一种船体海洋生物清理机器人的制作方法
- 国知局
- 2024-08-01 07:07:56
本技术涉及机器人,尤其涉及一种船体海洋生物清理机器人。
背景技术:
1、随着全球化的蓬勃发展,运输业、国防建设和海洋资源开采等领域竞争愈加激烈,对船舶工业的技术与需求都提出了挑战。对于船舶业来说,清理船舶表面附着的海生物是船舶维修的重要环节之一。
2、船舶的一部分壁面长期浸入在海水中,不仅会受到海水的冲刷腐蚀,而且随着逐渐使用,船舶壁面会生长出众多的海洋附着生物,海洋生物的长期附着会大大增加船舶的运行阻力,据调查,附着的物质会使船舶的运行速度降低10%左右,同时让船舶的耗油量增加40%左右。若清理时间消耗过长,会严重耽误航期,使得运营成本急剧提高,同时也降低了船舶的使用寿命。
3、目前对船体的清洁方式一般有两种,一种是利用刷子将粘合附着在船底上的海洋生物去除,但该方法很难完全的将船底表面的海生物完全清除,粘附船底的海生物大部分为藤壶和贝类,它们与船体表面是靠它们分泌的粘性物质来吸附的,用刷子去清理时,其受力点是在海生物的表面,是很难达到理想的清洁效果。另一种是利用铲刀来将粘合附着在船底上的海洋生物去除,利用该方法可以达到不错的清洁效果,但是这种清洁装置转动笨拙,且机动性不好,很难达到日常使用的要求。
技术实现思路
1、针对现有技术中存在的不足,本实用新型的目的在于提供一种结构简单、使用方便、机动性好的船体海洋生物清理机器人,可以解决人工对海洋生物进行清理时,难度大、耗时长,清理成果不理想的问题;可以代替人工操作,提高海洋船舶海生物污损清洗效率。
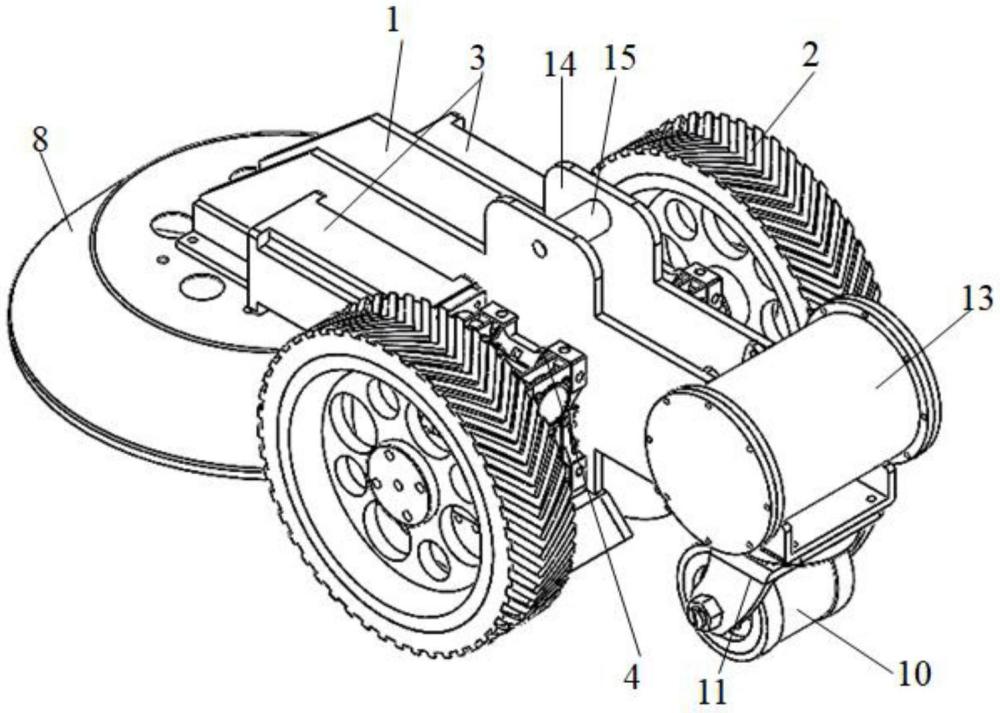
2、为实现上述目的,本实用新型的技术方案为:一种船体海洋生物清理机器人,包括机身,所述机器人还包括行走机构、喷水清理机构和磁吸附机构,所述行走机构安装在机身的两侧驱动机器人行走,磁吸附机构安装在机身的底部,喷水清理机构安装在机身前端,喷水清理机构通过高压水管与甲板上的高压水泵连接。
3、进一步的,所述行走机构包括行走轮、驱动电机和减速机,驱动电机和减速机的外壳均固定连接在机身上,驱动电机的输出轴与减速机的输入轴连接,行走轮安装在减速机的输出轴上,驱动电机工作带动减速机转动进而驱动行走轮转动。
4、进一步的,所述驱动电机为潜水电机,机身为铝合金安装支架,行走轮为橡胶轮。
5、进一步的,所述喷水清理机构包括主管、喷管和喷嘴,主管通过高压水管与甲板上的高压水泵连接,喷管设置在主管的两侧且与主管连通,喷嘴安装在喷管上远离主管的一端。
6、进一步的,所述喷水清理机构还包括喷水盘,喷水盘安装在机身的前端,主管旋转安装在喷水盘的中心位置,喷管和喷嘴位于喷水盘的遮罩内。
7、进一步的,所述喷嘴倾斜安装在喷管上,喷嘴向顺时针方向倾斜。
8、进一步的,所述磁吸附机构包括主磁块和磁力从动轮,主磁块安装在机身的底部且位于两行走轮的内侧,磁力从动轮通过u型支架安装在机身的后端底部位置,u型支架固定安装在机身的底部,磁力从动轮的两端通过转轴转动连接在u型支架上。
9、进一步的,所述主磁块为圆弧状结构,磁力从动轮为圆柱状滚轮,磁力从动轮的两侧设有橡胶轮。
10、进一步的,所述海洋生物清理机器人还包括耐压仓,耐压仓固定安装在机身上,海洋生物清理机器人的控制部件设置在耐压仓内。
11、进一步的,所述机身上设有一对支耳,两支耳之间设有挂轴,挂轴的两端分别固定连接在两支耳上。安全索绳的一端连接在挂轴上。
12、采用本实用新型技术方案的优点为:
13、1、本实用新型的船体海洋生物清理机器人可以解决人工对海洋生物进行清理时,难度大、耗时长,清理成果不理想的问题;可以代替人工操作,提高海洋船舶海生物污损清洗效率。
14、2、本实用新型的船体海洋生物清理机器人搭载清洗机构、磁吸附机构、行走机构于一体,通过高压水射流技术,在不对船体进行损坏的情况下,打击船体表面,可进行船体防腐除锈、清洁、清除船体海生物附着摆脱船舶行使累赘。清洗机构中喷嘴的旋转运动扩大了清扫范围,灵活性更高,机器人操作过程中,不需要搭设脚手架,有效避免人工高空作业的带来的安全隐患,磁吸附式海生物清理机器人操作灵活可以任意行走,并有一定的曲面通过能力,大型船舷、船首也可应对。
技术特征:1.一种船体海洋生物清理机器人,包括机身(1),其特征在于:所述机器人还包括行走机构、喷水清理机构和磁吸附机构,所述行走机构安装在机身(1)的两侧驱动机器人行走,磁吸附机构安装在机身(1)的底部,喷水清理机构安装在机身(1)前端,喷水清理机构通过高压水管与甲板上的高压水泵连接。
2.如权利要求1所述的一种船体海洋生物清理机器人,其特征在于:所述行走机构包括行走轮(2)、驱动电机(3)和减速机(4),驱动电机(3)和减速机(4)的外壳均固定连接在机身(1)上,驱动电机(3)的输出轴与减速机(4)的输入轴连接,行走轮(2)安装在减速机(4)的输出轴上,驱动电机(3)工作带动减速机(4)转动进而驱动行走轮(2)转动。
3.如权利要求2所述的一种船体海洋生物清理机器人,其特征在于:所述驱动电机(3)为潜水电机,机身(1)为铝合金安装支架,行走轮(2)为橡胶轮。
4.如权利要求2或3所述的一种船体海洋生物清理机器人,其特征在于:所述喷水清理机构包括主管(5)、喷管(6)和喷嘴(7),主管(5)通过高压水管与甲板上的高压水泵连接,喷管(6)设置在主管(5)的两侧且与主管(5)连通,喷嘴(7)安装在喷管(6)上远离主管(5)的一端。
5.如权利要求4所述的一种船体海洋生物清理机器人,其特征在于:所述喷水清理机构还包括喷水盘(8),喷水盘(8)安装在机身(1)的前端,主管(5)旋转安装在喷水盘(8)的中心位置,喷管(6)和喷嘴(7)位于喷水盘(8)的遮罩内。
6.如权利要求5所述的一种船体海洋生物清理机器人,其特征在于:所述喷嘴(7)倾斜安装在喷管(6)上,喷嘴(7)向顺时针方向倾斜。
7.如权利要求4所述的一种船体海洋生物清理机器人,其特征在于:所述磁吸附机构包括主磁块(9)和磁力从动轮(10),主磁块(9)安装在机身(1)的底部且位于两行走轮的内侧,磁力从动轮(10)通过u型支架(11)安装在机身(1)的后端底部位置,u型支架(11)固定安装在机身(1)的底部,磁力从动轮(10)的两端通过转轴转动连接在u型支架(11)上。
8.如权利要求7所述的一种船体海洋生物清理机器人,其特征在于:所述主磁块(9)为圆弧状结构,磁力从动轮(10)为圆柱状滚轮,磁力从动轮(10)的两侧设有橡胶轮(12)。
9.如权利要求1所述的一种船体海洋生物清理机器人,其特征在于:所述海洋生物清理机器人还包括耐压仓(13),耐压仓(13)固定安装在机身(1)上,海洋生物清理机器人的控制部件设置在耐压仓(13)内。
10.如权利要求1所述的一种船体海洋生物清理机器人,其特征在于:所述机身(1)上设有一对支耳(14),两支耳(14)之间设有挂轴(15),挂轴(15)的两端分别固定连接在两支耳上,安全索绳的一端连接在挂轴(15)上。
技术总结本技术涉及机器人技术领域,具体涉及一种船体海洋生物清理机器人,包括机身、行走机构、喷水清理机构和磁吸附机构,所述行走机构安装在在机身的两侧驱动机器人行走,磁吸附机构安装在机身的底部,喷水清理机构安装在机身前端,喷水清理机构通过高压水管与甲板上的高压水泵连接。本技术的船体海洋生物清理机器人可以解决人工对海洋生物进行清理时,难度大、耗时长,清理成果不理想的问题;可以代替人工操作,提高海洋船舶海生物污损清洗效率。技术研发人员:王佃英,刘文川,许卫华受保护的技术使用者:东营鑫博瑞智能科技有限公司技术研发日:20231228技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/226296.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表