一种刚柔耦合仿生胸鳍推进装置的制作方法
- 国知局
- 2024-08-01 07:05:00
本发明属于仿生鱼机械结构,特别涉及一种高驱动功率、多自由度的刚柔耦合仿生胸鳍推进装置。
背景技术:
1、近年来,随着仿生学和机器人学研究的不断进步,以鱼类为模仿对象,进行仿生鱼水下推进技术的研究已经成为新型水下推进系统研究的热点。鱼类的推进模式可大致分为中央鳍/对鳍推进模式(mpf)和身体/尾鳍推进(bcf)两类,其中mpf推进模式的鱼类,因胸鳍具有多关节软骨、肌群等构成的柔性推进系统,在推进效率、机动性方面较bcf推进模式优势明显。胸鳍运动可视为展向拍动和弦向扭动的耦合,经由软骨肌肉的驱动与传导,表现出强柔性特征。受驱动器功率密度、材料性能、空间体积等因素的限制,现有仿生胸鳍推进装置在仿生相似度、关节自由度、驱动功率、外形设计等方面仍有不足之处,无法良好复现原生柔性结构特征,在推进效率、机动性等方面与生物原型相比存在较大差距。
技术实现思路
1、本发明所解决的技术问题是提供一种刚柔耦合仿生胸鳍推进装置,通过串联式组合机构驱动内部骨架分别绕展向和弦向方向运动,与骨架相连的前后柔性鳍条沿鳍线随动,继而实现多自由度可控的鳍面柔性变形,解决了现有mpf仿生推进平台的推进效率低、机动性差和仿生相似度低的问题。
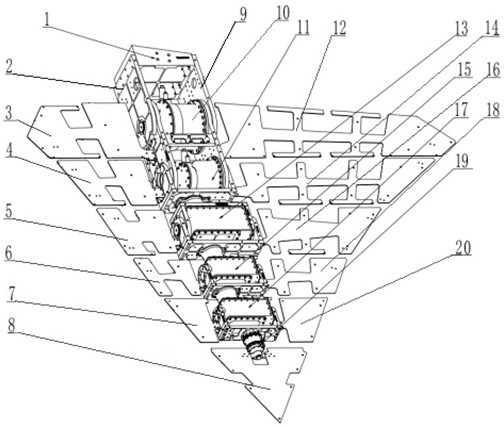
2、本发明采用的技术方案是: 一种刚柔耦合仿生胸鳍推进装置,包括串联多关节驱动组件、柔性鳍条组件和仿形壳体组件,所述串联多关节驱动组件由第一驱动单元、第二驱动单元、第三四驱动单元、第五六驱动单元、第七八驱动单元和第九驱动单元依次串联,其中第一驱动单元和第二驱动单元沿展向拍动,第三四驱动单元、第五六驱动单元、第七八驱动单元为双自由度驱动单元,其运动关节自由度方向均为弦向+展向,第九驱动单元沿弦向扭动,所述柔性鳍条组件包括前鳍条组件、后鳍条组件和中鳍条,其中前鳍条组件、后鳍条组件各为五个柔性鳍条,前鳍条组件和后鳍条组件的柔性鳍条依次分别与第一驱动单元、第二驱动单元、第三四驱动单元、第五六驱动单元、第七八驱动单元的前后展向接口连接,中鳍条与第九驱动单元连接,柔性鳍条组件的各个节点处安装有仿形壳体组件。
3、优选的,所述第三四驱动单元、第五六驱动单元、第七八驱动单元的双自由度驱动单元为通过交叉方向的双自由度一体化电机实现弦向运动和展向运动。
4、优选的,所述柔性鳍条组件中相邻前鳍条边缘处通过弹性结构连接,相邻后鳍条边缘处通过弹性结构连接,所述弹性结构为拉簧、布料或橡胶,使仿生胸鳍前后缘在水流冲击下保持连续。
5、优选的,所述仿形壳体组件按照柔性鳍条结构划分为多个壳体单元,每个壳体单元中的上壳体与下壳体使用螺栓依次安装在对应柔性鳍条接口上,每个壳体单元的外轮廓组成仿生胸鳍形状。
6、优选的,所述串联多关节驱动组件的每一个驱动单元均包括驱动框架和电机,所述驱动框架由前侧板、后侧板和横板组成,前侧板和后侧板相平行布置,前侧板和后侧板之间通过横板连接组成框架结构,电机固定安装在对应的驱动框架上,鳍根部的驱动框架的前侧板和后侧板分别与前固定侧板和后固定侧板轴连接,通过展向电机驱动前侧板和后侧板相对于前固定侧板和后固定侧板沿展向转动,前固定侧板和后固定侧板固定连接躯干固定架,相邻的驱动单元均为后一个驱动框架通过展向电机驱动使其前侧板和后侧板相对于前一个驱动框架的前侧板和后侧板沿展向转动,其中第三四驱动单元、第五六驱动单元、第七八驱动单元的电机为展向电机和弦向电机共同组成的一体化电机,其弦向电机的输出轴端部连接于前一个驱动框架的横板,输出轴上连接后一个驱动框架的横板,通过弦向电机驱动使后一个驱动框架的横板相对于前一个驱动框架的横板沿弦向转动,鳍尖部最后一个电机为弦向电机,所述弦向电机固定安装在前一个驱动框架的横板上弦向电机发输出轴上安装第九驱动框架,第九驱动框架上安装中鳍条。
7、优选的,所述串联多关节驱动组件的驱动方向依次为展向-展向-弦向-展向-弦向-展向-弦向-展向-弦向。
8、优选的,所述柔性鳍条为树状结构,鳍条截面宽度随长度变化,树杈(树枝)处用于安装仿形壳体,树干端部与各个驱动单元连接,仿形壳体内部镂空不干涉柔性鳍条随驱动单元的运动。
9、本发明的有益效果是:本发明提供了一种高驱动功率、多自由度的刚柔耦合仿生胸鳍推进装置,通过串联多关节驱动组件驱动内部框架分别绕展向和弦向方向运动,每个电机的输出轴单独提供一个方向的驱动力,与框架相连的前后柔性鳍条沿鳍线随动,继而实现多自由度可控的鳍面柔性变形,从而提升现有mpf仿生推进平台的推进效率和机动性,对水下机器人推进技术的发展有着重要的意义。
技术特征:1.一种刚柔耦合仿生胸鳍推进装置,其特征在于:包括串联多关节驱动组件、柔性鳍条组件和仿形壳体组件,所述串联多关节驱动组件由第一驱动单元、第二驱动单元、第三四驱动单元、第五六驱动单元、第七八驱动单元和第九驱动单元依次串联,其中第一驱动单元和第二驱动单元沿展向拍动,第三四驱动单元、第五六驱动单元、第七八驱动单元为双自由度驱动单元,其运动关节自由度方向均为弦向+展向,第九驱动单元沿弦向扭动,所述柔性鳍条组件包括前鳍条组件、后鳍条组件和中鳍条,其中前鳍条组件、后鳍条组件各为五个柔性鳍条,前鳍条组件和后鳍条组件的柔性鳍条依次分别与第一驱动单元、第二驱动单元、第三四驱动单元、第五六驱动单元、第七八驱动单元的前后展向接口连接,中鳍条与第九驱动单元连接,柔性鳍条组件的各个节点处安装有仿形壳体组件。
2.根据权利要求1所述的一种刚柔耦合仿生胸鳍推进装置,其特征在于:所述第三四驱动单元、第五六驱动单元、第七八驱动单元的双自由度驱动单元为通过交叉方向的双自由度一体化电机实现弦向运动和展向运动。
3.根据权利要求1所述的一种刚柔耦合仿生胸鳍推进装置,其特征在于:所述柔性鳍条组件中相邻前鳍条边缘处通过弹性结构连接,相邻后鳍条边缘处通过弹性结构连接,所述弹性结构为拉簧、布料或橡胶,使仿生胸鳍前后缘在水流冲击下保持连续。
4.根据权利要求1所述的一种刚柔耦合仿生胸鳍推进装置,其特征在于:所述仿形壳体组件按照柔性鳍条结构划分为多个壳体单元,每个壳体单元中的上壳体与下壳体使用螺栓依次安装在对应柔性鳍条接口上,每个壳体单元的外轮廓组成仿生胸鳍形状。
5.根据权利要求1所述的一种刚柔耦合仿生胸鳍推进装置,其特征在于:所述串联多关节驱动组件的每一个驱动单元均包括驱动框架和电机,所述驱动框架由前侧板、后侧板和横板组成,前侧板和后侧板相平行布置,前侧板和后侧板之间通过横板连接组成框架结构,电机固定安装在对应的驱动框架上,鳍根部的驱动框架的前侧板和后侧板分别与前固定侧板和后固定侧板轴连接,通过展向电机驱动前侧板和后侧板相对于前固定侧板和后固定侧板沿展向转动,前固定侧板和后固定侧板固定连接躯干固定架,相邻的驱动单元均为后一个驱动框架通过展向电机驱动使其前侧板和后侧板相对于前一个驱动框架的前侧板和后侧板沿展向转动,其中第三四驱动单元、第五六驱动单元、第七八驱动单元的电机为展向电机和弦向电机共同组成的一体化电机,其弦向电机的输出轴端部连接于前一个驱动框架的横板,输出轴上连接后一个驱动框架的横板,通过弦向电机驱动使后一个驱动框架的横板相对于前一个驱动框架的横板沿弦向转动,鳍尖部最后一个电机为弦向电机,所述弦向电机固定安装在前一个驱动框架的横板上弦向电机发输出轴上安装第九驱动框架,第九驱动框架上安装中鳍条。
6.根据权利要求1所述的一种刚柔耦合仿生胸鳍推进装置,其特征在于:所述串联多关节驱动组件的驱动方向依次为展向-展向-弦向-展向-弦向-展向-弦向-展向-弦向。
7.根据权利要求1所述的一种刚柔耦合仿生胸鳍推进装置,其特征在于:所述柔性鳍条为树状结构,鳍条截面宽度随长度变化,树杈处用于安装仿形壳体。
技术总结本发明提供一种刚柔耦合仿生胸鳍推进装置,包括串联多关节驱动组件、柔性鳍条组件和仿形壳体组件,串联多关节驱动组件的前后两侧安装柔性鳍条组件,柔性鳍条组件上安装仿形壳体组件将串联多关节驱动组件和柔性鳍条组件包裹其中。本发明的刚柔耦合仿生胸鳍推进装置通过串联多关节驱动组件驱动内部框架分别绕展向和弦向方向运动,每个电机的输出轴单独提供一个方向的驱动力,与框架相连的前后柔性鳍条沿鳍线随动,继而实现多自由度可控的鳍面柔性变形,从而提升现有MPF仿生推进平台的推进效率和机动性,对水下机器人推进技术的发展有着重要的意义。技术研发人员:吕昊,裴允嘉,苏宗帅,王宝新,高存强,王猛,王明,李对对,高超,许艳云,回志姗,朱秀峰,王子艺受保护的技术使用者:沈阳航天新光集团有限公司技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240722/226036.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表