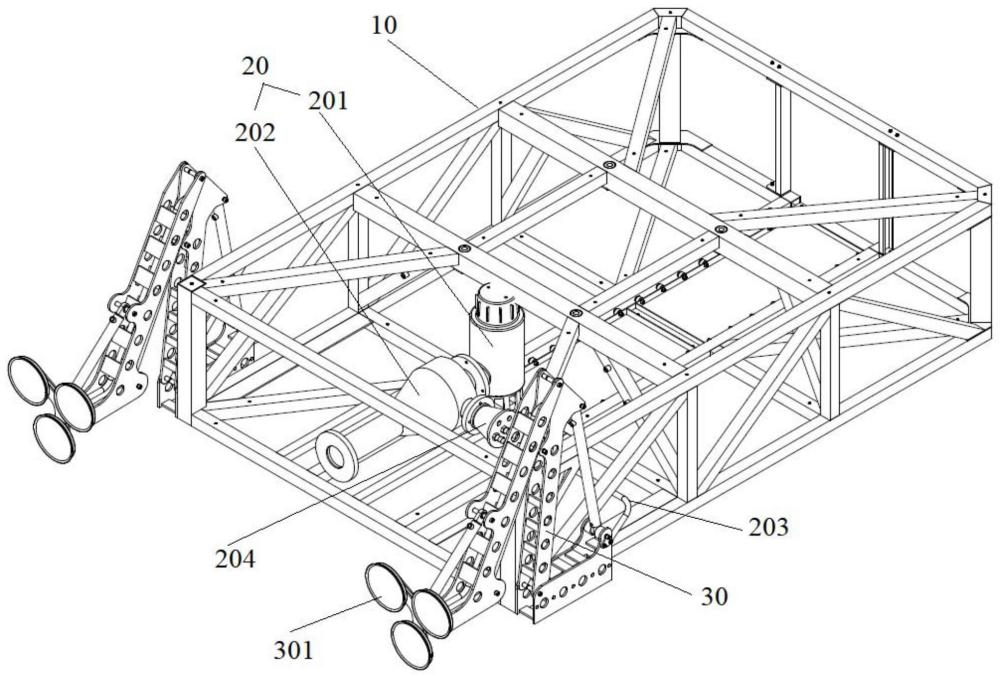
2、基于上述目的本发明提供的一种用于rov水下作业的吸附装置,包括:
3、架体,用于承载水下作业设备;
4、设置于架体上的负压产生机构,所述负压产生机构包括水泵、与水泵连接的射流器以及若干连接管,所述水泵的出口与射流器的进口连接,若干连接管与射流器的吸入口连接,所述射流器的吸入口能形成负压;以及
5、连接于架体一端的吸附机构,所述吸附机构包括若干吸盘;所述连接管与吸盘连接,所述负压产生机构运行能在吸盘与作业面间能形成负压。
6、可选地,所述吸附机构还包括:与架体刚性连接的至少两个折叠悬臂以及用于调整折叠悬臂姿态的伸缩组件,所述折叠悬臂与吸盘连接,所述折叠悬臂用于调整架体与作业面的角度和距离。
7、可选地,所述折叠悬臂包括:与架体刚性连接的连接臂一、与连接臂一的端部铰接的连接臂二、与连接臂二的端部铰接的连接臂三、两端分别与连接臂一和连接臂二铰接的直线伸缩件一、两端分别与连接臂二和连接臂三铰接的直线伸缩件二。
8、可选地,所述折叠悬臂还包括:两端分别与连接臂三和吸盘铰接的直线伸缩件三,所述连接臂三的端部与吸盘铰接。
9、可选地,所述直线伸缩件一、直线伸缩件二和直线伸缩件三为液压缸、电缸和气缸中的一种。
10、可选地,所述直线伸缩件一、直线伸缩件二和直线伸缩件三为液压缸,所述液压缸具有阻尼阀。
11、可选地,所述连接臂一、连接臂二和连接臂三均为框架结构或中空结构,所述连接管可依次穿过连接臂一、连接臂二和连接臂三与吸盘连接。
12、可选地,所述负压产生机构还包括连接头,所述连接头一端与多个连接管连通,另一端与射流器的吸入口通过法兰连接。
13、可选地,所述连接头呈喇叭状,所述连接头从靠近连接管一端至靠近射流器一端的直径逐渐变小。
14、可选地,所述吸盘包括橡胶材质的边璞和金属支撑结构。
15、本发明的有益效果是:本发明提供的用于rov水下作业的吸附装置,负压产生机构的水泵开启后,水流从射流器的出口喷出,射流器的吸入口会形成负压,通过连接管连通吸盘,在负压的作用将吸盘的水吸走,吸盘与作业面之间形成负压,使吸盘稳定吸附在坝体上,从而确保设置于架体上的机器人水下作业的稳定性;由于水泵的流量可控,使得吸盘的吸附力可调,从而可以适应不同条件的作业面;采用吸盘将水下机器人吸附在作业面上,保证了有效的吸附力克服斜坡面、水平面和直立面混凝土缺陷修补、灌浆等作业过程中产生的反作用力,避免造成水下机器人产生较大浮动或倾覆,保证下水机器人稳固作业。
技术特征:1.一种用于rov水下作业的吸附装置,其特征在于,包括:
2.根据权利要求1所述的用于rov水下作业的吸附装置,其特征在于,所述吸附机构(30)还包括:与架体(10)刚性连接的至少两个折叠悬臂以及用于调整折叠悬臂姿态的伸缩组件,所述折叠悬臂与吸盘(301)连接,所述折叠悬臂用于调整架体(10)与作业面的角度和距离。
3.根据权利要求2所述的用于rov水下作业的吸附装置,其特征在于,所述折叠悬臂包括:与架体(10)刚性连接的连接臂一(302)、与连接臂一(302)的端部铰接的连接臂二(303)、与连接臂二(303)的端部铰接的连接臂三(304)、两端分别与连接臂一(302)和连接臂二(303)铰接的直线伸缩件一(305)、两端分别与连接臂二(303)和连接臂三(304)铰接的直线伸缩件二(306)。
4.根据权利要求3所述的用于rov水下作业的吸附装置,其特征在于,所述折叠悬臂还包括:两端分别与连接臂三(304)和吸盘(301)铰接的直线伸缩件三(307),所述连接臂三(304)的端部与吸盘(301)铰接。
5.根据权利要求4所述的用于rov水下作业的吸附装置,其特征在于,所述直线伸缩件一(305)、直线伸缩件二(306)和直线伸缩件三(307)为液压缸、电缸和气缸中的一种。
6.根据权利要求5所述的用于rov水下作业的吸附装置,其特征在于,所述直线伸缩件一(305)、直线伸缩件二(306)和直线伸缩件三(307)为液压缸,所述液压缸具有阻尼阀。
7.根据权利要求3-6任一项所述的用于rov水下作业的吸附装置,其特征在于,所述连接臂一(302)、连接臂二(303)和连接臂三(304)均为框架结构或中空结构,所述连接管(203)可依次穿过连接臂一(302)、连接臂二(303)和连接臂三(304)与吸盘(301)连接。
8.根据权利要求1-6任一项所述的用于rov水下作业的吸附装置,其特征在于,所述负压产生机构(20)还包括连接头(204),所述连接头(204)一端与多个连接管(203)连通,另一端与射流器(202)的吸入口通过法兰连接。
9.根据权利要求8任一项所述的用于rov水下作业的吸附装置,其特征在于,所述连接头(204)呈喇叭状,所述连接头(204)从靠近连接管(203)一端至靠近射流器(202)一端的直径逐渐变小。
10.根据权利要求1-6任一项所述的用于rov水下作业的吸附装置,其特征在于,所述吸盘(301)包括橡胶材质的边璞和金属支撑结构。
技术总结本发明属于水下作业技术领域,具体是涉及到一种用于ROV水下作业的吸附装置,包括架体、负压产生机构和吸附机构,架体用于承载水下作业设备;负压产生机构包括水泵、与水泵连接的射流器以及若干连接管,水泵的出口与射流器的进口连接,若干连接管与射流器的吸入口连接,射流器的吸入口能形成负压;吸附机构包括若干吸盘;连接管与吸盘连接,负压产生机构运行能在吸盘与作业面间能形成负压,水泵开启水流从射流器的出口喷出形成负压,在负压的作用将吸盘的水吸走,使吸盘稳定吸附在坝体上,从而克服在斜坡面、水平面和直立面作业过程中产生的反作用力,避免造成水下机器人产生较大浮动或倾覆,保证下水机器人稳固作业。技术研发人员:肖荣,张定华,朱全平,严允,沈克,李新宇,涂绍平,王鸿飞,项立扬,张易,胡佩宝,宋俊辉,赵春禄,张中华,杨进,梁强,胡毅力,喻明,赵喆受保护的技术使用者:中国长江电力股份有限公司技术研发日:技术公布日:2024/5/16本文地址:https://www.jishuxx.com/zhuanli/20240722/224857.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表