一种蛇形水下搜救机器人及使用方法
- 国知局
- 2024-08-01 06:50:07
本发明涉及海上救援,具体而言,尤其涉及一种蛇形水下搜救机器人及使用方法。
背景技术:
1、对于翻扣船遇险人员的救援,专业力量既要做好现场的海空立体搜救,也要结合实际开展水下搜救。水下搜救主要是考虑到,当船舶翻转速度过快时,翻扣船某些舱室内部空气未能在短时间内完全逸出,使得这类已没入水下的舱室在其自由液面之上可以形成空气层,为恰好困于其中(如生活区、机舱、货舱等)的幸存人员提供氧气,获得生还的可能。针对这种情形的水下搜救目前的几种常用方法,一是传统的敲击、喊话方式,这种方法穿透力有限,回声容易受到环境杂音的影响,辨别是否存在遇险人员精准度欠佳。尽管在小型船舶翻扣时响应效果较好,但是大型船舶或人员困于远离船底位置时响应效果无法有效保障,可能会影响发现遇险人员的几率。二是潜水员潜入翻扣船进舱搜寻,舱内一般通道狭小、漂浮杂物多、能见度差,如果障碍物未完全清除或移动物体绑扎不到位,救援通道容易堵塞,潜水员可能受困或被卡住供气管阻断供气,进而危及到救援人员的生命安全。三是某些情况下,考虑到恶劣的气象海况和本已不稳定的船舶浮态,若翻扣船发生进一步倾覆沉没,将对附近所有承担潜水、拖带、固定、搜寻、警戒任务的搜救力量带来安全风险,极易产生次生灾害。四是传统的敲击、喊话手段效率较低,有些时候甚至可能“无功而返”,耽误了黄金救援时间。被困人员长时间浸泡海水容易产生失温症状,导致意识模糊、昏迷,甚至死亡,一直处于幽暗封闭空间也会极大增加心理压力,时间越久越不利于被困人员存活。
技术实现思路
1、根据上述提出的技术问题,而提供一种蛇形水下搜救机器人及使用方法。
2、本发明采用的技术手段如下:
3、一种蛇形水下搜救机器人,包括依次相连的蛇头模块、运动平衡模块、前进动力模块、弯曲模块、控制模块、供电模块和蛇尾模块,各模块的外部为刚性或柔性的壳体,
4、所述蛇头模块集成有便于搜集信息的若干功能模块,
5、所述运动平衡模块用于调节机器人的前进位姿,
6、所述前进动力模块用于为机器人提供前进的动力,
7、所述弯曲模块用于调整机器人行进的路径,
8、所述蛇尾模块设置于机器人的末端,
9、所述蛇头模块和运动平衡模块、蛇尾模块的外部均设置有若干触觉传感器,
10、所述控制模块与蛇头模块的功能模块、运动平衡模块、前进动力模块以及各触觉传感器相连,基于各触觉传感器反馈的信号,控制运动平衡模块、前进动力模块完成机器人前进路径的调整。
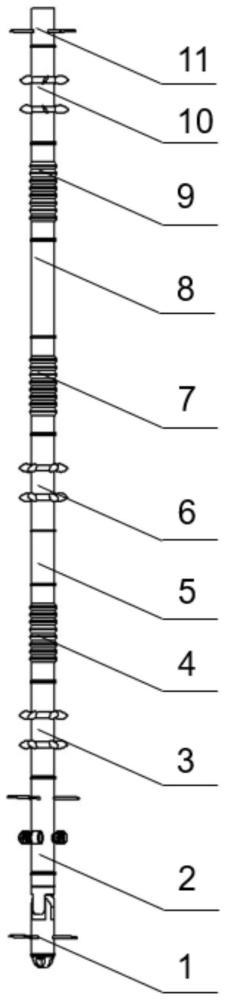
11、进一步地,所述前进动力模块和弯曲模块的数量为多个,具体包括第一前进动力模块、第一弯曲模块、第二前进动力模块、第二弯曲模块、第三弯曲模块和第三前进动力模块,蛇头模块与第一前进动力模块相连,第一前进动力模块和第一弯曲模块相连,所述第一弯曲模块和第二前进动力模块之间设置有控制舱,第二前进动力模块与第二弯曲模块相连,所述第二弯曲模块和第三弯曲模块之间设置有电池舱,所述第三弯曲模块和第三前进动力模块相连,所述第三前进动力模块的末端与蛇尾模块相连。
12、进一步地,所述控制舱为密封舱体结构,内部设置有支架和单片机,通过支架将单片机固定。
13、进一步地,所述电池舱为密封舱体结构,电池固定安装在电池舱体内部。
14、进一步地,所述蛇头模块内部的功能模块包括led灯、红外线扫描仪、摄像头和录音设备,所述蛇头模块的壳体为防水亚克力壳体。
15、进一步地,所述触觉传感器采用teng触觉传感器。
16、本发明还公开了上述所述蛇形水下搜救机器人的使用方法,包括如下步骤:
17、机器人基于前进动力模块提供前进动力,通过运动平衡模块调整机器人前进过程中的平衡性;
18、控制系统实时获取所述蛇头模块和运动平衡模块、蛇尾模块的触觉传感器反馈的信号,以进行舱内的避障和路径选择;
19、确认船舶内部的气室后,控制系统控制蛇头模块进入,控制系统控制摄像头,红外线扫描仪对受困人员进行搜索,并通过录音设备播放救援信息。
20、较现有技术相比,本发明具有以下优点:
21、1,本发明使用时,水下蛇形机器人可以通过模仿海蛇的形态通过翻扣船舶狭窄的舱室空间,将蛇形机器人的每个功能部分进行模块化设计,主要有蛇头模块,运动平衡模块,前进动力模块,控制模块,电池密封舱,蛇尾模块,并使用3个弯曲模块进行连接,每部分模块分工明确,安装和维修方便。
22、2,翻扣船舶对远程控制信号存在屏蔽作用,以及船舱室内空间复杂缆线可能发生缠绕,本发明采用自主巡航搜救模式,采用三组触觉传感器,分别安装在蛇头模块,控制模块和蛇尾模块,触觉传感器均采用teng柔性传感器,当水下蛇形机器人触碰到船舱内壁时,触觉传感器将信号传递到控制模块的控制单元,完成避碰转向,可实现自主在翻扣船舶内部进行被困人员搜救。
23、3,当水下蛇形机器人到达气室时,蛇头模块后方可向上弯曲的机械装置将蛇头模块向上弯曲抬出水面,蛇头模块内部包含led灯,红外线扫描仪,摄像头和录音设备,摄像头和红外线扫描仪对翻扣船舶内的气室进行扫描,确定是否有幸存人员,同时录音设备会播放提前录制好的救援播报,安抚被困人员情绪。
24、4,本发明的运动平衡模块外部安装四个固定方向的推进器,通过控制模块的控制单元合理分配四个推进器内部螺旋桨的旋转方向和速度,有效提升水下蛇形机器人的运动平衡性和灵活度。
25、基于上述理由本发明可在翻扣船舶救援领域广泛推广。
技术特征:1.一种蛇形水下搜救机器人,其特征在于,包括依次相连的蛇头模块、运动平衡模块、前进动力模块、弯曲模块、控制模块、供电模块和蛇尾模块,各模块的外部为刚性或柔性的壳体,
2.根据权利要求1所述的蛇形水下搜救机器人,其特征在于,所述前进动力模块和弯曲模块的数量为多个,具体包括第一前进动力模块、第一弯曲模块、第二前进动力模块、第二弯曲模块、第三弯曲模块和第三前进动力模块,蛇头模块与第一前进动力模块相连,第一前进动力模块和第一弯曲模块相连,所述第一弯曲模块和第二前进动力模块之间设置有控制舱,第二前进动力模块与第二弯曲模块相连,所述第二弯曲模块和第三弯曲模块之间设置有电池舱,所述第三弯曲模块和第三前进动力模块相连,所述第三前进动力模块的末端与蛇尾模块相连。
3.根据权利要求2所述的蛇形水下搜救机器人,其特征在于,所述控制舱为密封舱体结构,内部设置有支架和单片机,通过支架将单片机固定。
4.根据权利要求2所述的蛇形水下搜救机器人,其特征在于,电池固定安装在电池舱体内部。
5.根据权利要求1所述的蛇形水下搜救机器人,其特征在于,所述蛇头模块内部的功能模块包括led灯、红外线扫描仪、摄像头和录音设备,所述蛇头模块的壳体为防水亚克力壳体。
6.根据权利要求1所述的蛇形水下搜救机器人,其特征在于,所述触觉传感器采用teng触觉传感器。
7.一种权利要求1~6任一项所述蛇形水下搜救机器人的使用方法,包括如下步骤:
技术总结本发明涉及一种蛇形水下搜救机器人及使用方法,包括依次相连的蛇头模块、运动平衡模块、前进动力模块、弯曲模块、控制模块、供电模块和蛇尾模块,蛇头模块集成有便于搜集信息的若干功能模块,运动平衡模块用于调节机器人的前进位姿,前进动力模块用于为机器人提供前进的动力,弯曲模块用于调整机器人行进的路径,蛇头模块和运动平衡模块、蛇尾模块的外部均设置有触觉传感器,控制模块能够基于各触觉传感器反馈的信号,控制运动平衡模块、前进动力模块完成机器人前进路径的调整。本发明水下蛇形机器人根据仿生的原理进行设计,能够在翻扣的船舶内部舱室内搜索被困人员,每部分模块分工明确,安装和维修方便。技术研发人员:徐敏义,曹寻,郭原野,孙闻瑞,杨焱受保护的技术使用者:大连海事大学技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240722/225244.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表