一种针对于带吊耳式水下坐底目标物钩锁连接与打捞装置
- 国知局
- 2024-08-01 07:12:15
本发明是一种针对于带吊耳式水下坐底目标物钩锁连接与打捞装置,属于水下作业机器人装置领域。
背景技术:
1、水下现有的水下观测、打捞、救援等均是由专业潜水员完成,在实际操作中大都水况不明、环境复杂、压力、时间、温差等对潜水员的水下作业往往带来未知的生命安全威胁,随着工业技术的发展,水下机器人应运而生。
2、在现有的专利中,例如申请号为202011366014.7,名称为“一种重型物水下打捞装置”的专利文件,与申请号为202211439850.2,名称为“一种水下深埋物打捞系统”的专利文件,这两个发明专利由于都采用的是机械手爪抓取的方式,这种打捞方式好处就是方便快捷,只需要观测出待打捞物的具体位置然后进行打捞即可,但是这种直接利用机械手爪打捞的方式由于其夹紧力不好控制容易对待打捞物造成破坏,极易造成环境污染所以这类方式不被提倡,而且其对待打捞物位置的捕捉也极其困难,由于暗礁丛生的海底环境十分复杂以及各种环境因素的干扰使得一些重型坐沉打捞机构难以实现坐沉下落,因此使得打捞异常困难。
3、以上专利的机械手爪式的打捞并不适合对于海底目标物的打捞,且上述方式极易对目标物造成二次破坏,因此上述专利在应用对象与功能要求上与本发明不同。本专利的重点是想通过水下机器人实现将钩锁与目标物吊耳进行连接,连接成功后将钩锁从装置的主体上脱开,然而钩锁上通过绳索连接有一个内置气囊的浮球,当钩锁与机构主体脱开后气囊内化学物质反应充气涨大,当目标物重量较小时可以直接借助两个内置气囊的浮球把未爆弹打捞出水面,当目标物重量较大时可以通过后续抓取具有一定体积的浮球从而实现降低打捞的难度实现精准打捞。该装置可实现对含吊耳水下坐底目标物的安全打捞。
技术实现思路
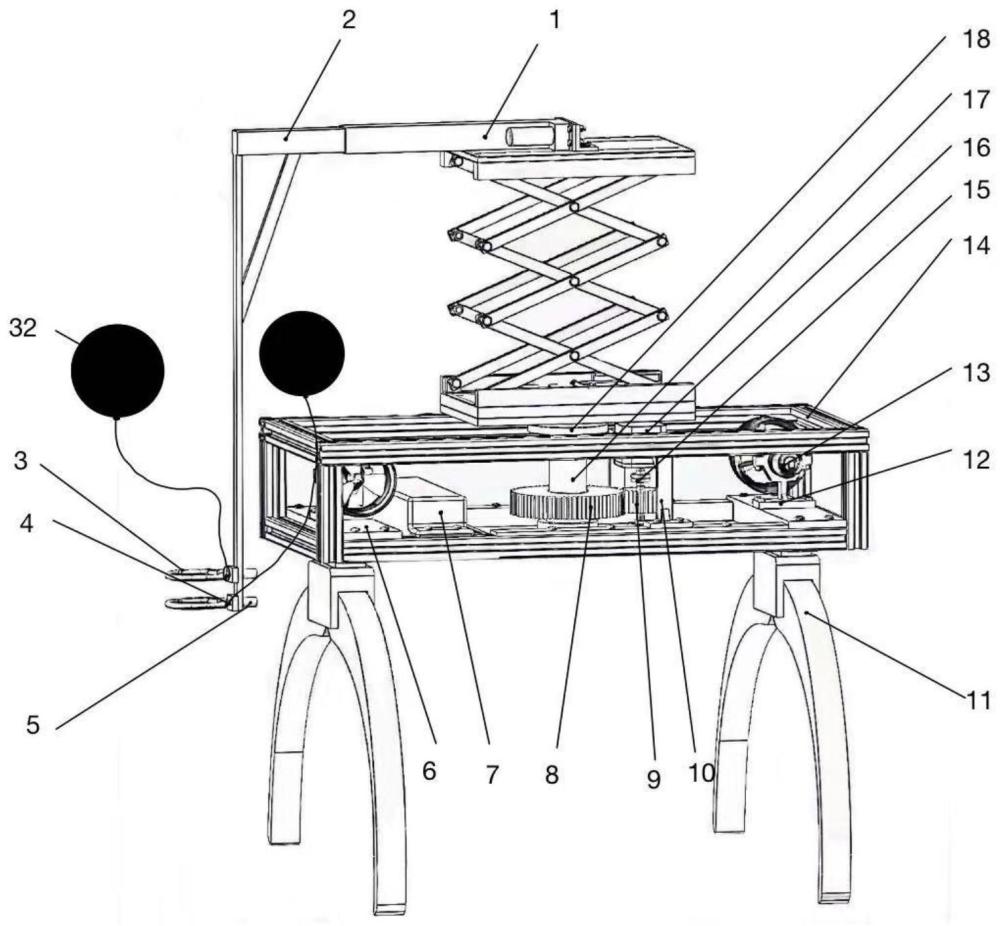
1、针对上述问题,本发明提出一种能在海水中对吊耳位置随机复杂的目标物进行钩锁连接和打捞装置。技术方案:种能在海水中对吊耳位置随机复杂的目标物进行钩锁连接和打捞装置,包括:夹爪、推进器、齿轮式转台装置、电动剪叉式升降装置、电动推杆伸缩装置、电磁挂钩脱开装置,
2、所述钢材框架内对称设置有多个夹爪底座,夹爪底座的上端面均设置有推进器,夹爪底座的下端面均设置有夹爪,多个所述夹爪底座之间设置有电子仓和齿轮式转台装置,所述齿轮式转台装置的输出端连接有电动剪叉式升降装置,电动剪叉式升降装置的升降端设置有电动推杆伸缩装置,电动推杆伸缩装置的伸缩端部连接有电磁挂钩脱开装置。
3、作为优选方案,齿轮式转台装置包括:电机、小齿轮、大齿轮和转台;
4、所述电机设置在电机支撑架上,电机的输出端通过联轴器连接有小齿轮轴,小齿轮轴上设置有小齿轮,所述小齿轮与大齿轮啮合,大齿轮通过其上设置的大齿轮轴连接转台,转台与电动剪叉式升降装置的底部。
5、作为优选方案,电动剪叉式升降装置包括:主要由底盘、内杆件、外杆件、销轴、升降电机、丝杠、丝杠螺母、轴承座、拉杆、滑块、螺柱、平台组成,
6、所述底盘的下端面与转台连接,底盘的上端面设置有升降电机,丝杠通过轴承座设置在底盘上,升降电机的输出端通过升降平台联轴器与丝杠连接,所述丝杠外套设有丝杠螺母,丝杠螺母两侧均连接有拉杆,拉杆与内杆件连接,所述多个内杆件组合为剪刀架结构,剪刀架结构上设置有平台
7、作为优选方案,电磁挂钩脱开装置包括:挂钩、电磁吸附主体和舵机小角度旋转装置,所述伸缩臂的前端设置有多个舵机小角度旋转装置,多个所述舵机小角度旋转装置上均设置有电磁吸附主体,电磁吸附主体上设置有挂钩
8、一种auv机器人用水下坐底目标物钩锁连接与打捞装置,包括:auv机器人,针对于带吊耳式水下坐底目标物钩锁连接与打捞装置通过夹爪与auv机器人的外壳连接。
9、有益效果:
10、1、由于海底目标物姿态具有随机性以及海底暗礁丛生环境十分的复杂,所以很多重型落底打捞机构很难稳定的降落于海底。然而该发明避开了着落于海底的这个复杂操作选择于目标物上降落的方式避免了以上的问题。
11、2、通过设计挂钩与吊耳连接来进行打捞,采用这种通过勾吊耳来进行打捞的方法与现有的通过机械手直接抓取相比避免了由于机械手爪力量不好控制的问题,从而有效避免了对目标物的二次破坏,大大的加强了对目标物打捞的安全性和可靠性。
12、3、将电机通过两个电机支撑架来悬空放置,然后通过两个齿轮进行对转台的旋转动作从而进行动力传递,不仅机构简单而且装置结构紧凑,节省占用空间。
13、4、电动剪叉式升降装置,这种装置可以通过电机实现对平台上升位置进行稳定的控制,由于海底具有一定的海流会加剧机构的不稳定性,采用剪叉式的该机构提高了工作安全性与降低操作难度。
14、5、电磁挂钩脱开装置,该装置原理简单操作方便,脱开只需要机构转动或移动的拉力即可实现,十分的方便,而且该机构可以实现较小的体积和重量,使装置更加简洁。
技术特征:1.一种针对于带吊耳式水下坐底目标物钩锁连接与打捞装置,其特征在于,包括:夹爪(11)、推进器(13)、齿轮式转台装置(41)、电动剪叉式升降装置(42)、电动推杆伸缩装置(43)、电磁挂钩脱开装置(44),
2.根据权利要求1所述的一种针对于带吊耳式水下坐底目标物钩锁连接与打捞装置,其特征在于,所述齿轮式转台装置(41)包括:电机(16)、小齿轮(9)、大齿轮(8)和转台(18);
3.根据权利要求1所述的一种针对于带吊耳式水下坐底目标物钩锁连接与打捞装置,其特征在于,所述电动剪叉式升降装置包括:主要由底盘(25)、内杆件(30)、外杆件(19)、销轴(20)、升降电机(24)、丝杠(28)、丝杠螺母(29)、轴承座(27)、拉杆(23)、滑块(22)、螺柱(21)、平台(31)组成,
4.根据权利要求1所述的一种针对于带吊耳式水下坐底目标物钩锁连接与打捞装置,其特征在于,所述电磁挂钩脱开装置(44)包括:挂钩(3)、电磁吸附主体(4)和舵机小角度旋转装置(5),所述伸缩臂(2)的前端设置有多个舵机小角度旋转装置(5),多个所述舵机小角度旋转装置(5)上均设置有电磁吸附主体(4),电磁吸附主体(4)上设置有挂钩(3)。
5.根据权利要求1-4任一所述的一种auv机器人用水下坐底目标物钩锁连接与打捞装置,其特征在于,包括:auv机器人(101),针对于带吊耳式水下坐底目标物钩锁连接与打捞装置通过夹爪(11)与auv机器人(101)的外壳连接。
技术总结本发明涉及一种针对于带吊耳式水下坐底目标物钩锁连接与打捞装置,属于于水下作业机器人装置领域技术领域,材框架内对称设置有多个夹爪底座,夹爪底座的上端面均设置有推进器,夹爪底座的下端面均设置有夹爪,多个所述夹爪底座之间设置有电子仓和齿轮式转台装置,所述齿轮式转台装置的输出端连接有电动剪叉式升降装置,电动剪叉式升降装置的升降端设置有电动推杆伸缩装置,电动推杆伸缩装置的伸缩端部连接有电磁挂钩脱开装置,由于海底目标物姿态具有随机性以及海底暗礁丛生环境十分的复杂,所以很多重型落底打捞机构很难稳定的降落于海底。然而该发明避开了着落于海底的这个复杂操作选择于目标物上降落的方式避免了以上的问题。技术研发人员:刘星,王童,张铭钧,赵周晨,陆启兴,耿博,李佶桃,姚峰受保护的技术使用者:哈尔滨工程大学技术研发日:技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240722/226542.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表