一种基于声光导引的水下机器人目标对接系统及方法
- 国知局
- 2024-08-01 06:48:24
本发明主要涉及水下目标定位回收领域,特别涉及一种基于声光导引的水下机器人目标对接系统及方法。
背景技术:
1、海洋观测网是融合了物理海洋、海洋化学、海洋地球物理等学科,解决深海、极端环境下高分辨率和实时获取海洋观测数据的观测网络。观测网传感器长期处于深海之中,且无法移动,难以对其进行周期性检定校准,故需要水下机器人(rov)携带自容式标准器对观测网传感器进行校准。在实际应用中,为了隔绝rov对自容式标准器的测量产生影响,rov在放下标准器后需远离一段距离,待标准器数据采集后再进行回收。
2、现有的技术中,对标准器的回收,一般采用安装有机械手的rov捕捉回收,而rov大多采用声学装置进行搜索、测向、测距,在近距离时,声信号数据更新频率较低,在对接时稳定性和精度较差,并且无法实时获取标准器的位置。
3、到目前为止,国内还没有一套完整的针对海洋观测网络传感器的原位校准装置,严重影响了海洋观测网络传感器的精度,为此我们提出一种基于声光导引的水下机器人目标对接系统及方法。
技术实现思路
1、针对上述现有技术中的缺陷,本发明提供了一种基于声光导引的水下机器人目标对接系统及方法,从而采用声光导引和声学通信的方式,实现rov多场景下对目标的布防和回收。
2、本发明所采用的技术方案如下:
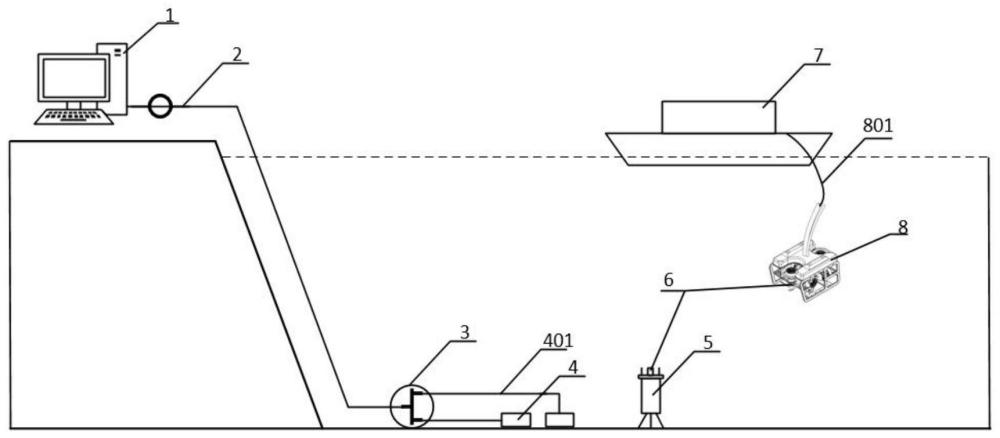
3、一种基于声光导引的水下机器人目标对接系统,包括rov,用于自容式标准器,声光导引装置。所述的rov具有全姿态控制,且装有机械爪和光照灯,用于抓取自容式标准器和照明。所述的自容式标准器包括多个标准水听器、标准温度计、标准磁传感器以及无磁电子仓和内部电子系统。所述的声光导引装置包含超短基线定位声纳、声学问询器、蓝绿光信标和一个水下摄像机。超短基线声纳、声学问询器和蓝绿光信标安装在自容式标准器上;另一组声学问询器设置在rov上方,水下摄像机设置在rov正前方。
4、本发明还公开了一种基于声光导引的水下机器人目标对接方法,包括以下步骤:
5、步骤一:将整套系统先放在浅海中,rov和自容式标准器进行握手通信,建立水声通信链路,根据接收信号幅度自动配置收发合置换能器的功率,然后通过通过第一收发合置换能器、第二收发合置换能器和超短基线声纳收发指令,按照声光导引的全流程进行测向和测距,如果测距结果连续3次小于距离门限,打开蓝绿光信标,进入声学和光学并行导引状态。如果水箱测试结果正常,通过声学问询器发送指令,关闭超短基线声纳的声光导引功能,进入水声通信状态。
6、步骤二:rov沉底后,由于静水压变化很大,rov布放自容式标准器前需要对声光导引系统进行状态进行如上测试。
7、步骤三:rov将自容式标准器放置在待校传感器附近后,远离该区域。
8、步骤四:在原位校准过程中,或者校准数据收集完成后,第一收发合置换能器和第二收发合置换能器进行握手通信,建立深海水声通信链路,并根据接收信号幅度自动配置功放的功率档和接收端放大倍率。
9、步骤五:如果要回收自容式标准器,第二收发合置换能器发送声学导引指令,第一收发合置换能器接收到该指令后,进入声学导引状态。
10、步骤六:以超短基线声纳为参考,测量第二收发合置换能器相对于超短基线声纳的方位,声学定位可以分解为测向和测距两个子模块,测向由超短基线声纳实现,并通过第一收发合置换能器把测向结果发送至第二收发合置换能器;测距由第一收发合置换能器实现,利用问询信号、应答信号的声传播时间、固定时延来估计斜距。母船的船基显控台收到方向、斜距、超短基线声纳航向等信息后,解算rov相对于自容式标准器的方位。rov操控人员根据声学定位结果调整rov的航向、航速、航深,逐渐靠近自容式标准器。
11、步骤七:如果rov上的第二收发合置换能器与第一收发合置换能器的距离连续3次小于距离门限,打开自容式标准器上的蓝绿光信标,进入声学和光学并行导引状态。
12、步骤八:rov抵近自容式标准器时,通过第二收发合置换能器发送指令,关闭自容式标准器的的声光导引功能,进入水声通信状态,同时rov上的机械手对自容式标准器进行回收。
13、本发明的有益效果如下:
14、1.系统具有自检和调节通信中信号的增益的功能,能够使得接收信号的信噪比处于较好的情况。
15、2.通过声学问询器,rov和自容式标准器之间进行通讯,能够把rov相对于自容式标准器的位置信息的实时反馈给操控人员。
16、3.在远距离处采用声学导引,利用超短基线声纳的高精准性,使得rov快速找到自容式标准器的位置。在近距离处采用声光联合导引,便于rov的机械臂精准抓取回收。
技术特征:1.一种基于声光导引的水下机器人目标对接系统,其特征在于:
2.如权利要求1所述的一种基于声光导引的水下机器人目标对接系统,其特征在于:自容式标准器(5)包括有标准温度计(501)、固定横架(502)、标准水听器(503)、标准磁传感器(504)、抓取支架(505)、无磁电子仓和内部电子系统(506)、底座(507);无磁电子仓和内部电子系统(506)位于自容式标准器(5)下方与底座(507)相连接,抓取支架(505)和固定横架(502)设置在无磁电子仓和内部电子系统(506)四周,标准温度计(501)、标准水听器(503)和标准磁传感器(504)设置在无磁电子仓和内部电子系统(506)上方。
3.如权利要求2所述的一种基于声光导引的水下机器人目标对接系统,其特征在于:所述的声光导引装置(6)包括第一收发合置换能器(601)、超短基线声纳(602)、声光导引装置安装顶盘(603)、蓝绿光信标(604)、水下摄像机(605)、第二收发合置换能器(606)。第一收发合置换能器(601)、超短基线声纳(602)通过声光导引装置安装顶盘(603)设置在自容式标准器(5)顶上。超短基线声纳(602)呈十字形分布均匀设置。蓝绿光信标(604)设置声光导引装置安装顶盘(603)下方,蓝绿光信标(604)共设置有15个,呈三角形分布,每面个5个。水下摄像机(605)和第二收发合置换能器(606)安装在rov(8)的正前方。
4.如权利要求3所述的一种基于声光导引的水下机器人目标对接系统,其特征在于:其中第一收发合置换能器(601)、超短基线声纳(602)、声光导引装置安装顶盘(603)、第二收发合置换能器606组成声学导引系统;蓝绿光信标(604)、水下摄像机(605)组成光学导引系统。
5.一种基于声光导引的水下机器人目标对接方法,其特征在于,包括以下步骤:
技术总结本发明主要一种基于声光导引的水下机器人目标对接系统及方法,目的在于解决现有的海洋观测网络传感器原位校准的布放和回收问题。本发明专利包括声光导引系统,用于导引ROV向自容式标准器;自容式标准器,用于采集标准数据;ROV,用于布放和回收自容式标准器等。ROV布放自容式标准器后离开,减少ROV对自容式标准器数据的干扰,后通过声光导引系统回收,实现海洋观测网的原位校准。技术研发人员:陶佳柯,焦君圣受保护的技术使用者:中国计量大学技术研发日:技术公布日:2024/5/27本文地址:https://www.jishuxx.com/zhuanli/20240722/225131.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表