一种基于液动软体致动器的仿蝠鲼胸鳍及其参数优化方法
- 国知局
- 2024-08-01 07:16:31
本发明涉及水下仿生机器人,尤其涉及一种基于液动软体致动器的仿蝠鲼胸鳍及其参数优化方法。
背景技术:
1、刚性机器人受到外部环境的限制性较高,执行过程中不够灵活。为了弥补传统机器人的不足,软体机器人的研究领域得到了越来越迅速的发展,比起刚性机器人,软体机器人更容易变形,并且还具有机械弹性。软体机器人的核心就在于其软体致动器。比较常见的软体致动器有很多形式,其中主要的驱动形式包括形状记忆合金(sma)、流体(气液压)以及电活性聚合物等。
2、蝠鲼是一种利用胸鳍摆动来获得推进力的鱼类,身体扁平,整体呈现菱形,具有优秀的巡游与机动性能,可以实现原地灵活的转向。仿蝠鲼胸鳍结构是基于蝠鲼生物的原型,模仿其运动特性,采用特殊的驱动结构与柔性材料制作出的一种仿生胸鳍。仿蝠鲼胸鳍能够模仿蝠鲼的扑动方式来进行运动,从而产生推进力。
3、专利cn 112339958 a中提出了一种采用sma丝驱动的仿生蝠鲼鱼结构,虽然其控制方式简单、噪音小,但是由于sma丝产生的驱动力较小,很难产生较大的形变,故造成仿生蝠鲼鱼运动迟缓、灵活性较差。论文《abending pneumatic rubber actuator realizingsoft-bodied manta swimming robot(doi:10.1109/robot.2007.364246)》中日本大阪大学曾用绕线式致动器前置驱动硅胶翼膜,开发出世界首款气动软体蝠鲼,该仿生蝠鲼的胸鳍为单根鳍条,其胸鳍为完全柔性,结构简单,易于控制,但其仅能通过前缘致动器摆转/弯曲带动后缘,借由自身柔性在水中被动变形产生推力,无法主动控制胸鳍俯仰姿态,推进效率与生物原型存在较大差距。
技术实现思路
1、发明目的:本发明旨在提供一种基于液动软体致动器的可以主动控制俯仰姿态的仿蝠鲼胸鳍及其参数优化方法。
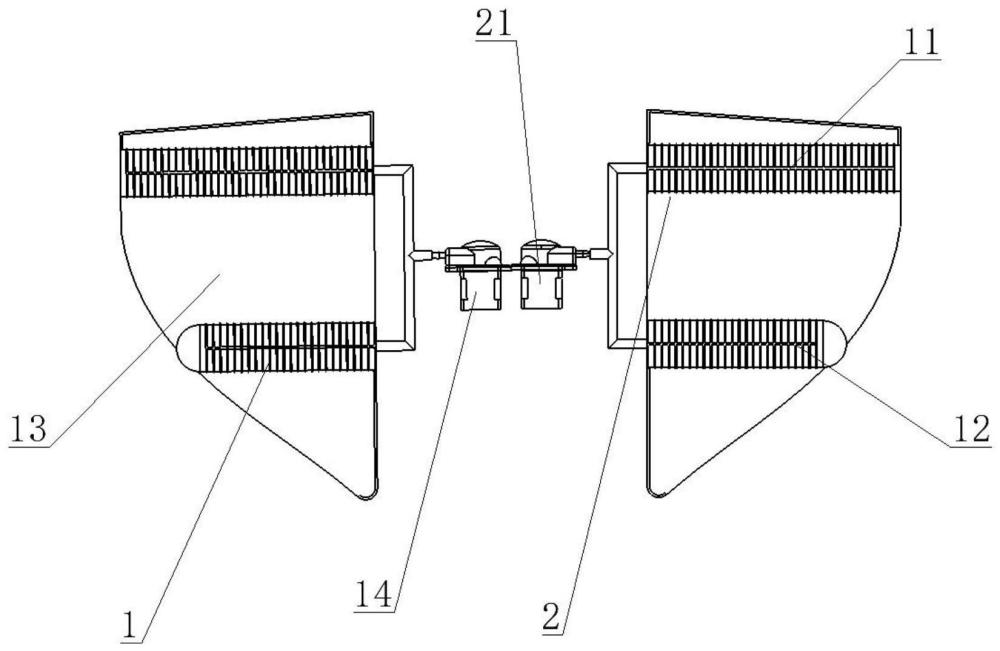
2、技术方案:本发明所述的基于液动软体致动器的仿蝠鲼胸鳍,包括左蠕动泵、右蠕动泵和镜像设置的左胸鳍和右胸鳍,左胸鳍和右胸鳍的弹性基体上均设有主致动器和辅致动器,主致动器和辅致动器通过管道与蠕动泵连接,主致动器和辅致动器均包括弹性腔体和中间限制板,弹性腔体包括圆柱形空腔,空腔由中间层划分为对称的上、下半圆空腔,每个半圆空腔均设有接口与管道连接;中间限制板为矩形硬质材料板,设置在弹性腔体的中间层表面;当上半圆腔室冲入高压流体时,主/辅致动器向下弯曲,当下半圆腔室冲入高压流体时,主/辅致动器向上弯曲。
3、进一步的,当主致动器和辅致动器同方向弯曲时(相位差为360°),主致动器和辅致动器的上半圆腔室通过管道与蠕动泵形成回路一,主致动器和辅致动器的下半圆腔室通过管道与蠕动泵形成回路二,向上扑动时,蠕动泵将上半圆腔室的液体抽到下半圆腔室中,向下扑动时,则相反。
4、进一步的,当主致动器和辅致动器反方向弯曲时(相位差为180°),主致动器和辅致动器的上半圆腔室和下半圆腔室通过管道与蠕动泵分别形成回路三和回路四,当向上扑动时,蠕动泵将主致动器的上半圆腔室的液体抽到主致动器的下半圆腔室,将辅致动器的下半圆腔室的液体抽到辅致动器的上半圆腔室,向下扑动时,则相反;扑动方向由主致动器的弯曲方向决定。
5、优选的,所述主致动器和辅致动器还包括限制线,限制线由多根侧线和两根顶线组成,侧线为圆环状,沿着弹性腔体轴向方向均匀分布,布置在腔体表面,顶线依次连接每根侧线且布置在弹性腔体的上下表面。限制线的侧线作用在于限制长腔体的径向膨胀,顶线作用在于提高整体鳍面的刚度。
6、优选的,所述限制线由硬质硅胶材料制得。
7、优选的,所述弹性腔体由硅胶制得。
8、进一步的,所述弹性基体包括第一骨架、第二骨架和柔性鳍面,第一骨架和第二骨架由硬质硅胶制得,第一骨架为无斜边的梯形,其下长边与主致动器的弹性腔体靠近蠕动泵一侧端面连接,上短边与弹性腔体封闭侧端面连接。
9、优选的,所述第二骨架为横着的“j”形,其直线边与辅致动器的弹性腔体靠近蠕动泵一侧端面连接,辅致动器的柔性腔体的另一端为半球体密封连接外胸鳍端面。
10、优选的,所述柔性鳍面由硅胶制得,分为三段鳍面,上侧鳍面连接在第一骨架与主致动器之间,中间鳍面连接在主致动器和辅致动器之间,下侧鳍面连接在第二骨架与辅致动器之间。
11、本发明所述所述基于液动软体致动器的仿蝠鲼胸鳍的参数优化方法,包括以下步骤:
12、(1)设定影响主致动器的弹性腔体的半圆腔室的半径rz,壁厚tz,长度lz,第一中间层厚度tz1;计算主致动器通入压力p的流体,主致动器的弯曲角度θ,压力p与弯曲角度θ的关系为
13、
14、式中,r为致动器半圆腔室半径,t1为壁厚,mθ为主致动器外部上层和底层应力的组合力矩;
15、(2)判断主致动器的弯曲角度θ与蝠鲼最优扑动幅值θz的关系,
16、当θ≠θz时,则通过求取最值优化主致动器的结构参数,实现压力p下主致动器的弯曲角度尽可能接近蝠鲼最优扑动幅值θz,具体如下:
17、
18、式中,ai,i∈[1,10]均为正整数;
19、确认辅致动器的位置,即计算辅致动器与主致动器之间的距离l1:
20、
21、式中,n为胸鳍波数,为主/辅致动器的相位差,l为蝠鲼弦向方向的长度;
22、(3)确认辅致动器的位置后,设定辅致动器的弹性腔体的半圆腔室的半径rf,壁厚tf,长度lf和第二中间层厚度tf1,计算辅致动器通入与主致动器相同的压力p的流体,辅致动器的弯曲角度θ1;
23、(4)判断辅致动器的弯曲角度θ1与蝠鲼最优俯仰角θf关系,当θ1≠θz-θf时,则通过求取最值方法优化辅致动器的结构参数,在同样的压力p下辅致动器与主致动器之间的夹角尽可能接近目标值;
24、有益效果:本发明与现有技术相比,其显著优点是:1、本发明所述基于液动软体致动器仿蝠鲼胸鳍结构简单,利用不同硬度硅胶打印模仿蝠鲼胸鳍,柔性鳍面和主辅致动器的腔体采用软硅橡胶材质,中间限制板、限制线和骨架采用硬质硅橡胶;实现对仿蝠鲼胸鳍的结构的简便控制,一个胸鳍扑动仅需要一个蠕动泵控制,通过蠕动泵将主辅致动器一半腔室的液体输入到另一半腔室,从而实现胸鳍的弯曲变形,前进时,两个蠕动泵同时工作;转弯只要一个蠕动泵工作;2、本发明所述参数优化方法,简化了对于蝠鲼胸鳍设计复杂的问题,根据对致动器建立的数学模型,通过求取最值的方法结合优化模型调整致动器的结构参数,使其达到蝠鲼游动参数最优值。
技术特征:1.一种基于液动软体致动器的仿蝠鲼胸鳍,包括左蠕动泵(14)、右蠕动泵(21)和镜像设置的左胸鳍(1)、右胸鳍(2),其特征在于,左胸鳍(1)和右胸鳍(2)的弹性基体(13)上均设有主致动器(11)和辅致动器(12),主致动器和辅致动器通过管道(3)与蠕动泵连接,主致动器(11)和辅致动器(12)均包括弹性腔体和中间限制板,弹性腔体包括圆柱形空腔,空腔由中间层划分为对称的上、下半圆空腔,每个半圆空腔均设有接口与管道(3)连接;中间限制板为矩形硬质材料板,设置在弹性腔体的中间层表面;当上半圆腔室冲入高压流体时,主/辅致动器向下弯曲,当下半圆腔室冲入高压流体时,主/辅致动器向上弯曲。
2.根据权利要求1所述基于液动软体致动器的仿蝠鲼胸鳍,其特征在于,当主致动器和辅致动器同方向弯曲时,主致动器和辅致动器的上半圆腔室通过管道与蠕动泵形成回路一,主致动器和辅致动器的下半圆腔室通过管道与蠕动泵形成回路二,向上扑动时,蠕动泵将上半圆腔室的液体抽到下半圆腔室中,向下扑动时,则相反。
3.根据权利要求1所述基于液动软体致动器的仿蝠鲼胸鳍,其特征在于,当主致动器和辅致动器反方向弯曲时,主致动器和辅致动器的上半圆腔室和下半圆腔室通过管道与蠕动泵分别形成回路三和回路四,当向上扑动时,蠕动泵将主致动器的上半圆腔室的液体抽到主致动器的下半圆腔室,将辅致动器的下半圆腔室的液体抽到辅致动器的上半圆腔室,向下扑动时,则相反;扑动方向由主致动器的弯曲方向决定。
4.根据权利要求1所述基于液动软体致动器的仿蝠鲼胸鳍,其特征在于,所述主致动器(11)和辅致动器(12)还包括限制线,限制线由多根侧线和两根顶线组成,侧线为圆环状,沿着弹性腔体轴向方向均匀分布,布置在腔体表面,顶线依次连接每根侧线且布置在弹性腔体的上下表面。
5.根据权利要求4所述基于液动软体致动器的仿蝠鲼胸鳍,其特征在于,所述限制线由硬质硅胶材料制得。
6.根据权利要求1所述基于液动软体致动器的仿蝠鲼胸鳍,其特征在于,所述弹性腔体由硅胶制得。
7.根据权利要求1所述基于液动软体致动器的仿蝠鲼胸鳍,其特征在于,所述弹性基体包括第一骨架、第二骨架和柔性鳍面,第一骨架和第二骨架由硬质硅胶制得,第一骨架为无斜边的梯形,其下长边与主致动器(11)的弹性腔体靠近蠕动泵一侧端面连接,上短边与弹性腔体封闭侧端面连接。
8.根据权利要求7所述基于液动软体致动器的仿蝠鲼胸鳍,其特征在于,所述第二骨架为横着的“j”形,其直线边与辅致动器(12)的弹性腔体靠近蠕动泵一侧端面连接,辅致动器(12)的柔性腔体的另一端为半球体密封连接外胸鳍端面。
9.根据权利要求8所述基于液动软体致动器的仿蝠鲼胸鳍,其特征在于,所述柔性鳍面由硅胶制得,分为三段鳍面,上侧鳍面连接在第一骨架与主致动器之间,中间鳍面连接在主致动器和辅致动器之间,下侧鳍面连接在第二骨架与辅致动器之间。
10.一种权利要求1-9任一项所述基于液动软体致动器的仿蝠鲼胸鳍的参数优化方法,其特征在于,包括以下步骤:
技术总结本发明公开了一种基于液动软体致动器的仿蝠鲼胸鳍及其参数优化方法,所述蝠鲼胸鳍,包括主致动、辅致动器和蠕动泵,主致动器和辅致动器均包括弹性腔体和中间限制板,弹性腔体包括圆柱形空腔,空腔由中间层划分为上、下半圆空腔;中间限制板为矩形硬质材料板,设置在弹性腔体的中间层表面。当主致动器和辅致动器同方向弯曲时,向上扑动,蠕动泵将上半圆腔室的液体抽到下半圆腔室中,向下扑动,则相反。当主致动器和辅致动器反方向弯曲时,向上扑动,蠕动泵将主致动器的上半圆腔室的液体抽到主致动器的下半圆腔室,将辅致动器的下半圆腔室的液体抽到辅致动器的上半圆腔室,向下扑动时,则相反;扑动方向由主致动器的弯曲方向决定。技术研发人员:苏世杰,刁含鹏,王海荣,张建,展铭,殷宝吉受保护的技术使用者:江苏科技大学技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240722/226834.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表