一种水陆两栖智能救援船
- 国知局
- 2024-08-01 06:49:49
本技术涉及船舶设计与制造领域,具体的是一种水陆两栖智能救援船。
背景技术:
1、在救援过程中,及时性是救援的关键,而现有的救援工具往往不能更快的救援,存在救援缓慢、救援装备落后的情况,救援人员不能及时从陆地到水面实施救援。救援船救援具有及时性、高效性等特点,因此,救援者需要通过救援船对被救援者进行救援,但现有技术的救援船往往不能实现陆地到水面的完美转换,螺旋桨不能360度旋转,进而影响救援速度。例如:救援船在路面上时,很难及时进入水中,救援船在没有信号的区域,难以辨别方向。
技术实现思路
1、本实用新型的目的是提供一种水陆两栖智能救援船,既能在水中行驶救援,也可以在陆面行进。
2、本实用新型的技术方案是:
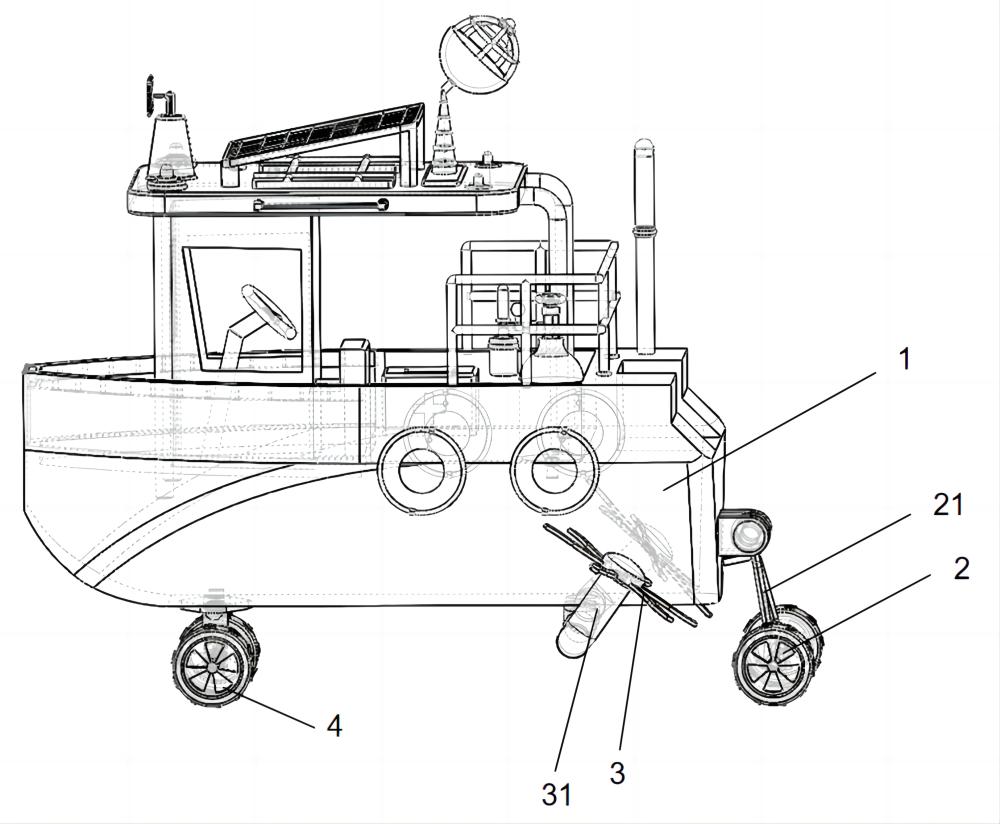
3、一种水陆两栖智能救援船,包括船体,其船体上设置有前驱动轮、后驱动轮、螺旋桨,所述螺旋桨由螺旋桨转动机构所连接,所述螺旋桨设有两组,分别设置于船体的两侧,所述船体内部装有螺旋桨驱动电机,所述螺旋桨驱动电机分别控制两组螺旋桨转动机构来实现360度转动,所述螺旋桨转动机构中装有电机来实现螺旋桨的转动,所述船体内设有旋转电机,旋转电机控制后驱动轮实现后轮旋转,所述船体前端设有前驱动轮。
4、螺旋桨转动机构能够通过螺旋桨驱动电机带动实现360度旋转,实现救援船的前进与后退,使救援船更快的到达救援现场,大大地减少了救援时间。
5、后驱动轮通过船体内部的旋转电机带动旋转,实现后驱动轮的上升与下降,从而实现陆地与水面的快速切换,同时所述后驱动轮轴与船体之间采用直形磁铁吸附实现后驱动轮的回正,能保证救援船在陆地上平稳行驶。
6、本实用新型通过在船体两侧设置驱动轮,使船体在陆地上行走,后驱动轮和前驱动轮采用空心结构,在陆地上能够使得驱动轮更加轻盈,在水面上能够减少水的阻力,使得救援船更加快速的到达救援现场。
7、通过测量在陆地上地面离船体的位置,来设置螺旋桨在船体两侧的位置,使船体即将进入水的时候,螺旋桨能够快速启动,来提高救援船的救援速度。
8、本实用新型中螺旋桨由圆形磁铁吸附控制,为可拆卸的,在螺旋桨不能正常使用时,能够及时更换螺旋桨。
技术特征:1.一种水陆两栖智能救援船,其特征在于:包括船体,其船体上设置有前驱动轮、后驱动轮、螺旋桨,所述螺旋桨由螺旋桨转动机构所连接,所述螺旋桨设有两组,分别设置于船体的两侧,所述船体内部装有螺旋桨驱动电机,所述螺旋桨驱动电机分别控制两组螺旋桨转动机构来实现360度转动,所述螺旋桨转动机构中装有电机来实现螺旋桨的转动,所述船体内设有旋转电机,旋转电机控制后驱动轮实现后轮旋转,所述船体前端设有前驱动轮。
2.根据权利要求1所述的水陆两栖智能救援船,其特征在于:所述前驱动轮采用空心结构设计,所述后驱动轮采用空心结构设计。
3.根据权利要求1所述的水陆两栖智能救援船,其特征在于:所述螺旋桨与螺旋桨转动机构之间由圆形磁铁吸附连接,为可拆卸的。
4.根据权利要求1所述的水陆两栖智能救援船,其特征在于:所述后驱动轮轴与船体之间采用直形磁铁吸附实现后驱动轮的回正。
技术总结本技术提供一种水陆两栖智能救援船,包括船体,其船体上设置有前驱动轮、后驱动轮、螺旋桨,所述螺旋桨由螺旋桨转动机构所连接,所述螺旋桨设有两组,分别设置于船体的两侧,所述船体内部装有螺旋桨驱动电机,所述螺旋桨驱动电机分别控制两组螺旋桨转动机构来实现360度转动,所述螺旋桨转动机构中装有电机来实现螺旋桨的转动,所述船体内设有旋转电机,旋转电机控制后驱动轮实现后轮旋转,所述船体前端设有前驱动轮。本技术的有益效果是由于采用上述技术方案,救援船可两栖行进,适用于大海等救援地点,具有结构简单,控制便捷,成本低,救援效率高等优点。技术研发人员:刘佳,赵东伟,王一淇,高珲,李开晟,张益豪,吴宇山受保护的技术使用者:辽宁工程技术大学技术研发日:20231103技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240722/225218.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表