一种履带式船舶清洗机器人的制作方法
- 国知局
- 2024-08-01 06:48:15
本发明涉及船舶清洗,尤其涉及一种履带式船舶清洗机器人。
背景技术:
1、近年来,随着我国航运业的发展,我国水路货运量不断上升。由于船舶长期在水中航行,水中的藻类、藤壶等大面积附着在船体上,对船舶运输造成严重不良影响。附着的海生物不仅会对船体造成伤害,而且会增加船舶航行的阻力,导致航运成本的增加,因此有必要对船舶表面进行定期清洗。
2、国内对船舶表面大多采用人工手持铲子等工具对船舶表面进行清理,作业效率低,且容易伤船漆,在较恶劣的天气也不能作业。近年来,随着科技的发展,船舶清洗机器人应运而生,但是以往的船舶清洗机器人存在以下问题,如行走机构可靠性低,履带容易卡海蛎子等影响履带正常运转;机器人两侧清洗盘转速不一致,两侧清洗效果差;机器人吸附性差,行走时容易脱离船舶表面。
技术实现思路
1、鉴于上述的分析,本发明实施例旨在提供一种履带式船舶清洗机器人,用以至少解决上述问题之一。
2、本发明提供了一种履带式船舶清洗机器人,包括:
3、履带行走机构,包括连接支架和分设于所述连接支架两侧的行走组件,所述行走组件的内侧设有挡板;
4、清洗机构,包括至少一组一一对应设置的清洗盘组件和清洗驱动组件;所述清洗盘组件位于所述行走组件之间,所述清洗驱动组件位于所述连接支架的上方;所述清洗盘组件包括旋转轴和喷管,所述旋转轴设有流体通道,所述流体通道被配置为能够将高压流体导向喷管用于清洗待清洗表面,所述喷管随所述旋转轴同步转动;所述清洗驱动组件被配置为至少能够为所述旋转轴提供部分驱动力,以及能够控制所述旋转轴的转速;所述高压流体与所述清洗驱动组件共同为所述旋转轴提供旋转动力。
5、进一步地,所述清洗机构还包括供流组件,所述供流组件被配置为至少能够为所述清洗盘组件提供用于清洗的高压流体;
6、所述供流组件包括进流管和至少一个连通管,所述连通管的一端与所述进流管连通,所述连通管的另一端与所述流体通道连通;
7、所述连通管的数量与所述清洗盘组件的数量相同,且所述连通管与所述清洗盘组件一一对应。
8、进一步地,所述清洗盘组件还包括清洗盘和连接缸体;
9、所述清洗盘罩设在所述喷管上;
10、所述连接缸体与所述清洗盘可拆卸连接;
11、所述旋转轴至少部分位于所述连接缸体内,所述旋转轴与所述连接缸体转动连接;所述旋转轴的一端与所述清洗驱动组件传动连接,所述旋转轴的另一端伸入所述清洗盘内与所述喷管连接;
12、优选地,所述连接缸体设有第一腔体以及与所述第一腔体连通的进流口,所述进流口与所述连通管连通;
13、所述旋转轴设有至少一个流体进口,所述流体进口与所述第一腔体、流体通道连通;
14、优选地,所述进流口的位置与所述旋转轴设有流体进口的位置相对应;
15、优选地,所述第一腔体设有供所述旋转轴两端穿过的第一连接口和第二连接口,所述旋转轴的侧壁分别与第一连接口、第二连接口动密封连接;
16、优选地,所述清洗盘组件包括多个喷管;所述旋转轴设有多个流体出口,所述流体出口的数量与所述喷管的数量相同,所述喷管与所述流体出口一一对应。
17、进一步地,所述旋转轴包括可拆卸连接的第一旋转部和第二旋转部,所述第一旋转部和所述第二旋转部共同限位出所述流体通道,所述流体进口开设在所述第一旋转部的侧壁,所述流体出口开设在所述第二旋转部的侧壁;
18、所述第一旋转部可拆卸设置在所述第一腔体内,所述第一旋转部的一端穿过所述第一连接口与所述清洗驱动组件传动连接,所述第一旋转部的另一端穿过所述第二连接口伸入所述清洗盘内与所述第二旋转部可拆卸连接;
19、所述第二旋转部位于所述清洗盘内,所述第二旋转部的顶端与所述第一旋转部可拆卸连接,所述流体出口开设在所述第二旋转部的侧壁;
20、优选地,所述第一旋转部设有与所述流体通道贯通的装配孔,所述装配孔的直径大于所述流体通道的直径;所述第一旋转部的侧壁与所述装配孔相对应的位置设有第一连接凸起;
21、所述第二旋转部的顶端与所述装配孔相配合,所述第二旋转部的顶端能够插入所述装配孔内;所述第二旋转部的侧壁设有与所述第一连接凸起相配合的第二连接凸起;
22、所述第二旋转部插入所述装配孔,所述第一连接凸起与所述第二连接凸起相贴合且可拆卸连接。
23、进一步地,所述清洗机构还包括连接主梁;
24、所述连接主梁包括中央装配部和至少一个支装配部,所述支装配部均匀布置在中央装配部的外侧,且支装配部与中央装配部的距离相同;
25、所述供流组件可拆卸安装于所述中央装配部;
26、所述支装配部的数量与所述清洗盘组件的数量相同,清洗盘组件、清洗驱动组件分别一一上下相对设置在支装配部。
27、进一步地,所述挡板向所述行走组件所在的方向投影能够完全覆盖所述行走组件,以备阻挡所述清洗机构清洗下来的杂物进入所述行走组件。
28、进一步地,所述行走组件包括驱动链轮、导向链轮、履带和装配主梁;
29、所述装配主梁的一端设有驱动链轮,所述装配主梁的另一端通过涨紧件设有导向链轮,且所述驱动链轮、导向链轮能够相对所述装配主梁转动;
30、所述履带套设在所述驱动链轮和所述导向链轮上,且所述履带与所述驱动链轮、导向链轮传动连接;
31、所述连接支架穿过所述挡板与所述装配主梁连接;
32、优选地,所述履带包括链轨部以及设置在所述链轨部外侧的履带板部,所述驱动链轮、导向链轮分别与所述链轨部啮合连接,所述链轨部带动所述履带板部同步转动;
33、优选地,所述行走组件还包括多个位于所述驱动链轮与所述导向链轮之间的支撑轮组;
34、所述支撑轮组与所述装配主梁转动连接,且与所述履带板部抵接;
35、所述支撑轮组包括两个相对设置的轮体,所述链轨部从所述支撑轮组的两个轮体之间穿过;
36、优选地,所述行走组件的外侧设有与所述履带相配合的履带浮板;
37、所述履带浮板与所述支撑轮组相对的位置设有开窗,以备将所述支撑轮组的外侧轮体露出;
38、优选地,所述履带浮板的上下侧边不超出履带板部的内侧壁。
39、进一步地,所述履带式船舶清洗机器人还包括主体支架;
40、所述主体支架包括平行设置的第一框架组件和第二框架组件,以及位于所述第一框架组件与所述第二框架组件之间的多个连接立柱;
41、所述主体支架还包括:
42、行走装配部,位于所述第二框架组件的底部,所述行走装配部被配置为可拆卸装配所述履带行走机构;所述连接支架可拆卸于第二框架组件的底部可拆卸连接,所述行走组件分设于所述第二框架组件的两侧;
43、清洗装配部,位于所述第一框架组件、第二框架组件之间,且位于所述主体支架的中央位置;所述清洗装配部被配置为能够可拆卸装配所述清洗机构;所述清洗盘组件的清洗盘位于第二框架组件的下方,所述清洗机构的连接主梁可拆卸设置于所述清洗装配部,所述清洗驱动组件从第一框架组件顶部穿出。
44、进一步地,所述第一框架组件包括第一外框和位于第一外框内的多个第一连接横梁;
45、所述第二框架组件包括第二外框和位于第二外框内的多个第二连接横梁;
46、所述第一外框、第二外框上下平行设置,所述第一连接横梁之间、第二连接横梁之间以及第一连接横梁和第二连接横梁之间均平行设置;
47、所述连接立柱的两端分别与第一框架组件、第二框架组件垂直连接;
48、优选地,所述第一外框、第二外框的形状分别为矩形框。
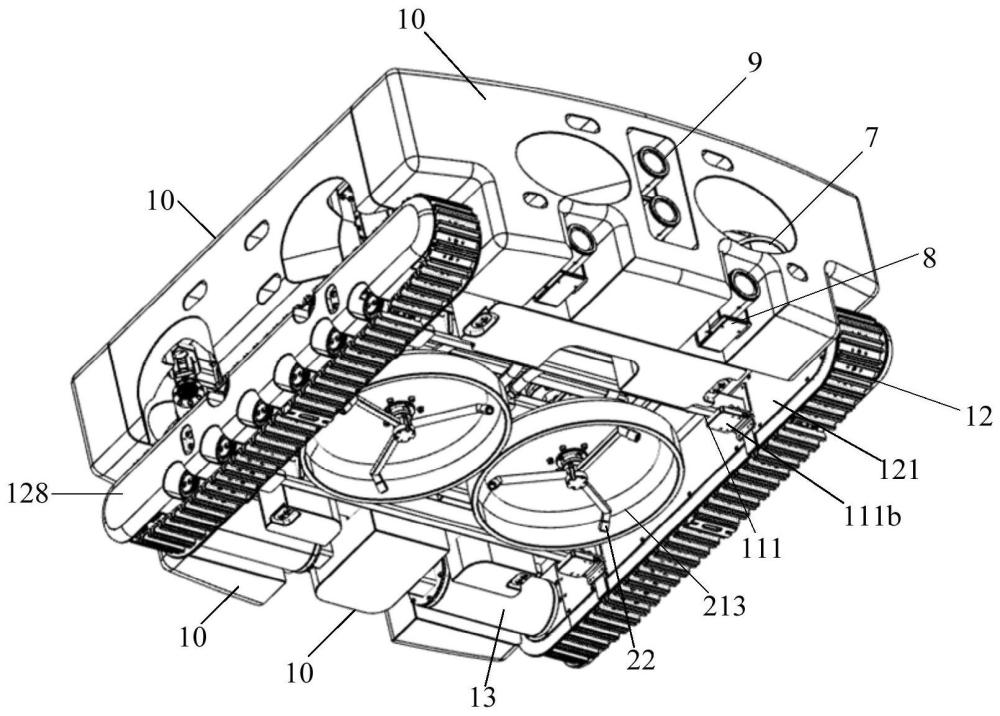
49、进一步地,所述履带式船舶清洗机器人还包括主控机构、传感机构、四个垂直推进器、四个水平推进器、照明灯和摄像头;
50、所述主体支架还包括:
51、主控装配部,被配置为能够可拆卸装配所述主控机构;所述主控装配部位于所述第一框架组件、第二框架组件之间,且位于所述清洗装配部的前侧;
52、传感装配部,被配置为能够可拆卸装配船所述传感机构;所述传感部位于所述第一框架组件、第二框架组件之间,且位于所述清洗装配部的后侧;
53、四个垂直推进装配架,被配置为能够可拆卸设置装配所述垂直推进器,使四个垂直推进器分别位于所述第一外框的四角内侧;所述垂直推进器的开口方向为竖直向上;
54、四个水平推进装配柱,被配置为能够可拆卸配置所述水平推进器,且使四个水平推进器分别位于所述第一外框的四角下方;所述水平推进装配柱被配置为能够使得水平推进器的推进方向与主体支架的前端面或后端面的夹角为45°,且前端的两个水平推进器的开口方向水平向前、向内倾斜45°,后端的两个水平推进器的开口方向水平向后、向内倾斜45°;
55、多个照明摄像支座,被配置为能够可拆卸装配照明灯或/和摄像头;所述照明摄像支座位于所述主体支架的前端和后端,以备履带式船舶清洗机器人的前后端均设有摄像头和照明灯。与现有技术相比,本发明至少可实现如下有益效果之一:
56、(1)通过在行走组件靠近清洗盘组件的一侧设置挡板,避免清洗机构清洗下来的杂物直接扩散至行走组件中(尤其能够避免船舶清洗机器人位于船舶侧壁时杂物在重力的作用下落入下侧的行走组件中),影响行走组件的正常运行,还避免杂物进入行走组件内对其内部件造成损坏,延长履带行走机构的使用寿命;
57、(2)通过清洗驱动组件准确控制旋转轴的转速,能够避免因高压流体压力过大导致喷管转速过快而损坏清洁表面,又能够避免因高压流体压力太小导致喷管转速过慢而导致清洗效果不佳,保证清洗机构的清洗效果;
58、(3)通过高压流体与清洗驱动组件共同驱动旋转轴的转动,合理利用高压流体对喷管产生的驱动力,不仅节能减排更绿色环保,而且避免清洗驱动组件体积过大增大清洗机构的配重和体积,降低清洗机构的使用范围和灵活度;
59、(4)通过主控装配部、清洗装配部和传感装配部将履带式船舶清洗机器人重量比较大的主控机构、清洗机构和传感机构依次可拆卸设置于第一框架组件和第二框架组件之间,通过行走装配部将船舶清洗机器人另一重量较大的行走机构可拆卸设置于第二框架组件下方,一方面,使得履带式船舶清洗机器人的结构更为紧凑,重量分布更均匀合理,能够有效减小履带式船舶清洗机器人的体积,提高履带式船舶清洗机器人的灵活度;另一方面,使得履带式船舶清洗机器人各机构实现模块化拆卸装配,便于模块化管理和后期维护;
60、(5)通过控制清洗驱动组件中电机的转速实现对喷管转速的精确控制,从而达到良好的吸附及清洗效果;此外,通过控制器能够保证所有清洗组件的清洗效果一致,使清洗装置具有均匀一致的清洗效果;
61、(6)本发明的结构紧凑、体积小,采用模块化设计,方便各个模块单独装配和调试,也便于维修和保养;喷头转速可控,吸附力可控,可保证较好的清洗效果,并改善清洗盘吸附船体的可靠性;
62、(7)清洗组件和清洗驱动组件通过连接主梁连接在一起,清洗驱动组件和高压水共同驱动清洗组件中旋转轴旋转,并可通过控制器或/和上位机监测其旋转状况,使其转速可按设定的速度旋转,进而调整清洗组件与待清洗表面的吸附力,同时也可克服由于高压水供水压力差异、两侧密封件磨损程度不一致等造成两侧旋转接头旋转速度不一致的弊端,从而可保证所有清洗组件的清洗效果一致。
63、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225119.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表