一种监测海底电缆填埋深度的水下机器人及纠偏方法与流程
- 国知局
- 2024-08-01 06:44:04
本发明属于海底线缆检测,具体涉及一种监测海底电缆填埋深度的水下机器人及纠偏方法。
背景技术:
1、跨海岸、跨洲之间的通讯传输、电力传输等大都采用海底电缆(例如海底光缆)来传输,通常海底电缆被填埋在海底,由于海水的冲刷和船只的干扰,海底电缆会从海底层中裸露,裸露出来的海底电缆很可能受到破坏,或者继而产生电缆悬空的状态。
2、授权公告号为cn206057595u的中国专利公开了一种基于水下机器人的水下管线探测仪,包括水上控制装置、水下探测装置、脐带缆和绞车;水上控制装置通过脐带缆与水下探测装置进行通信连接;其中,脐带缆绕过该绞车与水下探测设备连接。所述水下探测装置设置在水下机器人上,用于探测海底电缆的位置及埋深;所述水上控制装置用于控制水下探测装置的工作。
3、但是上述公开的专利中仍存在有以下技术缺陷:在对管线进行检测的过程中,工作船会随着管道的铺设方向进行移动,由于工作船与水下机器人通过脐带缆实现软连接,从而使得水下机器人在移动过程中会产生位置的偏移,需要对水下机器人进行纠偏工作。
技术实现思路
1、本发明的目的在于克服上述现有技术的缺点,提供一种监测海底电缆填埋深度的水下机器人及纠偏方法,以解决现有技术中水下机器人在检测移动过程中会产生位置的偏移,难以完全按照设定方向移动的问题。
2、为达到上述目的,本发明采用以下技术方案予以实现:
3、一种监测海底电缆填埋深度的水下机器人,包括水下机器人本体,水下机器人本体的上端连接有第二连接绳,第二连接绳的顶端连接第一连接板,第一连接板上通过多组弹性组件连接有第二连接板,第二连接板的上端连接有第一连接绳,第一连接绳的上端和海上船体连接;
4、第一连接板上设置有压力传感器和倾角传感器;
5、多组弹性组件中的每一个弹性组件中设置有弹簧,弹簧的自由长度小于压力传感器的厚度;
6、所述水下机器人本体的每一侧设置有动力机构。
7、本发明的进一步改进在于:
8、优选的,所述多组弹性组件围绕第二连接板的周向等分设置,压力传感器设置在第一连接板的中间位置。
9、优选的,所述弹性组件包括导向杆,导向杆设置在第一连接板上,导向杆的顶端穿过第二连接板,导向杆的顶端连接有限位块;
10、弹簧套装在导向杆上。
11、优选的,水下机器人本体上端的侧边部设置有多个第一安装板,第一安装板平行与水下机器人本体的上端面;
12、第一安装板上转动连接有转轴,转轴的上端设置有发电设备,发电设备上贯穿设置有发电机转轴,发电机转轴的两端均沿环形阵列安装有多个叶片。
13、优选的,发电设备的上端固定连接有连接杆,连接杆的上端连接有转动板,转动板的长度方向垂直于发电机转轴的长度方向。
14、优选的,所述转轴通过转动座安装在第一安装板上。
15、优选的,水下机器人本体的前端面转动连接有摄像头。
16、优选的,所述水下机器人本体上端面的四个边各自安装有一个第二安装板,每一个第二安装板的外侧面安装有一个筒体,筒体的内部安装有水下电机,水下电机的外端部安装有螺旋桨。
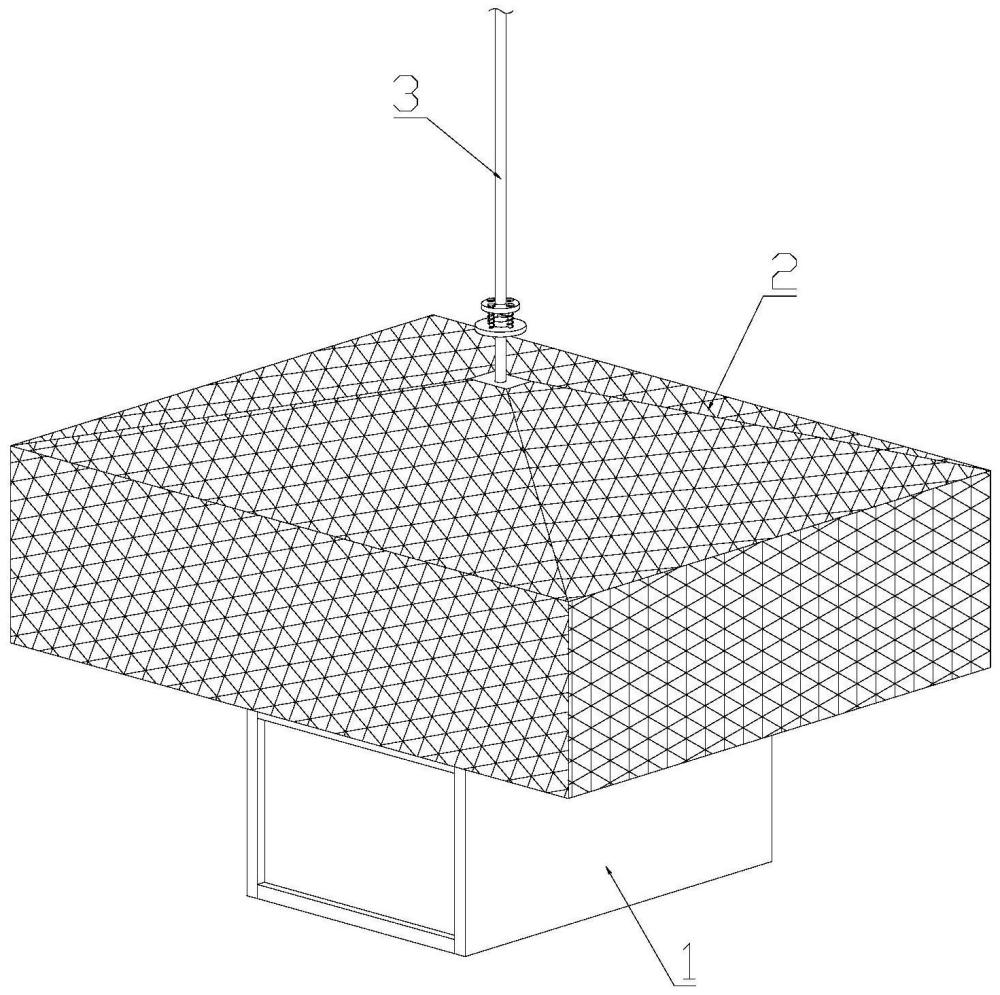
17、优选的,水下机器人本体设置在网罩内,所述网罩通过固定杆和机器人本体连接,固定杆的上端和第二连接绳连接。
18、一种基于上述监测海底电缆填埋深度的水下机器人的纠偏方法,压力传感器和倾角传感器实时检测;
19、当第一连接绳或第二连接绳松弛时,第二连接板在弹性组件的作用下和压力传感器接触;压力传感器将信号反馈至控制模块,控制模块控制海上船体的收线机构,收线机构将第一连接绳和第二连接绳拉至绷紧状态;
20、第一连接绳和第二连接绳绷紧状态下,当倾角传感器测量的第一连接板不再是水平方向时,则第一连接绳相对竖直方向向一侧倾斜,启动动力机构,对第一连接绳和第二连接绳纠偏,使第一连接板水平。
21、与现有技术相比,本发明具有以下有益效果:
22、本发明公开了一种监测海底电缆填埋深度的水下机器人,该装置在水下机器人本体上设置有固定杆,固定杆上连接有第一连接绳和第二连接绳,第一连接绳和第二连接绳之间通过两个连接板,以及设置在两个连接板之间的弹性组件连接,连接板上设置有压力传感器和倾角传感器,压力传感器能够检测出两个连接绳是否有松弛,倾角传感器能够检测出绷紧状态下的连接绳是否向某一侧偏移,连接绳组件在向某一侧偏移时,即启动与其偏移方向相反一侧的动力机构工作,可实现对连接绳组件的纠偏工作,使得连接绳组件处于竖直的状态,进而保证水下机器人本体始终处于海面船体的正下方位置;综上所述,本发明能够保证水下机器人本体始终处于海面船体的正下方,可实现自动对水下机器人本体的纠偏工作,提高检测效率。
23、进一步的,所述弹性组件围绕第二连接板的周向等分设置,使得能够为第一连接板和第二连接板提供均匀的连接力。
24、进一步的,每一个弹性组件设置有导向杆,通过导向杆的设置,一方面能够避免第一连接板和第二连接板相对倾斜,另一方面能够为弹簧的移动提供导向作用。
25、进一步的,水下机器人本体上设置有发电装置,利用水流的运动,将动能传递给叶片,叶片带动发电机转轴转动,使得该水下机器人能够利用自身发动的电能。
26、进一步的,发电设备上设置有转动板,通过转动板能够带动发电设备和发电机转轴转动,使得叶片能够最大为程度的被水流推动进而转动。
技术特征:1.一种监测海底电缆填埋深度的水下机器人,其特征在于,包括水下机器人本体(1),水下机器人本体(1)的上端连接有第二连接绳(17),第二连接绳(17)的顶端连接第一连接板(19),第一连接板(19)上通过多组弹性组件连接有第二连接板(18),第二连接板(18)的上端连接有第一连接绳(3),第一连接绳(3)的上端和海上船体连接;
2.根据权利要求1所述的一种监测海底电缆填埋深度的水下机器人,其特征在于,所述多组弹性组件围绕第二连接板(24)的周向等分设置,压力传感器(21)设置在第一连接板(19)的中间位置。
3.根据权利要求1所述的一种监测海底电缆填埋深度的水下机器人,其特征在于,所述弹性组件包括导向杆(20),导向杆(20)设置在第一连接板(19)上,导向杆(20)的顶端穿过第二连接板(24),导向杆(20)的顶端连接有限位块(25);
4.根据权利要求1所述的一种监测海底电缆填埋深度的水下机器人,其特征在于,水下机器人本体(1)上端的侧边部设置有多个第一安装板(5),第一安装板(5)平行与水下机器人本体(1)的上端面;
5.根据权利要求4所述的一种监测海底电缆填埋深度的水下机器人,其特征在于,发电设备(14)的上端固定连接有连接杆(26),连接杆(26)的上端连接有转动板(12),转动板(12)的长度方向垂直于发电机转轴(15)的长度方向。
6.根据权利要求4一种监测海底电缆填埋深度的水下机器人,其特征在于,所述转轴(11)通过转动座(10)安装在第一安装板(5)上。
7.根据权利要求1一种监测海底电缆填埋深度的水下机器人,其特征在于,水下机器人本体(1)的前端面转动连接有摄像头(4)。
8.根据权利要求1一种监测海底电缆填埋深度的水下机器人,其特征在于,所述水下机器人本体(1)上端面的四个边各自安装有一个第二安装板(6),每一个第二安装板(6)的外侧面安装有一个筒体(7),筒体(7)的内部安装有水下电机(9),水下电机(9)的外端部安装有螺旋桨(8)。
9.根据权利要求1一种监测海底电缆填埋深度的水下机器人,其特征在于,水下机器人本体(1)设置在网罩(2)内,所述网罩(2)通过固定杆(18)和机器人本体(1)连接,固定杆(18)的上端和第二连接绳(17)连接。
10.一种基于权利要求1所述监测海底电缆填埋深度的水下机器人的纠偏方法,其特征在于,压力传感器(21)和倾角传感器(22)实时检测;
技术总结本发明涉及海底线缆检测技术领域,具体为一种监测海底电缆填埋深度的水下机器人及纠偏方法,包括水下机器人本体;水下机器人本体通过连接绳组件与海上船体连接;水下机器人本体上设置有多个第二安装板,多个第二安装板上均固定有筒体,多个筒体上均安装有动力机构,动力机构包括螺旋桨和水下电机。本发明能够保证水下机器人本体始终处于海面船体的正下方,实现自动对水下机器人本体的纠偏工作,提高检测效率。技术研发人员:童博,赵勇,樊伟哲,赵剑剑,孟鹏飞,王新,高晨,张宝锋,张丽辉,宋子琛,王冰佳,朱尤省受保护的技术使用者:西安热工研究院有限公司技术研发日:技术公布日:2024/5/16本文地址:https://www.jishuxx.com/zhuanli/20240722/224842.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表