一种无线控制水域无人巡逻船的制作方法
- 国知局
- 2024-08-01 07:04:49
本技术涉及无人船,具体为一种无线控制水域无人巡逻船。
背景技术:
1、无人艇是无人技术领域继无人机和无人车之后的又一重大研究领域。它集中了船舶设计、新型动力、信息采集处理、智能运动控制等高尖端技术。随着技术的成熟,在我国,海域辽阔,渔政执法工作难度大,为有效打击非法偷鱼、电鱼、毒鱼,遏制过度捕捞,保护海洋生态,需要利用无人巡逻船随时对海域进行值守和巡逻。
2、现有的自动巡逻船一般都是采用摄像头进行图像的采集,并通过5g和计算机技术对图像进行分析,识别无人艇巡逻查验装置所采集到的图像是否使得障碍物,起到自动避障的功能,但是,现有的巡逻船不能调节摄像头的高度,导致拍摄死角较多,影响图像采集效果,因此,亟需一种无线控制水域无人巡逻船来解决上述问题。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种无线控制水域无人巡逻船,具备多方位调节功能等优点,解决了现有的巡逻船不能调节摄像头的高度,导致拍摄死角较多,影响图像采集效果的问题。
3、(二)技术方案
4、本实用新型解决上述技术问题的技术方案如下:一种无线控制水域无人巡逻船,包括无人巡逻船主体,所述无人巡逻船主体的顶部固定安装有液压推杆,所述液压推杆的输出端上固定连接有安装板,所述安装板的内部活动连接有转动平台,所述转动平台的顶部固定连接有转动座,所述转动座的内部转动连接有高清摄像头,所述高清摄像头的背面固定连接有连接板,所述转动平台的顶部固定连接有电动推杆,所述电动推杆的输出端上转动连接有支撑杆,所述支撑杆远离电动推杆的一端转动连接有滑块,所述连接板的内部开设有滑槽,所述滑块滑动连接于滑槽的内部,所述转动平台的底部固定连接有传动套,所述无人巡逻船主体的顶部转动连接有传动转轴。
5、本实用新型的有益效果是:
6、该无线控制水域无人巡逻船,能够对高清摄像头的高度、方向和角度进行调节,减少拍摄死角,便于高清摄像头拍摄距离较近的场景,具备多方位调节功能的优点。
7、在上述技术方案的基础上,本实用新型还可以做如下改进。
8、进一步,所述传动转轴的侧壁上固定连接有传动滑块,所述传动套的内部开设有传动滑槽,所述传动滑块滑动连接于传动滑槽的内部。
9、采用上述进一步方案的有益效果是,传动转轴通过传动滑块带动传动套进行旋转,从而使传动套带动转动平台旋转,对高清摄像头的方向进行调节。
10、进一步,所述无人巡逻船主体的顶部固定安装有伺服电机,所述伺服电机的输出端上固定连接有蜗杆,所述传动转轴的外部固定连接有与蜗杆传动连接的蜗轮。
11、采用上述进一步方案的有益效果是,通过启动伺服电机使蜗杆带动蜗轮进行旋转,从而让蜗轮带动传动转轴进行旋转。
12、进一步,所述转动平台的外部固定连接有定位滑块,所述安装板的内部开设有定位滑槽,所述定位滑块滑动连接于定位滑槽的内部。
13、采用上述进一步方案的有益效果是,转动平台通过定位滑块进行限位,使转动平台稳定旋转。
14、进一步,所述无人巡逻船主体的顶部固定安装有照明灯,所述无人巡逻船主体的顶部固定安装有警示喇叭。
15、采用上述进一步方案的有益效果是,通过照明灯进行照明,保证光线充足,通过警示喇叭对非法捕捞人员进行警示。
16、进一步,所述安装板的顶部固定安装有警示灯,所述无人巡逻船主体的顶部固定连接有天线。
17、采用上述进一步方案的有益效果是,通过警示灯便于巡检人员快速观察到船体。
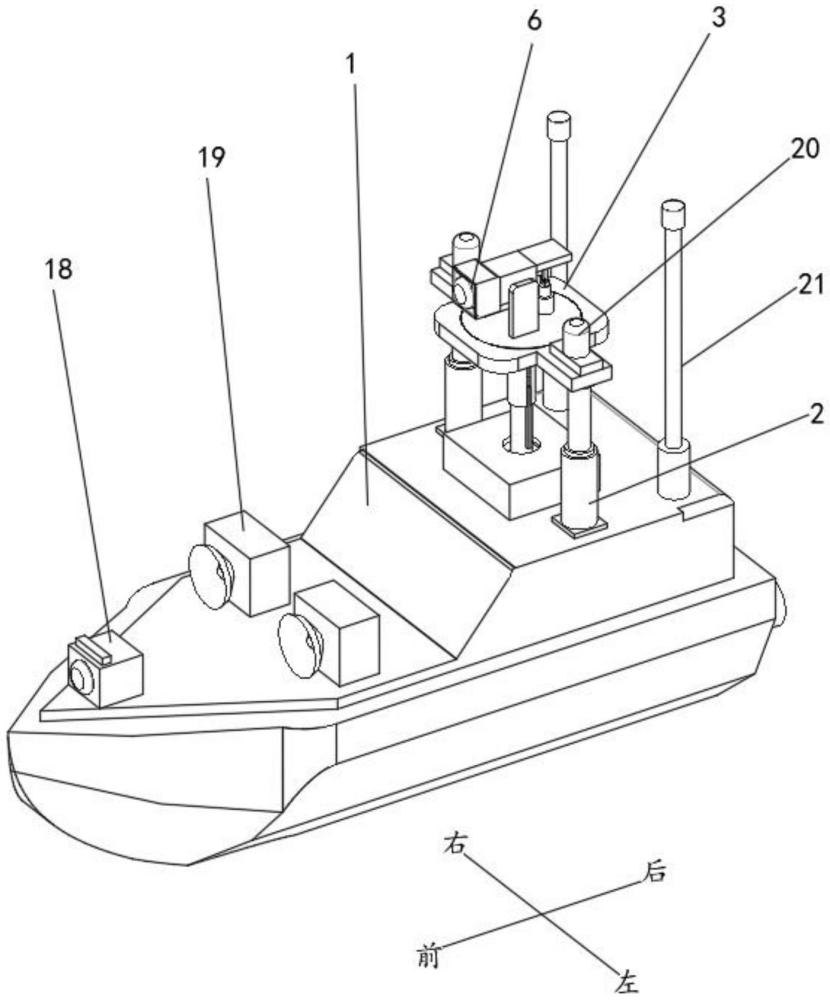
技术特征:1.一种无线控制水域无人巡逻船,包括无人巡逻船主体(1),其特征在于:所述无人巡逻船主体(1)的顶部固定安装有液压推杆(2),所述液压推杆(2)的输出端上固定连接有安装板(3),所述安装板(3)的内部活动连接有转动平台(4),所述转动平台(4)的顶部固定连接有转动座(5),所述转动座(5)的内部转动连接有高清摄像头(6),所述高清摄像头(6)的背面固定连接有连接板(7),所述转动平台(4)的顶部固定连接有电动推杆(8),所述电动推杆(8)的输出端上转动连接有支撑杆(9),所述支撑杆(9)远离电动推杆(8)的一端转动连接有滑块(10),所述连接板(7)的内部开设有滑槽,所述滑块(10)滑动连接于滑槽的内部,所述转动平台(4)的底部固定连接有传动套(11),所述无人巡逻船主体(1)的顶部转动连接有传动转轴(12)。
2.根据权利要求1所述的一种无线控制水域无人巡逻船,其特征在于:所述传动转轴(12)的侧壁上固定连接有传动滑块(13),所述传动套(11)的内部开设有传动滑槽,所述传动滑块(13)滑动连接于传动滑槽的内部。
3.根据权利要求1所述的一种无线控制水域无人巡逻船,其特征在于:所述无人巡逻船主体(1)的顶部固定安装有伺服电机(14),所述伺服电机(14)的输出端上固定连接有蜗杆(15),所述传动转轴(12)的外部固定连接有与蜗杆(15)传动连接的蜗轮(16)。
4.根据权利要求1所述的一种无线控制水域无人巡逻船,其特征在于:所述转动平台(4)的外部固定连接有定位滑块(17),所述安装板(3)的内部开设有定位滑槽,所述定位滑块(17)滑动连接于定位滑槽的内部。
5.根据权利要求1所述的一种无线控制水域无人巡逻船,其特征在于:所述无人巡逻船主体(1)的顶部固定安装有照明灯(18),所述无人巡逻船主体(1)的顶部固定安装有警示喇叭(19)。
6.根据权利要求1所述的一种无线控制水域无人巡逻船,其特征在于:所述安装板(3)的顶部固定安装有警示灯(20),所述无人巡逻船主体(1)的顶部固定连接有天线(21)。
技术总结本技术涉及无人船技术领域,且公开了一种无线控制水域无人巡逻船,包括无人巡逻船主体,所述无人巡逻船主体的顶部固定安装有液压推杆,所述液压推杆的输出端上固定连接有安装板,所述安装板的内部活动连接有转动平台,所述转动平台的顶部固定连接有转动座,所述转动座的内部转动连接有高清摄像头,所述高清摄像头的背面固定连接有连接板,所述转动平台的顶部固定连接有电动推杆,所述电动推杆的输出端上转动连接有支撑杆,所述支撑杆远离电动推杆的一端转动连接有滑块,所述连接板的内部开设有滑槽。该无线控制水域无人巡逻船,能够对高清摄像头的高度、方向和角度进行调节,减少拍摄死角,便于高清摄像头拍摄距离较近的场景。技术研发人员:方翊,谭志彩受保护的技术使用者:武汉灵楚智造科技有限公司技术研发日:20231221技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240722/226016.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。