基于内河港口船舶载重测算系统及测算方法与流程
- 国知局
- 2024-08-01 06:49:39
本发明涉及船舶载重,具体为基于内河港口船舶载重测算系统及测算方法。
背景技术:
1、船舶载重测算是指测算船舶装载货物、燃料、储备品、船员和乘客的总重量;一般计算公式为:载重量=满载排水量-空船排水量。
2、公开号为cn116127722a申请公开了一种船舶实时载重测算方法,涉及船舶载重测算技术;以三点检测法获取船舶的外围平均吃水深度;确定所述船舶的船舶漂心,根据所述船舶漂心与船舶的船舯之间的三角函数关系,获取船倾平均吃水深度;对所述船倾平均吃水深度进行加权修正处理,获取船舶平均吃水深度;根据所述船舶平均吃水深度确定插值区间,使用线性插值法对所述船舶的载重量进行计算;本发明对船舶重量的测量精确高;能够实时获得船舶载重,及时有效的评估船舶的能效水平,应用场景广泛。
3、船舶在进行载重测算过程中,一般只是基于其船舶边缘水线的变化,来确定其具体载重量,但此种确定方式存在时间差,且周边水源因时间差的存在,会导致其波浪出现变化,当波浪出现变化数值较大时,便会造成其船舶的载重量评定存在误差,导致其测算数值精准度存在问题,其测算精度无法得到保障。
技术实现思路
1、针对现有技术的不足,本发明提供了基于内河港口船舶载重测算系统及测算方法,解决了在进行载重测算过程中,未将其船舶周边波浪的高度差考虑在内,导致其测算数值精准度存在误差的问题。
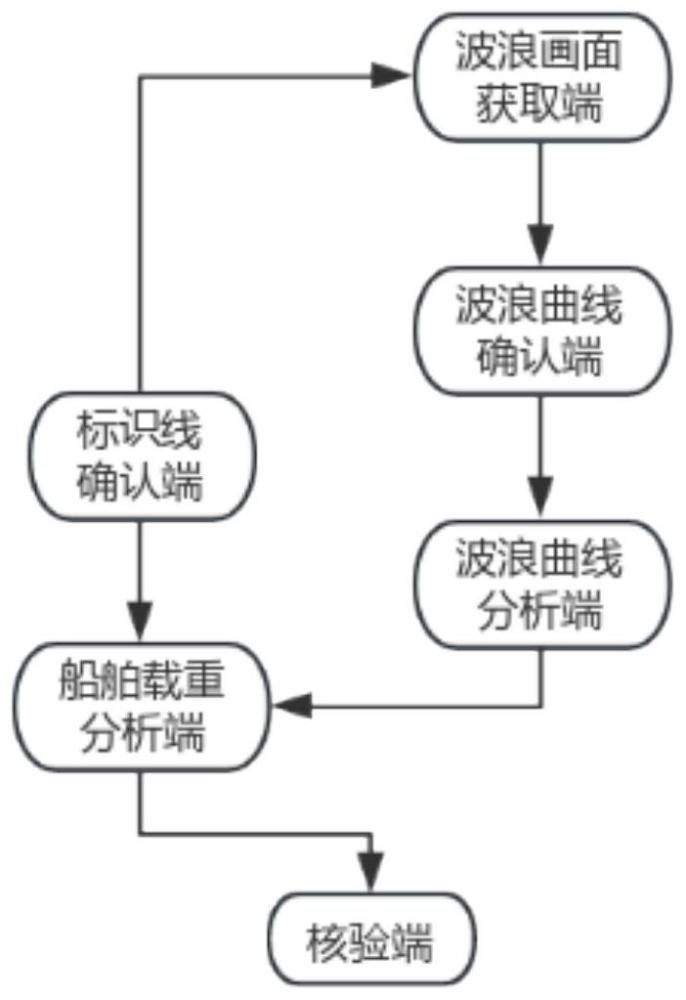
2、为实现以上目的,本发明通过以下技术方案予以实现:基于内河港口船舶载重测算系统,包括:
3、标识线确认端,对内河港口船舶外端面的标识线进行确认,标识线包括初始结合线和变化结合线;
4、标识线确认端,对船舶的初始结合线或变化结合线进行确认时,对其相同时刻的船舶边缘波浪图像进行获取;
5、波浪曲线确认端,基于所获取的船舶边缘波浪图像,对波浪的边缘轮廓进行确认,随后再基于所确认的边缘轮廓,生成其波浪图像的波浪边缘曲线,并将所生成的波浪边缘曲线传输至波浪曲线分析端内,包括:
6、基于此船舶边缘波浪图像,确认其波浪图像的亮度值,将整个图像的亮度值从最低逐步向上调节,确认此图像内边缘处亮度变化数值最低的区域,并确定此区域的外部轮廓线以及内部轮廓线;
7、基于外部轮廓线以及内部轮廓线,确认两组轮廓线之间的中心线,并按照中心线的具体走向以及结合二维坐标系,生成对应波浪图像的波浪边缘曲线;
8、波浪曲线分析端,对完成处理的波浪边缘曲线进行接收,通过确认本波浪边缘曲线的峰值波动点,判定其峰值波动点是否均一致,包括:
9、对波浪边缘曲线的峰值波动点进行确认,其峰值波动点前后两端线段趋势不一致,其峰值波动点前端线段走向趋势向上,处于爬升状态,且峰值波动点后端线段走向趋势向下,处于下降状态;
10、基于所确认若干个峰值波动点之间的具体高度参数,并标记为gi,其中i代表不同的峰值波动点,且i=1、2、……、n,将n个峰值波动点的高度参数gi进行标准差处理,确认其标准参b;
11、将标准参b与预设值y1进行比对,若b≤y1,将此曲线标定为趋势一致曲线,若b>y1,将此曲线标定为趋势不一致曲线;
12、若均处于一致状态,确认此曲线内部若干个高度参数gi的均值,将其标定为波浪高度值;
13、若未处于一致状态,则基于数值变化,确认波浪高度值:
14、确认相邻峰值波动点之间的水平横向距离以及高度参数,并按照数值从大至小的方式,对水平横向距离进行排序,生成距离序列,对高度参数进行排序,生成高度序列;
15、基于本波浪图像内最高峰值波动点的具体位置,确定其与船舶之间的距离l,确认本距离序列内相邻距离之间的数值变化规律,从最高峰值波动点开始,基于距离l,确认其到达其船舶最近峰值波动点的波动次数;
16、再基于高度序列内相邻高度之间的差值变化规律,并将高度序列的第一组高度值以及所确定的波动次数,确定其波浪高度值;
17、将初始结合线对应时刻所确认的波浪高度值标定为初始高度,将变化结合线对应时刻所确认的波浪高度值标定为变化高度,将初始高度以及变化高度传输至船舶载重分析端内;
18、船舶载重分析端,基于所确认的初始结合线或变化结合线,确认其初始线差,再基于所确认的初始高度以及变化高度,确认其两组线段之间的线差,并基于此线差确认其船舶的具体载重;
19、包括:
20、基于初始结合线以及变化结合线,确认两个线段的水平高度差,并将其标定为初始线差;
21、若初始高度>变化高度,则采用:初始高度-变化高度=差值,将初始线差与本差值进行求和,确认其总线差;
22、若初始高度=变化高度,则将此初始线差标定为总线差;
23、若初始高度<变化高度,则采用:初始高度-变化高度=差值,将初始线差与本差值进行求和,确认总线差;
24、采用zz=总线差×c1确认其船舶载重量zz,其中c1为预设的固定系数因子,并将所确认的具体载重量zz传输至外部显示端内进行显示。
25、优选的,基于内河港口船舶载重测算方法,包括:
26、对内河港口船舶外端面的标识线进行确认,其标识线包括初始结合线以及变化结合线;
27、确认船舶边缘波浪图像,并进行轮廓提取,生成其波浪图像的波浪边缘曲线;
28、基于对应的波浪边缘曲线内部的波动状态,确认其峰值波动点,判定其峰值波动点的变化是否一致,若一致,则直接确定其波浪高度值,若不一致,则通过其波浪的波形变化以及与船舶的相距距离,确认其波浪高度值;
29、基于所确认的初始结合线或变化结合线,确认其初始线差,再基于所确认的初始高度以及变化高度,确认其两组线段之间的线差,并基于此线差确认其船舶的具体载重。
30、本发明提供了基于内河港口船舶载重测算系统及测算方法。与现有技术相比具备以下有益效果:
31、本发明通过确认其船舶在载重时所出现的结合线,基于线段之间的数值变化,确认初始结合线和变化结合线;
32、再基于其船舶周边的波浪变化图像,确认其波浪变化曲线,再基于波浪变化曲线内部数值波动状态的具体变化,确认其波浪对应的峰值高度,再根据其波浪的点位变化,判定此波浪是否存在变化情况,若未存在变化情况,则直接确定对应的波浪高度,若存在变化情况,则基于曲线的数值走向以及具体变化,确定其对应的波浪高度;
33、基于结合线以及波浪高度,确定其更为准确的高度差,再基于此高度差来确定其船舶的具体载重,其确定的载重数值更为精准,其测算的整体效果更好。
技术特征:1.基于内河港口船舶载重测算系统,其特征在于,包括:
2.根据权利要求1所述的基于内河港口船舶载重测算系统,其特征在于,所述标识线由所设定的高清摄像头捕捉,且其结合线为水源与船舶外端面接触过程中最高位置处的结合线,其初始结合线为船舶未载重时的结合线,其变化结合线为船舶载重时的结合线。
3.根据权利要求1所述的基于内河港口船舶载重测算系统,其特征在于,所述波浪曲线确认端,生成波浪边缘曲线的子步骤包括:
4.根据权利要求1所述的基于内河港口船舶载重测算系统,其特征在于,所述波浪曲线分析端,判定其峰值波动点是否均一致的子步骤包括:
5.根据权利要求4所述的基于内河港口船舶载重测算系统,其特征在于,所述波浪曲线分析端,针对于此曲线为趋势一致曲线时,则确认此曲线内部若干个高度参数gi的均值,将其标定为波浪高度值。
6.根据权利要求4所述的基于内河港口船舶载重测算系统,其特征在于,所述波浪曲线分析端,针对于此曲线为趋势不一致曲线时:
7.根据权利要求1所述的基于内河港口船舶载重测算系统,其特征在于,所述船舶载重分析端,确认其初始线差包括:
8.根据权利要求7所述的基于内河港口船舶载重测算系统,其特征在于,所述船舶载重分析端,确认其船舶载重量包括:
9.基于内河港口船舶载重测算方法,该测算方法应用于权利要求1-7任一项所述的基于内河港口船舶载重测算系统内,其特征在于,包括:
技术总结本发明公开了基于内河港口船舶载重测算系统及测算方法,本发明涉及船舶载重技术领域,解决了在进行载重测算过程中,未将其船舶周边波浪的高度差考虑在内,导致其测算数值精准度存在误差的问题,本发明基于其船舶周边的波浪变化图像,确认其波浪变化曲线,再基于波浪变化曲线内部数值波动状态的具体变化,确认其波浪对应的峰值高度,再根据其波浪的点位变化,若未存在变化情况,则直接确定对应的波浪高度,若存在变化情况,则基于曲线的数值走向以及具体变化,确定其对应的波浪高度;基于结合线以及波浪高度,确定其更为准确的高度差,再基于此高度差来确定其船舶的具体载重,其确定的载重数值更为精准,其测算的整体效果更好。技术研发人员:李建红,古胜群,刘波受保护的技术使用者:湖南省港务集团有限公司技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240722/225207.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表