一种无缆水下机器人投放两侧稳固装置
- 国知局
- 2024-08-01 07:08:01
本发明涉及舰载机器人运输与投放领域,特别涉及一种无缆水下机器人投放两侧稳固装置。
背景技术:
1、随着海洋勘探需求的不断提高,无缆水下机器人的使用也日益广泛,一些无缆水下机器人可以完成对海底地形勘测,或是海洋生物种群数量调查,以及海洋污染情况等参数的测定,而运输无缆水下机器人的船只,并不是都配备有可供发射的发射井或是可供存储的仓库。未配备有发射井的舰船,现有的投放措施是通过甲板起重机从甲板上吊起并放入水中。因此,在此基础上,无缆水下机器人的投放与运输均可以通过一种无缆水下机器人投放两侧稳固装置完成。无缆水下机器人被固定在该装置上后,并可以直接投放,无需起重机的参与。
2、本发明减少了原本无缆水下机器人投放与运输过程中所占用的甲板或船舱空间,无缆水下机器人投放两侧稳固装置同时也可以加快投放速度,缩短一次海洋勘探的周期。此外,无缆水下机器人投放两侧稳固装置也可以配合另外的无缆水下机器人储存机构,解决多批量的机器人投放问题。
技术实现思路
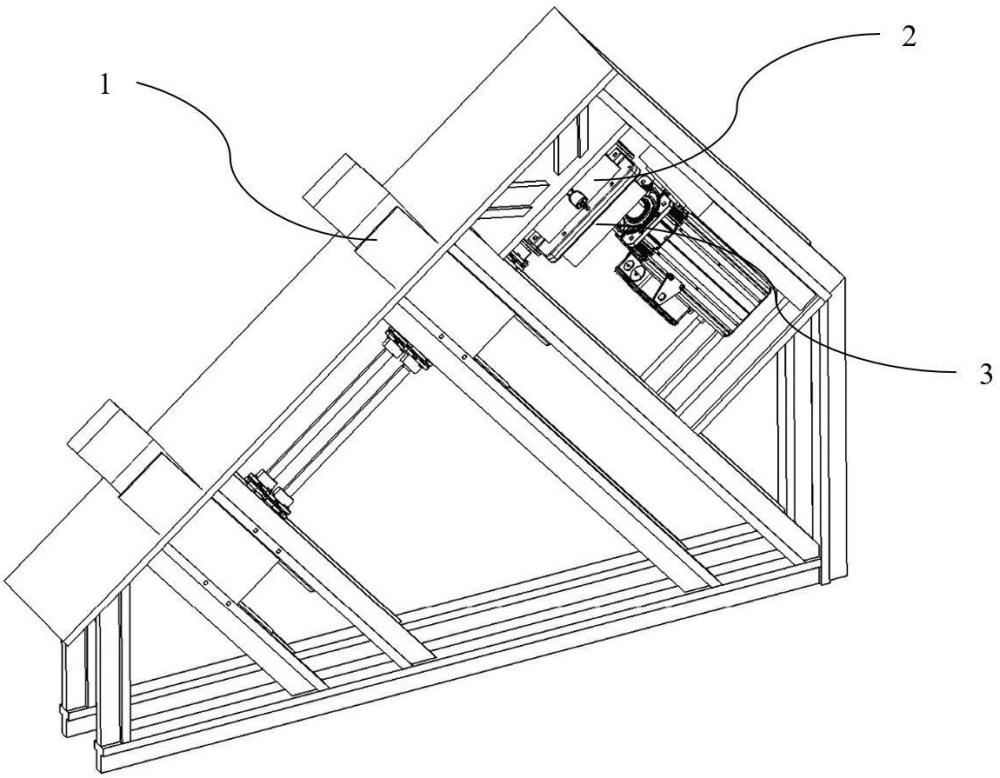
1、本发明为了弥补现有技术的缺陷,提供了一种无缆水下机器人投放两侧稳固装置。本发明所采用的技术方案是:一种无缆水下机器人投放两侧稳固装置,其特征在于主要由auv止动架、auv止动伺服电机、止动箱体、蜗轮蜗杆、长轴与短轴、直齿齿轮、斜齿轮、联轴器,auv止动板组成。
2、优选的,所述的一种无缆水下机器人投放两侧稳固装置,其特征在于auv止动伺服电机与蜗杆之间由膜片联轴器相连接;蜗杆上端固定有圆锥滚子轴承,下端固定有圆锥滚子轴承和止动箱体下透盖。
3、优选的,所述的止动箱体,其特征在于止动箱体内部主要由蜗轮与蜗杆、前端短轴1和后端短轴1、透盖、圆锥滚子轴承,斜齿轮组成。
4、优选的,所述的止动箱体,其特征在于止动箱体外侧由止动箱体上端和止动箱体下端组成;止动箱体上端具有卸油螺母;止动箱体下端具有加油孔盖,加油孔盖杆。
5、优选的,所述的前端短轴1,其特征在于前端短轴1右端固定有止动箱体右闷盖、圆锥滚子轴承;前端短轴1上固定有蜗轮,蜗轮与蜗杆接触;前端短轴1上固定有斜齿轮。
6、优选的,所述的后端短轴1,其特征在于后端短轴1右端固定有止动箱体右端盖、圆锥滚子轴承;后端短轴1上固定有斜齿轮,与前端短轴1上的斜齿轮接触配合。
7、优选的,所述的长轴和短轴,其特征在于长短轴之间均通过膜片联轴器连接。
8、优选的,所述的长轴和短轴,其特征在于前端短轴2和前端短轴3与后端短轴2和后端短轴3上固定有直齿齿轮,两个直齿齿轮内侧接触,直齿齿轮外侧分别于与一对齿条接触,齿条上固定有auv止动板。
9、优选的,所述的前端短轴3和后端短轴3,其特征在于两个轴左侧均固定有轴承透盖,两个轴固定于在止动轴承座上,止动轴承座固定于auv止动架上。
10、与现有技术相比,本发明的有益效果是:优化了无缆水下机器人投放的过程,把运输与投放结合,减少了原先起重机运输的时间。若与存储架和传送机构配合,可以实现更好的无缆水下机器人传动与投放过程。
技术特征:1.一种无缆水下机器人投放两侧稳固装置,其特征在于主要由auv止动架(4)、auv止动伺服电机(11)、止动箱体(2、3)、蜗轮(22)、蜗杆(21)、长轴(7、8)与短轴(5、6、9、10、15、16)、直齿齿轮(14)、斜齿轮(18)、膜片联轴器(26),auv止动板(1)组成。
2.根据权利要求1中所述的一种无缆水下机器人投放两侧稳固装置,其特征在于auv止动伺服电机(11)与蜗杆(21)之间由膜片联轴器(26)相连接;蜗杆(21)上端固定有圆锥滚子轴承(24),下端固定有圆锥滚子轴承(24)和止动箱体下透盖(25)。
3.根据权利要求1中所述的止动箱体(2、3),其特征在于止动箱体内部主要由蜗轮(22)与蜗杆(21)、前端短轴1(16)和后端短轴1(15)、止动箱体下透盖(25)、圆锥滚子轴承(24),斜齿轮(18)组成。
4.根据权利要求1中所述的止动箱体(2、3),其特征在于止动箱体外侧由止动箱体上端(2)和止动箱体下端(3)组成;止动箱体上端(3)具有卸油螺母(17);止动箱体下端具有加油孔盖和加油孔盖杆(20)。
5.根据权利要求3中所述的前端短轴1(16),其特征在于前端短轴1右端固定有止动箱体右闷盖(19)、圆锥滚子轴承(24);前端短轴1(16)上固定有蜗轮(22),蜗轮(22)与蜗杆(21)接触;前端短轴1(16)上固定有斜齿轮(18)。
6.根据权利要求3中所述的后端短轴1(15),其特征在于后端短轴1右端固定有止动箱体右端盖(23)、圆锥滚子轴承(24);后端短轴1(15)上固定有斜齿轮(18),与前端短轴1(16)上的斜齿轮(18)接触配合。
7.根据权利要求1所述的长轴和短轴,其特征在于长短轴之间均通过膜片联轴器连接。
8.根据权利要求1所述的长轴(7、8)和短轴(5、6、9、10、15、16),其特征在于前端短轴2(10)和前端短轴3(10)与后端短轴2(10)和后端短轴3(10)上固定有直齿齿轮(14),两个直齿齿轮内侧接触,直齿齿轮外侧分别于与一对齿条(13)接触,齿条(13)上固定有auv止动板(1)。
9.根据权利要求8中所述的前端短轴3(6)和后端短轴(5),其特征在于两个轴左侧均固定有轴承透盖,两个轴固定于在止动轴承座(12)上,止动轴承座固定于auv止动架(4)上。
技术总结本发明涉及舰载机器人运输与投放领域内的一种无缆水下机器人投放两侧稳固装置,主要由AUV止动架、AUV止动伺服电机、止动箱体、蜗轮蜗杆、长轴承与短轴承、直齿齿轮、斜齿轮、联轴器,AUV止动板组成。其中,AUV止动架上固定有AUV止动伺服电机,AUV止动伺服电机与止动箱体中的蜗杆之间通过联轴器相连,蜗杆与固定在前端短轴承1上的涡轮接触,前端短轴承1上固定有斜齿轮,斜齿轮与后端短轴承1上的斜齿轮接触,前端短轴承1和后端短轴承1均固定在AUV止动架上。各本发明优化了未配备有发射井或其他发射器的船只在运输与投放时需要起重机与人工配合的过程,节省了运输时占用的额外空间,并缩短了先前投放时的运输时间。技术研发人员:辛运胜,闫新宇,李鹏,任亚峰,吕树毅受保护的技术使用者:太原科技大学技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/226308.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表