一种基于平衡货轮集装箱重心的系统
- 国知局
- 2024-08-01 07:16:34
本发明属于安全系统领域,涉及了一种基于平衡货轮集装箱重心的系统、其工作方法,用来保证货轮航行安全;具体的是,涉及了一种适用于货轮航行时平衡集装箱和货轮重心的监测调整设备。
背景技术:
1、货轮航行期间,由于船上货物众多容易导致重心不平衡,没有满足轮船航行重心偏移指标,并且重心不平衡容易导致航行事故频发,且货轮在海面航行时会遇到各式各样的突发情况,如海浪、天气、货轮操作不当等众多自然或者人为因素,在面对如此多的突发情况下,如果货轮不能进行一个准确的快速的自主平衡,则很容易导致航行事故的发生。
2、现有的平衡货轮重心的方法是提前在仿真软件上面拟定好集装箱的排列模型,然后按照仿真模型结果来进行装货,对一个货物的重心并没有进行详细的实时监测,而且在航行时面对特殊情况也不能知道重心的具体偏移情况,只能通过船长对于船体偏移的感知以及操控船舵来保持货轮的中心平衡,并不能在面对特殊情况的时候进行一个灵活的、快速的、精准的调整来平衡货轮的重心来保证航行安全,并且很多货轮采用的还是手动摇舵来进行平衡货轮重心,具有很强的不精确性,没有办法在第一时间就进行很灵活精准的平衡,使航行依旧存在危险因素。
3、鉴于此,如何在装货时就监测货物重心,如何在航行时面对特殊情况能实时反映重心的偏移量、偏移方向且自主进行一个灵活调整,保证航行安全是亟待解决的问题。
技术实现思路
1、针对上述问题,本发明目的是提出了一种基于平衡货轮集装箱重心的系统、其工作方法,能够及时的监测货物重心的偏移,平台进行数据计算给出最优堆叠方式,在航行时面对特殊性情况,平台监测并进行一个灵活调整。
2、本发明的技术方案是:本发明所述的一种基于平衡货轮集装箱重心的系统,包括货物排列平台、重心监测平台及灵活调整平台;
3、所述货物排列平台连接重心监测平台,所述重心监测平台连接灵活调整平台;
4、所述货物排列平台所需采集的数据包括货物的重量、高度及数量,基于野狗算法的货物排列模型;
5、所述重心监测平台包括重心预测模型;
6、所述灵活调整平台包括接受重心监测平台的数据,比对重心偏移指标,利用货轮内安装的蓄水池对海水进行抽取和释放,以此来改变、控制货轮的重心。
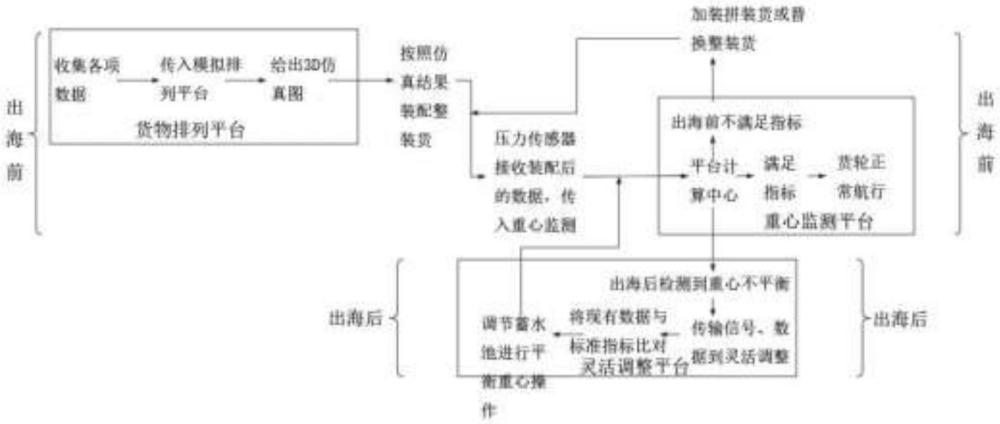
7、进一步的,所述货物排列平台收集需要装上货轮的整装集装箱的重量数据、高度数据、数量数据以及拼装集装箱的重量数据、高度数据、数量数据和价值数据,将收集到的数据传入模拟排列平台,平台通过算法将集装箱进行合理的排列,再按照整装货优先装配,拼装货用于平衡重心的原则进行排列装配,平台在接收到数据之后给出排列的3d图型,如果整装货装配完之后,重心不满足指标,则可在平台之内加入部分拼装货数据进行重新排列,直到重心满足指标要求。
8、进一步的,所述基于野狗算法的货物排列平台,即迫害攻击、分组策略和清扫行为;
9、具体的是:(1.1)、种群初始化:
10、野狗种群在搜索边界内随机初始化:
11、
12、式中,lbi和ubi分别表示个体的重心偏移指标的最小值以及最大值,randi是[0,1]之间的随机数;
13、由于种群初始化具有随机性,故采用tent混沌映射优化初始化种群使得初始解分布在解空间内;其中,基于tent映射生成混沌序列如下:
14、
15、(1.2)、群体攻击:
16、捕食者使用高度智能的狩猎技术;此步骤捕食的大猎物为出海前货轮的不平衡情况,其行为如式(2)所示:
17、
18、式中,t代表当前的迭代次数,是野狗新位置;na是在[2,sizepop/2]的逆序中生成的随机整数,其中sizepop是野狗种群的规模;φk(t)是将攻击的野狗的子集,其中φ∈x,是随机生成的野狗种群;x i(t)是当前野狗的位置;gm是上一次迭代中发现的最佳野狗;β1是在[-2,2]内均匀生成的随机数,是一个比例因子,可改变野狗轨迹的大小;
19、(1.3)、迫害攻击:
20、此步骤中的猎物是指出海后航行时遇到特殊情况造成的重心不平衡,超过规定指标;式(3)模拟了这种行为:
21、
22、式中,是野狗新位置,gm是上一次迭代中发现的最佳野狗,β1的值与式(2)中的值相同,β2是在[-1,1]区间内均匀生成的随机数,r 1是在从1到最大搜索代理大小的区间内生成的随机数,x r 1→(t)是随机选择的第r 1个野狗,其中i≠r 1;
23、(1.4)、迫害攻击:
24、此步骤中的清扫是指复查货轮还有无不平衡的情况;
25、式(4)用于模拟这种行为:
26、
27、式中,是野狗新位置,β2的值与式(2)中的值相同,r1是在从1到最大搜索代理大小的区间内生成的随机数,xr1(t)是随机选择的第r 1个野狗,其中i≠r 1;σ是算法随机生成的二进制数,σ∈{0,1}。
28、进一步的,所述重心监测平台分为出海前监测和出海后监测;出海前将整装集装箱装配到货轮上后通过压力传感器收集数据,将收集的数据传入重心计算平台,通过平台内计算公式对货轮现重心进行计算,如若满足指标,则货轮出航,如若不满足指标,则采取加装拼装集装箱或者用拼装集装箱替代一部分整装集装箱的方式来平衡重心,再完成新的装配之后,重心计算平台重新计算重心,满足指标则货轮出航,如若不满足指标则按照上述方式重新进行调整,直至货轮中心满足指标再出航;出海后,遇到风浪导致重心不稳,重心监测平台监测到重心不满足指标,则传输信号给灵活调整平台,灵活调整平台调整之后,平台重新计算是否满足指标,如不满足则持续调整。
29、进一步的,所述重心监测平台的重心的计算检测公式如下:
30、(1)、船舶重心高度的计算:
31、在上述各项的基础上,重心高度的计算用下述二公式进行:
32、△=∑pi
33、
34、式中,δ是船舶排量(t);kg为船重高度(m);pi为第i项重量(t);zi为pi的重心高度(m);
35、(2)、gm的计算:
36、所述船舶的初稳性高度gm是其初横稳心距基线高度与船舶重心高度的差值,其计算公式为:
37、gm=km-kg
38、式中,km是初横稳心距基线的距离;利用船舶排水量为引数在静水力参数表中查取;gm是指出海前货轮最佳装载位置的初稳性高度;
39、(3)、重量垂向移动对稳性的影响:
40、船内重的垂向移动只改变船舶的重心高度而不改变稳心距其线高度;
41、设将重量p由z1移至z2,则船舶的重心改变量δkg为:
42、δkg=p(z2-z1)
43、稳性的改变量dgm与重心的改变量大小相等,符号相反,即:
44、δgm=p(z1-z2)
45、(4)、自由液面对稳性的影响:
46、船内液舱中的自由液面对船舶稳性有减小作用,其数值为:
47、δgmf=∑ρix/δ
48、式中,ρ表示舱内液体的密度,ix表示液舱内自由液面对液面中心轴的面积横矩;
49、(5)、经自由液面修正后的初稳心高度:
50、g0m=km-kg-δgmf
51、(6)、船舶横摇周期:
52、tθ=0.58f√(b+4kg)/gom
53、式中,0.58为常数,f可由b/d查出,b表示船舶型宽,d表示船舶装载吃水;
54、(7)、装卸对稳性的影响:
55、装卸系指装卸货物、打排压载水、油水的消耗及物料的消耗,即改变稳心距基线高度,又改变重心高度。
56、进一步的,所述装卸对稳性的影响的具体过程是:
57、(7.1)、大量装卸:装卸量超过当时排水量的10%时,船舶稳性的改变量用下式计算:
58、
59、式中,km0和km1分别是装卸前和装卸后的稳心距基线高度,kg0是装卸前的船舶重心高度,p是装卸重量,其装货时为正,卸货时为负;zp是p装在船上时的重心距基线高度;
60、(7.2)、小量装卸:
61、
62、装卸量不超过当时排水量的10%时,船舶稳性的改变量用下式计算:
63、式中,d是装卸前的船舶吃水,e是装卸过程中的平行沉浮量的一半,装货为正,卸货为负;
64、(7.3)、极小量装卸:
65、排水量在半载以上时装卸量不超过当时排水量的1%,或排水量在半载以下时装卸量不超过当时排水量的1‰的情况下,船舶稳性的改变量可用下式计算:
66、
67、上述公式用于装卸单件货物时对稳性高度的影响。
68、进一步的,所述灵活调整平台具体是通过在货轮船体之内和船体两侧加装一个蓄水池,蓄水池通过蓄放水抽取和释放海水来改变货轮整体的吃水深度,且通过改变吃水深度来改变整体的重心,蓄水池抽取的海水质量根据实时重心数据来决定,当实时数据满足重心要求则停止抽取,若不满足则继续抽取,反之,释放海水亦如此;
69、船体两侧的蓄水池用来调整船在航行时由于海浪拍打撞击的原因导致船体左右摇晃而导致的重心不稳问题;
70、该平台内部记录重心偏移的标准指标,平台的运作是在接收到重心监测平台发出重心不稳的信号之后,通过比对现船体重心指标和标准重心指标偏移的地方,再针对性的调动蓄水池进行蓄放水来改变船体的吃水深度,蓄水池抽取的海水越多则改侧吃水越多,通过不断抽取释放海水改变船体两侧的吃水深度保证航行的稳定,以此确保货轮的航行安全。
71、进一步的,在所述灵活调整平台中,在重力检测平台监测到重心偏移量超出指标时,灵活调节平台开始运作,由蓄水池进行蓄放水操作,以此来使得货轮整体重心满足重心偏移指标,所需计算公式如下所示:
72、(8.1)、自由液面对稳性的影响:
73、船内液舱中的自由液面对船舶稳性有减小作用,其数值为:
74、δgmf=∑ρix/δ
75、式中,ρ表示舱内液体的密度,ix表示液舱内自由液面对液面中心轴的面积横矩;
76、(8.2)、经自由液面修正后的初稳心高度:
77、g0m=km-kg-δgmf。
78、进一步的,所述比对重心偏移指标具体是,其中的重心偏移数据通过控制货轮装卸货物、货轮的吃水深度及货轮内的自由液面来获得,而货轮出海前的重心gm1偏移指标需满足以下关系式,结合上述计算公式所得:
79、gm1=km-kg±δgm
80、出海后的重心gm2偏移指标需满足以下关系式:
81、gm2=km-kg±δgm-δgmf≤gm1
82、式中,gm表示船舶的初稳性高度,km表示初横稳心距基线的距离,kg表示船舶的重心高度,δgm表示装卸货物稳性该变量,δgmf表示船舱内自由液体对重心稳性的改变量,即蓄水池中抽取释放的海水对重心稳性的改变量。
83、进一步的,一种基于平衡货轮集装箱重心的系统的工作方法,其操作步骤如下:
84、步骤(1):首先,出海前先在货轮上面加装整装货,由甲板下方的压力传感器收集数据并传输到平台计算,获得整装货的排列方式;
85、步骤(2):其次,重心监测平台计算货轮重心是否偏差,若偏差则加装拼装货平衡出海前货轮重心;
86、步骤(3):然后,出海后重心监测平台实时监测货轮重心数据,若航行时重心出现偏差则传输信号到灵活调整平台;
87、步骤(4):最后,灵活调整平台调动蓄水池对航行时的货轮进行实时重心调整,保证航信安全。
88、本发明的有益效果是:1、本发明有助于货轮的航行安全,在面对各种海上突发情况,如海浪拍打、暴风雨等等造成货轮重心摇晃、偏移的情况时能够进行实时的监测,并且在第一时间调动蓄水池来对重心进行灵活及时调整,以此来保证航行的稳定和安全,保证货轮的重心始终满足重心偏移指标。在本发明中利用野狗算法来对出海前和出海后的不平衡情况进行一个追踪和排查,准确即及时的定位不平衡位置,并且调动蓄水池对不平衡情况进行及时的调整,用以保证船体不会大幅晃动,重心不会大幅偏移,保证航行的安全;2、本发明采用的改进野狗算法对初始化种群进行了优化,原算法的种群实在区间之内随机生成,具有很强的随即性和不确定性。现在利用tent混沌映射对初始化种群进行优化,在保留原有种群的功能的同时,大大降低的种群产生的随机性和不确定性,还能在一定程度上保证后续算法的正确稳定运行。
本文地址:https://www.jishuxx.com/zhuanli/20240722/226839.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。