一种带有快速反应主动控制悬架系统的高速双体无人艇的制作方法
- 国知局
- 2024-08-01 07:20:47
本发明涉及双体无人艇,尤其涉及一种带有快速反应主动控制悬架系统的高速双体无人艇。
背景技术:
1、随着无人控制技术的不断发展,作为一种无人平台,无人艇在探矿、排除障碍、某些危险领域或特种环境中能够替代有人平台,不仅可以降低这些领域从业的危险性,且可以达到事半功倍的效果。
2、在公开号为cn 114379699 b的中国专利中,公开了一种悬挂式双体靶船,涉及靶船领域。靶船包括船体甲板、悬架结构和两个浮力单体,悬架结构连接于两个浮力单体的上侧,船体甲板安装于悬架结构上;悬架结构包括至少两个悬架组件,悬架组件包括上基座、下基座以及两个支杆,上基座与下基座呈上下间隔设置,两个支杆沿船体甲板的宽度方向间隔设置,两个支杆均铰接于上基座和下基座之间,上基座、下基座以及两个支杆组成四连杆机构,且上基座与下基座之间安装有减震器和拉紧器;船体甲板上还安装有主控制器、加速度传感器和侧倾传感器,主控制器分别与加速度传感器、侧倾传感器和两个悬架组件的拉紧器电连接,以根据航行颠簸信号和侧倾信号控制悬架组件的拉紧器收放减震器至相应行程。
3、然而现有技术在使用时,通过设计悬架系统以及拉紧器实现了:根据颠簸信号控制悬架组件的拉紧器收放减震器至相应行程,以调整悬架组件的弹力强度和支撑高度,可更好地适应航行过程中的海面波浪起伏;侧倾传感器用于检测船体甲板的侧倾程度并产生倾斜角度电信号,根据倾斜角度控制悬架组件的拉紧器收放减震器至相应行程,以调整对应侧悬架组件的支撑高度,从而补偿高机动转弯时船体甲板的侧倾变化,而申请人发现,对于无人艇产品,现有技术对于波浪导致的船体纵摇和垂荡现象,无法很多的对安装上层平台的无人艇很好的支撑,在产生船体纵摇和垂荡现象时,上层平台无法保持平稳。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的问题,而提出的一种带有快速反应主动控制悬架系统的高速双体无人艇。
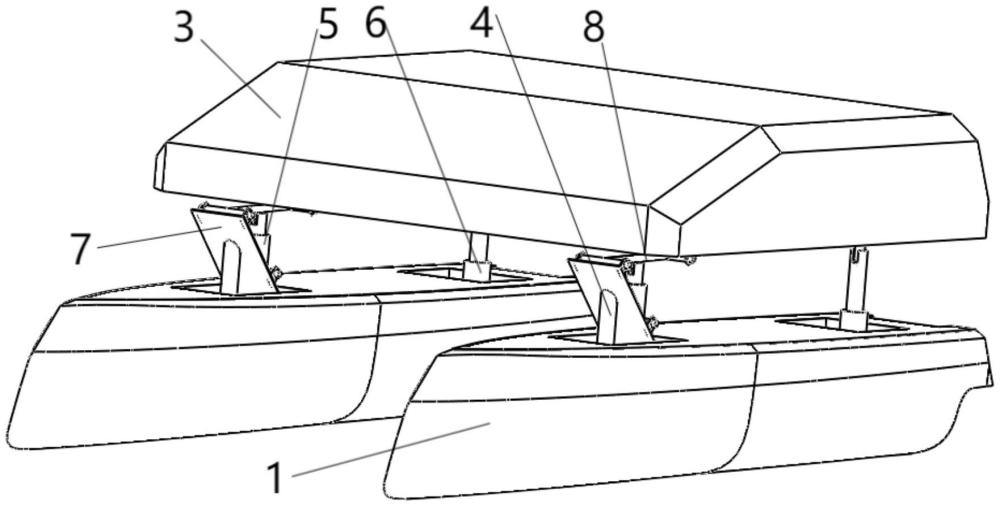
2、为了实现上述目的,本发明采用了如下技术方案:一种带有快速反应主动控制悬架系统的高速双体无人艇,包括双体船船体,所述双体船船体的一侧设置有舷外机,用于为双体船船体提供推进力,所述双体船船体的两个船体上均设置有悬架系统,且双体船船体通过悬架系统安装有上层设备平台;
3、所述悬架系统包括安装于船体前方的第一伸缩补偿装置和安装于船体后方的第三伸缩补偿装置,所述第一伸缩补偿装置的顶部安装有基板,所述基板另一面的两侧均通过铰链分别转动安装有行程增加杆和第二伸缩补偿装置,所述行程增加杆的另一端和第三伸缩补偿装置的伸缩端均通过铰链分别与上层设备平台的底部两侧转动连接,且第二伸缩补偿装置的伸缩端与行程增加杆底部相抵设置。
4、优选地,所述第一伸缩补偿装置、第二伸缩补偿装置以及第三伸缩补偿装置均为液压缸。
5、优选地,还包括控制系统,所述控制系统包括设置于船体内部的能源设备、安装于上层设备平台内控制器系统、以及分别设置在船体内部以及上层设备平台内的两个姿态传感器,所述姿态传感器通过控制器系统与第一伸缩补偿装置和安装于船体后方的第三伸缩补偿装置电性连接。
6、优选地,所述船体的后部采用凹陷设计,所述舷外机设置在该凹陷部位。
7、优选地,所述第一伸缩补偿装置的伸缩端呈斜面状设计,所述基板倾斜安装在该斜面上。
8、优选地,所述行程增加杆的初始位置采用水平设计,该位置下,其末端初始速度为最大值,从而获得最大的初始补偿速度。
9、优选地,所述第二伸缩补偿装置的伸缩端端部安装有柔性层,所述柔性层与行程增加杆底部相抵,所述柔性层的上端安装有柔性套环,且柔性套环套设于行程增加杆外侧。
10、一种高速双体无人艇的主动控制悬架系统的方法,采用一种带有快速反应主动控制悬架系统的高速双体无人艇,包括以下步骤:
11、获取船体的纵摇,垂荡信息,以及上方设备平台的初始姿态信息;
12、对该信息进行解算,得到每个第一伸缩补偿装置、第二伸缩补偿装置以及第三伸缩补偿装置伸缩端部位的长度;
13、根据上方设备平台的的位置控制第一伸缩补偿装置、第二伸缩补偿装置以及第三伸缩补偿装置的行程动作,由第一伸缩补偿装置单独控制纵摇补偿,第二伸缩补偿装置以及第三伸缩补偿装置补偿垂荡。
14、与现有技术相比,本发明的有益效果是:
15、本发明通过设置的行程增加杆、第一伸缩补偿装置、第二伸缩补偿装置以及第三伸缩补偿装置,在产生船体纵摇和垂荡现象时,根据船体的姿态,第二伸缩补偿装置用于补偿纵摇,第一伸缩补偿装置和第三伸缩补偿装置一起用于补偿垂荡,让上层设备平台保持水平,而行程增加杆的设计,可以增加初始位置补偿速度,让上层平台补偿角速度增加,从而提高补偿速度,避免了第一伸缩补偿装置、第二伸缩补偿装置以及第三伸缩补偿装置由于需要支撑上层设备平台,需要采用大推力,导致速度缓慢的问题。
技术特征:1.一种带有快速反应主动控制悬架系统的高速双体无人艇,包括双体船船体,所述双体船船体的一侧设置有舷外机,用于为双体船船体提供推进力,其特征在于:所述双体船船体的两个船体上均设置有悬架系统,且双体船船体通过悬架系统安装有上层设备平台;
2.根据权利要求1所述的一种带有快速反应主动控制悬架系统的高速双体无人艇,其特征在于:所述第一伸缩补偿装置、第二伸缩补偿装置以及第三伸缩补偿装置均为液压缸。
3.根据权利要求2所述的一种带有快速反应主动控制悬架系统的高速双体无人艇,其特征在于:还包括控制系统,所述控制系统包括设置于船体内部的能源设备、安装于上层设备平台内控制器系统、以及分别设置在船体内部以及上层设备平台内的两个姿态传感器,所述姿态传感器通过控制器系统与第一伸缩补偿装置和安装于船体后方的第三伸缩补偿装置电性连接。
4.根据权利要求1所述的一种带有快速反应主动控制悬架系统的高速双体无人艇,其特征在于:所述船体的后部采用凹陷设计,所述舷外机设置在该凹陷部位。
5.根据权利要求3所述的一种带有快速反应主动控制悬架系统的高速双体无人艇,其特征在于:所述第一伸缩补偿装置的伸缩端呈斜面状设计,所述基板倾斜安装在该斜面上。
6.根据权利要求5所述的一种带有快速反应主动控制悬架系统的高速双体无人艇,其特征在于:所述行程增加杆的初始位置采用水平设计,该位置下,其末端初始速度为最大值,从而获得最大的初始补偿速度。
7.根据权利要求1所述的一种带有快速反应主动控制悬架系统的高速双体无人艇,其特征在于:所述第二伸缩补偿装置的伸缩端端部安装有柔性层,所述柔性层与行程增加杆底部相抵,所述柔性层的上端安装有柔性套环,且柔性套环套设于行程增加杆外侧。
8.根据权利要求1所述的一种带有快速反应主动控制悬架系统的高速双体无人艇,其特征在于:所述第二伸缩补偿装置的伸缩端端部通过转轴转动安装有抵压件,所述抵压件的顶部与行程增加杆底部相抵。
9.一种高速双体无人艇的主动控制悬架系统的方法,采用权利要求1-9任一项所述的一种带有快速反应主动控制悬架系统的高速双体无人艇,其特征在于:包括以下步骤:
技术总结本发明涉及双体无人艇技术领域,公开了一种带有快速反应主动控制悬架系统的高速双体无人艇,包括双体船船体,所述双体船船体的一侧设置有舷外机,用于为双体船船体提供推进力,所述双体船船体的两个船体上均设置有悬架系统,且双体船船体通过悬架系统安装有上层设备平台。本发明在产生船体纵摇和垂荡现象时,根据船体的姿态,第二伸缩补偿装置用于补偿纵摇,第一伸缩补偿装置和第三伸缩补偿装置一起用于补偿垂荡,让上层设备平台保持水平,而行程增加杆的设计,可以增加初始位置补偿速度,让上层平台补偿角速度增加,从而提高补偿速度。技术研发人员:张胜,姜俊涛,熊冶平,贾松宇,靖振宇,眭睦,樊石川受保护的技术使用者:江苏奇鱼智航科技有限公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240722/227196.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表