-
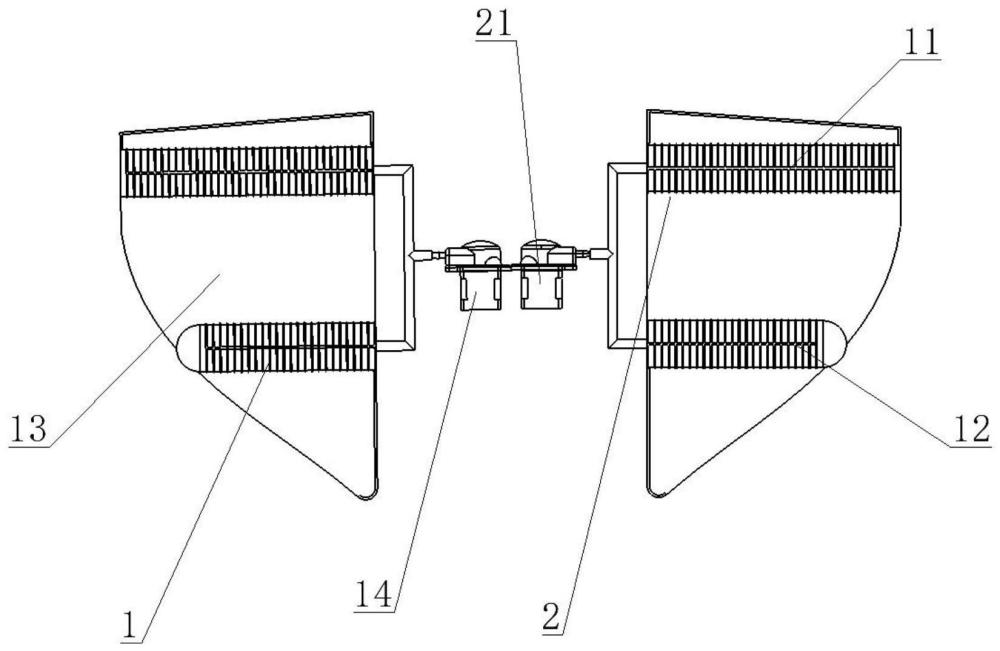
一种基于液动软体致动器的仿蝠鲼胸鳍及其参数优化方法
本发明涉及水下仿生机器人,尤其涉及一种基于液动软体致动器的仿蝠鲼胸鳍及其参数优化方法。背景技术:1、刚性机器人受到外部环境的限制性较高,执行过程中不够灵活。为了弥补传统机器人的不足,软体机器人的研究领......
-
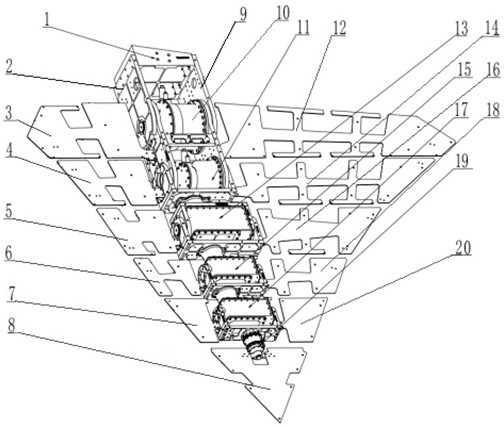
一种刚柔耦合仿生胸鳍推进装置的制作方法
本发明属于仿生鱼机械结构,特别涉及一种高驱动功率、多自由度的刚柔耦合仿生胸鳍推进装置。背景技术:1、近年来,随着仿生学和机器人学研究的不断进步,以鱼类为模仿对象,进行仿生鱼水下推进技术的研究已经成为新......
-
一种仿鲹科鱼类胸鳍的水下机器人
本发明属于水下机器人领域,更具体地,涉及一种仿鲹科鱼类胸鳍的水下机器人。背景技术:1、水下机器人一直是科学研究中一个特别有吸引力的课题,几十年来随着科学的发展,研究者们设计了各式各样的水下机器人,其性......
-
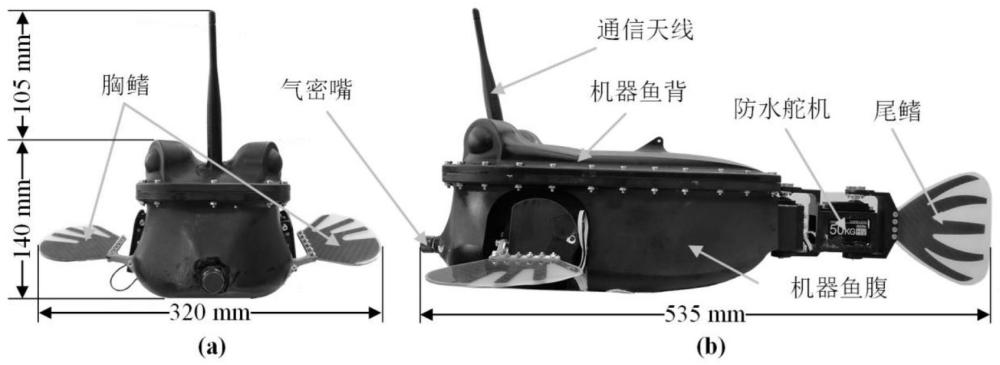
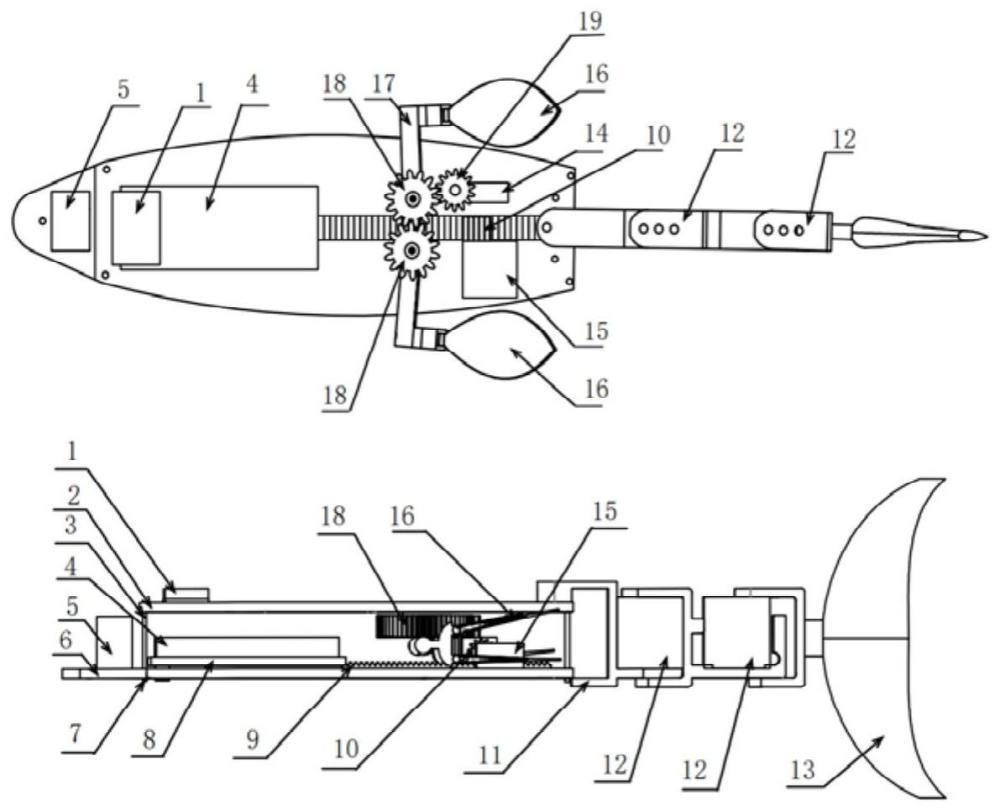
一种胸鳍和尾鳍协同推进的仿生机器鱼及其控制方法
本发明属于仿生水下机器人应用,涉及到包括外形结构设计、驱动系统、通信系统和控制算法在内的仿生机器鱼的整体样机设计,具体涉及一种胸鳍与尾鳍协同推进的仿生机器鱼及其控制方法。背景技术:1、在河流和海洋等水......
-
一种基于飞鱼胸鳍特征可增大升力的仿生柔性机翼
本发明涉及仿生柔性机翼领域,具体涉及一种基于飞鱼胸鳍特征的高升力仿生柔性机翼。背景技术:1、随着微型飞行器的发展,对飞行器的气动性能要求越来越高。传统刚性固定翼阵风适应性较差,遇到复杂气流时很难保持稳......
技术新讯 > 胸鳍 > 列表
 2024-08-01
2024-08-01精选技术
-
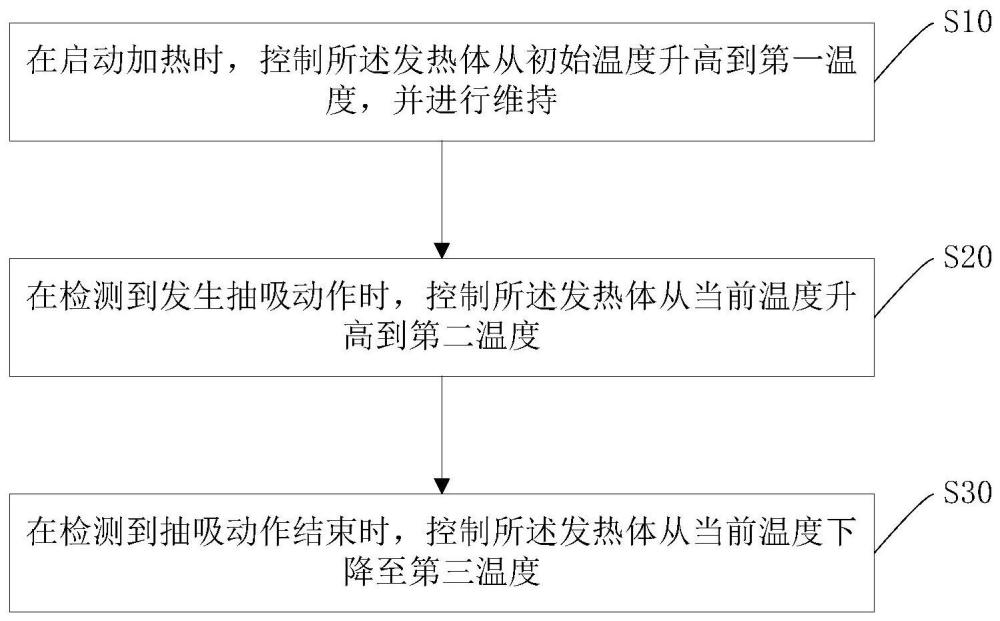
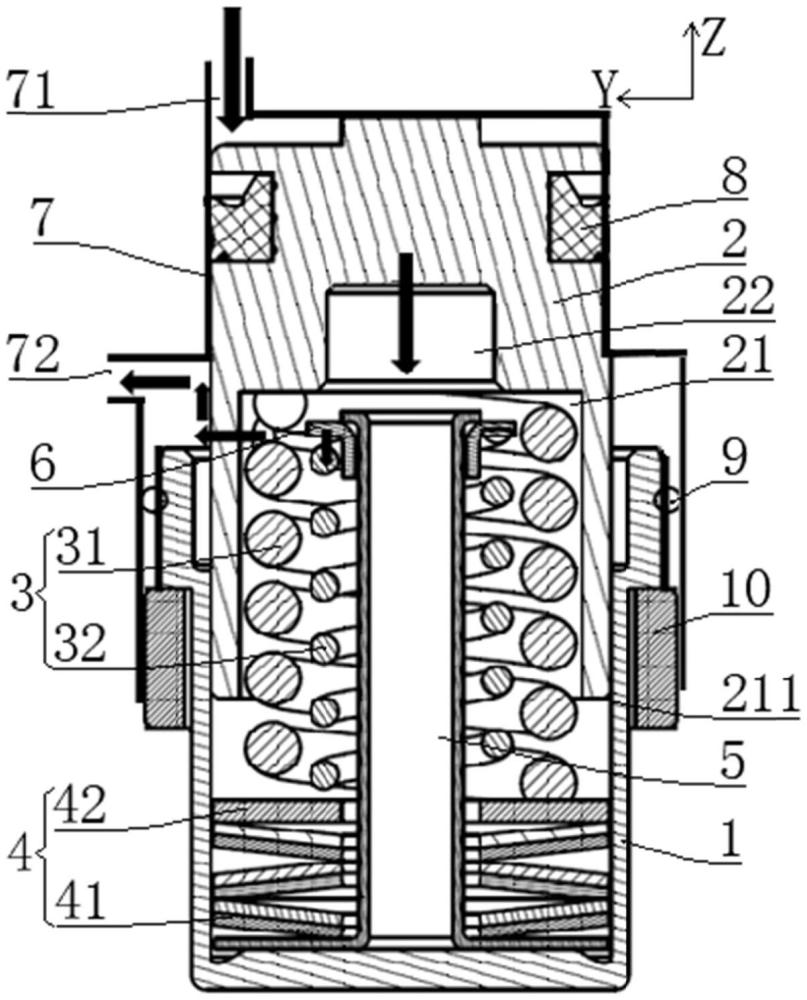
发热体、加热不燃烧装置及其加热控制方法与流程
2024-11-19 -

一种大容纳的紧急物资装备包的制作方法
2024-07-05 -
一种踏板感模拟器及汽车的制作方法
2024-08-02 -

一种隐藏式消火栓箱的制作方法
2024-07-05 -
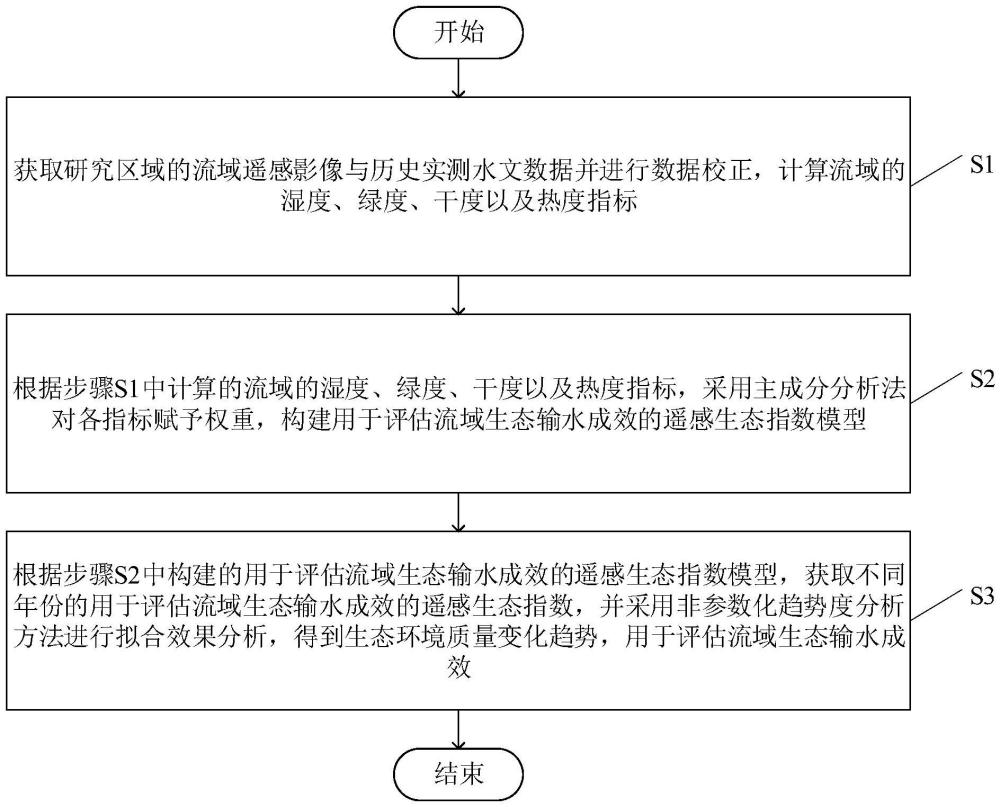
一种流域生态输水成效评估方法
2024-12-06 -

用于T梁转运的装置及方法与流程
2024-08-02 -

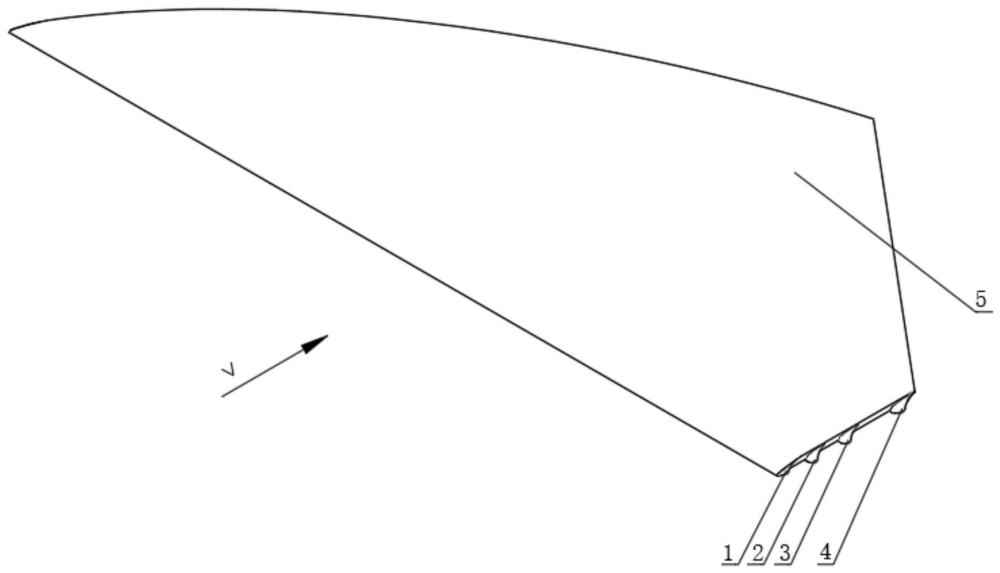
船艏导缆孔连接过渡装置的制作方法
2024-08-01 -
一种MEMS触觉传感器及其制作方法与流程
2024-07-27 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15