一种拖曳型无人帆船的航速和拖曳角计算方法和系统
- 国知局
- 2024-08-01 06:44:24
本申请属于拖曳型无人帆船快速性评估,更具体地,涉及一种拖曳型无人帆船的航速和拖曳角计算方法和系统。
背景技术:
1、基于自然能(风能、太阳能)的无人帆船拥有长航程、长续航、低人员风险的续航能力。另外,拖曳传感器因远离母船而显著减小来自母船自噪声的干扰;且因其被拖于船外,大小不受舰船尺寸的限制,可安装大量的水听器,提高目标探测能力。因此无人帆船搭配使用拖曳技术,可长时间大范围充分监测海洋中的声信息。在设计建造拖曳型无人帆船时,需要在前期进行包括航速、稳性、拖曳体姿态在内的帆船水动力性能评估,以确定帆船船长、吃水、风帆尺度、拖曳体设计拖深、绳索设计长度和设计航速等参数。
2、专利cn116227175a公开了一种帆船速度预测方法,该方法根据风帆受力、船舶阻力、船舵受力、船体受力及稳向板受力建立帆船保持稳定姿态航行时的平衡方程组,利用数值计算软件求解平衡方程组,得到帆船在预设风况下航行时的预测速度、预测舵角和预测航向角。
3、然而,该方法不包含拖曳体阻力,没有考虑拖曳体与无人帆船的耦合影响,无法评估拖曳型无人帆船航速与拖曳体姿态。
技术实现思路
1、针对现有技术的缺陷,本申请的目的在于提供一种拖曳型无人帆船的航速和拖曳角计算方法和系统,旨在解决现有方法没有考虑拖曳体与无人帆船的耦合影响,无法评估拖曳型无人帆船航速与拖曳体姿态的问题。
2、为实现上述目的,第一方面,本申请提供了一种拖曳型无人帆船的航速和拖曳角计算方法,包括:
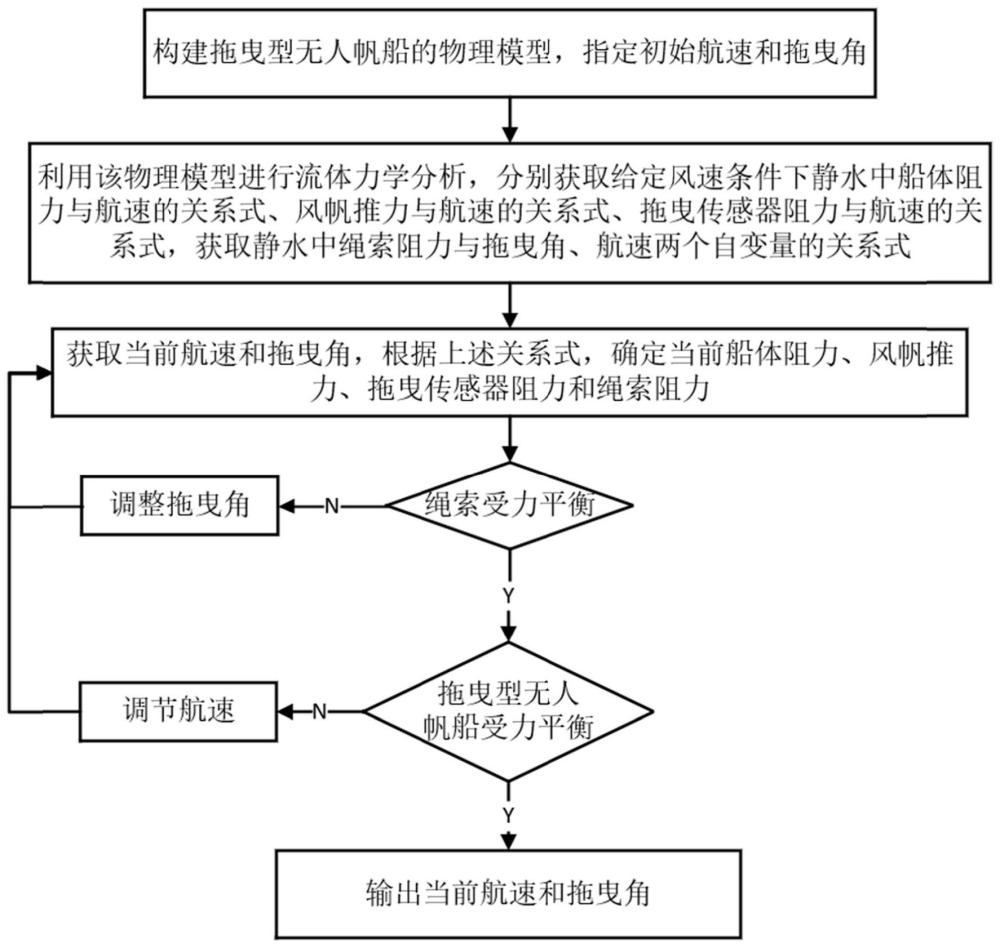
3、s1.构建拖曳型无人帆船的物理模型,指定初始航速和拖曳角;
4、s2.利用该物理模型进行流体力学分析,分别获取给定风速条件下静水中船体阻力与航速的关系式、风帆推力与航速的关系式、拖曳传感器阻力与航速的关系式,获取静水中绳索阻力与拖曳角、航速两个自变量的关系式;
5、s3.获取当前航速和拖曳角,根据上述关系式,确定当前船体阻力、风帆推力、拖曳传感器阻力和绳索阻力;
6、s4.判断绳索是否受力平衡,若是,进入s5,否则,调整拖曳角,再进入s3;
7、s5.判断拖曳型无人帆船是否受力平衡,若是,输出当前航速和拖曳角,否则,调节航速,再进入s3。
8、优选地,所述获取静水中绳索阻力与拖曳角、航速两个自变量的关系式,包括:
9、(1)选取若干拟速度,利用该物理模型进行流体力学分析,获得拖曳角为0°和90°时的绳索阻力,记为fc0和fc90;
10、(2)在一选定速度下,插值求得任意拖曳角下的绳索阻力:
11、fc=(aθ3+bθ2+cθ)fc90+fc0 ifθ∈[0°,70°]
12、fc=(dθ+e)fc90+fc0 ifθ∈(70°,90°]
13、其中,a,b,c,d,e均为插值系数,θ为拖曳角。
14、需要说明的是,上述优选方式可快速获得准确的在所述双循环迭代中所需的大量数据(即静水中绳索阻力、姿态与航速的关系),提高拖曳型无人帆船的最大航速与拖曳体姿态的预报效率。
15、优选地,绳索否力平衡的判断依据为:θ=arctan(gn/fc0),其中,θ为拖曳角,gn为绳索湿重,fc0为拖曳角为0°时的绳索阻力。
16、优选地,所述调整拖曳角的方式为:直接将arctan(gn/fc0)作为新的拖曳角θ。
17、优选地,拖曳型无人帆船受力平衡的判断依据为:t=fs+fc+fa,其中,f为风帆推力,fs为船体阻力,fc为绳索阻力,fa为拖曳型传感器阻力。
18、优选地,所述调节航速的方式为:若t>fs+fc+fa,按照预设量减小航速;若t<fs+fc+fa,按照预设量增加航速。
19、为实现上述目的,第二方面,本申请提供了一种拖曳型无人帆船的航速和拖曳角计算系统,包括:
20、至少一个存储器,用于存储程序;
21、至少一个处理器,用于进入所述存储器存储的程序,当所述存储器存储的程序被进入时,所述处理器用于进入如第一方面所述的方法。
22、为实现上述目的,第三方面,本申请提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,当所述计算机程序在处理器上运行时,使得所述处理器进入如第一方苗苗所述的方法。
23、可以理解的是,上述第二方面至第三方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
24、总体而言,通过本申请所构思的以上技术方案与现有技术相比,具有以下有益效果:
25、本申请提供一种拖曳型无人帆船的航速和拖曳角计算方法和系统,获得的帆船各部分(如船体、风帆、绳索等)的阻力与航速的关系,将绳索与拖曳传感器运动受力解耦,基于动力学方程内循环(拖曳角循环)迭代与外循环(航速循环)双迭代循环求解,能在预设风况条件下,预测拖曳型无人帆船的最大航速与拖曳体姿态,反馈前期设计的预期结果,为拖曳型无人帆船的主尺度设计(船长、吃水、风帆尺度)、水动力性能评估(包括航速、稳性、拖曳体姿态和阻力等)和优化提供数据支撑和指导。
技术特征:1.一种拖曳型无人帆船的航速和拖曳角计算方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,所述获取静水中绳索阻力与拖曳角、航速两个自变量的关系式,包括:
3.如权利要求1所述的方法,其特征在于,绳索受力平衡的判断依据为:θ=arctan(gn/fc0),其中,θ为拖曳角,gn为绳索湿重,fc0为拖曳角为0°时的绳索阻力。
4.如权利要求3所述的方法,其特征在于,所述调整拖曳角的方式为:直接将arctan(gn/fc0)作为新的拖曳角θ。
5.如权利要求1所述的方法,其特征在于,拖曳型无人帆船受力平衡的判断依据为:t=fs+fc+fa,其中,t为风帆推力,fs为船体阻力,fc为绳索阻力,fa为拖曳型传感器阻力。
6.如权利要求5所述的方法,其特征在于,所述调节航速的方式为:若t>fs+fc+fa,按照预设量减小航速;若t<fs+fc+fa,按照预设量增加航速。
7.一种拖曳型无人帆船的航速和拖曳角计算系统,其特征在于,包括:
8.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,当所述计算机程序在处理器上运行时,使得所述处理器进入如权利要求1至6任一项所述的方法。
技术总结本申请属于拖曳型无人帆船快速性评估技术领域,更具体地,涉及一种拖曳型无人帆船的航速和拖曳角计算方法和系统。通过本申请,获得的帆船各部分(如船体、风帆、绳索等)的阻力与航速的关系,将绳索与拖曳传感器运动受力解耦,基于动力学方程内循环(拖曳角循环)迭代与外循环(航速循环)双迭代循环求解,能在预设风况条件下,预测拖曳型无人帆船的最大航速与拖曳体姿态,反馈前期设计的预期结果,为拖曳型无人帆船的主尺度设计(船长、吃水、风帆尺度)、水动力性能评估(包括航速、稳性、拖曳体姿态和阻力等)和优化提供数据支撑和指导。技术研发人员:向先波,王浩天,向巩,杨少龙,王岩受保护的技术使用者:华中科技大学技术研发日:技术公布日:2024/5/16本文地址:https://www.jishuxx.com/zhuanli/20240722/224869.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表