一种用于海洋装备清污探伤的无人船及其作业方法
- 国知局
- 2024-08-01 07:22:54
本发明属于海洋结构物水下清污探伤,具体地说,是涉及一种用于海洋装备清污探伤的无人船及其作业方法。
背景技术:
1、随着经济社会的不断发展,人们对能源的需求呈现日益增长的趋势。近年来,各国纷纷致力于推动海上能源产业的发展,包括海上风能、波浪能等,针对这些产业,设计建造了一系列高效的能源采集装置,如海上风力发电机、石油钻井平台和波浪能发电装置等。
2、然而,这些装置长期运行于海洋环境中,受到水下生物附着、风浪流等环境因素的影响,容易出现锈蚀、外表面裂纹等损伤问题。若这些附着物和损伤得不到及时清理修复,将严重影响海上结构物的工作效率和使用寿命。为了确保这些能源采集装置的正常运行,定期进行清污探伤工作至关重要。
3、目前,现行的定期维护清污探伤方法主要依赖于人工操作,但受制于海洋环境的好坏,当遭遇恶劣的海洋环境时,将无法及时进行清污探伤作业。此外,工作人员自身须携带笨重的清污和探伤设备,在进行探伤操作前需先利用清污装置清除水下结构物表面的附着物,以保证探伤精度。而后,又需要携带繁重的探伤设备进行探伤工作。这是一项极其危险又耗时的作业,不仅经济成本高、工作效率低,而且x光探伤装置对人体有辐射危害,严重损害了工作人员的身体健康。
技术实现思路
1、为克服现有技术的不足,本发明提出一种用于海洋装备清污探伤的无人船及其作业方法,通过潜航器自主导航至海洋装备对其结构表面附着物实施清除,并在清污后开展探伤工作;在找到探伤位置后,利用定位装置对损伤点进行精确定位以方便后续人工修复工作的开展;在遇到恶劣海洋环境而无法进行人工修复时,可采用定位装置内部的铝热装置对损伤结构进行初步抢修,解决了人工清污和探伤带来的风险系数大、成本高、工作效率低等一系列问题,起到良好的海洋平台或船舶锈蚀的修复效果,具有高安全系数、低经济成本和高工作效率的优点。
2、本发明采用以下技术方案予以实现:
3、提出一种用于海洋装备清污探伤的无人船,包括无人船本体;所述无人船本体内部配置电源及驱动机构;还包括:
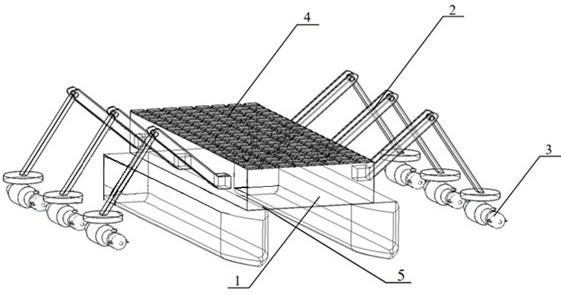
4、电磁吸附组件,由导向杆、电磁吸盘和第一电磁线圈组成;所述导向杆连接在所述无人船本体上,所述电磁吸盘组装于所述导向杆的末端,所述第一电磁线圈设置于所述电磁吸盘内部,并通过所述无人船本体的电源为所述第一电磁线圈供电;
5、潜航器,由潜航器本体、空化射流装置、探伤装置、定位装置组件、发射组件和磁性吸盘组成;其中,所述第一电磁线圈通电使所述电磁吸盘吸附所述磁性吸盘,将所述潜航器吸附在所述导向杆末端;所述第一电磁线圈断电时实现所述潜航器的释放;所述空化射流装置用于对海洋装备表面实施清污,安装于所述潜航器本体的前部;所述探伤装置用于对清污之后的海洋装备实施探伤,安装于所述潜航器本体的上端;所述定位装置组件由定位装置和电动轮盘组成,所述电动轮盘安装于所述潜航器主体前部中心位置,其内部设置若干储物箱,每个储物箱里布设若干定位装置;所述发射组件布设在所述电动轮盘后端,用于将储物箱内的定位装置发射出去以对损伤部位实施定位。
6、本发明还提出一种用于海洋装备清污探伤的无人船作业方法,应用于如上所述的用于海洋装备清污探伤的无人船中,包括:
7、s1:远程控制无人船到达目标海域;
8、s2:控制电磁吸附组件断电,使吸附在电磁吸盘的潜航器脱离并下潜至海平面以下;
9、s3:潜航器自主导航到达指定作业区域,通过所述空化射流装置对海洋设备的水下结构表面实施清污作业;
10、s4:清污作业完成后,通过所述探伤装置对清污部位实施水下结构物表面的检测;
11、s5:当检测到损伤部位后,潜航器航行至损伤部位设定范围内,所述发射组件将一个定位装置弹射出去;定位装置弹射同时通电,使得定位装置具有磁性而吸附在损伤部位,同时浮球基于浮力顶开镂空挡板并上浮,实现对损伤部位的定位;
12、s6:在人工修复时基于浮球位置定位损伤部位的位置,在无法实施人工修复作业时,通过所述定位装置前端的铝热装置对损伤部位实施抢修作业;
13、s7:清污探伤作业完成后,潜航器自动上浮至海面,电磁吸附组件通电,通过电磁吸盘吸附潜航器上部的磁性吸盘以实现潜航器的回收。
14、与现有技术相比,本发明的优点和积极效果是:本发明提出的用于海洋装备清污探伤的无人船及其作业方法中,电磁吸附组件吸附若干潜航器航行至目标海域,控制电磁吸附组件断电而释放潜航器;潜航器则基于自主导航潜行至海面下海洋设备结构表面,启动空化射流装置对结构表面实施清污作业;清污作业完成后,启动探伤装置对清污区域实施扫描检测,在发现损伤部位时,启动发射组件将一个定位装置发射到损伤部位,定位装置则对损伤部位实施定位,定位数据可用于后续人工修复时使用;本发明设计的无人船通过电磁吸附组件能够吸附多部潜航器,多部潜航器同时作业能扩大作业范围并显著提高作业效率;探伤之前通过空化射流装置对结构表面实施清污能够提高探伤精度,并能够避免人工探伤存在的危险度高和成本高的问题;定位装置能够对损伤部位实施定位而降低后续人工修复时对损伤部位的定位难度,具有高效、经济、安全的特点。
15、在本发明一些实施例中,多部所述电磁吸附组件安装于所述无人船本体的相对两侧;所述导向杆包括第一导向杆和第二导向杆;所述第一导向杆通过转轴连接所述第二导向杆,以使所述第二导向杆可相对所述第一导向杆改变二者之间的相对位置关系;所述电磁吸盘组装在所述第二导向杆的末端。
16、第一导向杆和第二导向杆通过转轴连接的结构,使得第二导向杆可以相对第一导向杆改变位置关系,释放潜航器时,转轴转动,使第二导向杆相对远离第一导向杆,从而远离无人船本体,一方面避免潜航器释放时候碰撞无人船本体,另一方面使得潜航器能够贴近海平面,使潜航器释放的更加平稳;同理的,当回收潜航器时,通过转轴转动而调整第二导向杆的位置,使电磁吸盘靠近潜航器,降低了潜航器的回收难度;回收潜航器后,转轴转动,使第二导向杆靠近第一导向杆,将潜航器回收到无人船本体跟前。
17、在本发明一些实施例中,所述空化射流装置由长导管喷头、电磁阀和第一储料箱组成;所述长导管喷头连通所述第一储料箱;所述电磁阀组装于所述长导管喷头上,受控于所述潜航器本体的控制系统;所述第一储料箱与所述潜航器本体通过球铰结构连接,球铰的底座挖空贯通,球头后设有伸长的杆,伸长的杆与所述潜航器本体内部的机械臂连接,所述机械臂受控于所述潜航器本体的控制系统,通过控制所述机械臂实现所述空化射流装置的自由角度移动。
18、潜航器潜行至海洋装备海面下指定区域的结构表面后,空化射流装置将第一储料箱内的清污材料通过长导管喷头喷射到结构物表面,并通过机械臂改变空化射流装置的作业角度,从不同角度对结构物表面实施清理,清污效率高且能够有效清除结构物表面的附着物,有助于提高探伤精度。
19、在本发明一些实施例中,所述电动轮盘的轮盘主体由两个环状轮盘、外圆周面和内圆周面组成腔体结构;所述环状轮盘通过滑轮与所述内圆周面转动连接;所述储物箱固定在所述环状轮盘的内壁,在所述内圆周面上设有开口卡槽;当转动所述环状轮盘使得所述储物箱位于所述开口卡槽上方时,所述储物箱底部的舱门打开,存储其内的定位装置受重力作用落入所述开口卡槽内。
20、定位装置组件中,多个储物箱挂接在环状轮盘的内侧,每个储物箱内存储至少一个定位装置,随着环状轮盘转动,一个储物箱位于开口卡槽上方,使得储物箱内的一个定位装置受重力作用落在开口卡槽中,当探伤装置检测到损伤部位后,发射组件作用在开口卡槽,将其内的定位装置向损伤部位发射出去;可在储物箱内布设传感器,通过传感器的检测信号判断储物箱内是否还有定位装置,当一个储物箱内的定位装置用完后,控制环状轮盘转动,让另一个储物箱位于开口卡槽上方。
21、在本发明一些实施例中,所述定位装置由浮球腔室、第一卷扬装置、通用开关、蓄电池、铝热装置、第二电磁线圈和镂空挡板组成;所述第一卷扬装置布设在所述浮球腔室内,一浮球通过缆绳连接所述第一卷扬装置;所述浮球腔室的顶部布设所述镂空挡板;所述蓄电池通过导线接通所述第二电磁线圈和所述通用开关;所述通用开关被触发后形成电流回路,使所述第二电磁线圈产生磁性,使得所述定位装置能够被吸附在损伤部位;在所述定位装置被发射出去后,海水通过所述镂空挡板进入所述浮球腔室,所述浮球在海水的作用下顶开所述镂空挡板并上浮至海面;所述铝热装置设置在所述定位装置的前部,由修复圆盘、导管和第二储料箱组成,且安装有电磁阀,在需要执行抢修作业时,所述无人船本体发出指令使所述电磁阀导通,所述铝热装置进行抢修作业。
22、当定位装置被发射组件发射出去时,通用开关被启动,蓄电池为第二电磁线圈供电,使得定位装置产生磁性而吸附在损伤部位,同时,海水通过镂空挡板进入浮球腔室,使得浮球在浮力作用下顶开镂空挡板,上浮至海面,当人工修复时,通过浮在海面的浮球即可对损伤部位实施定位,降低了修复人员找寻损伤部位的难度。当基于浮球位置定位损伤部位后,定位装置可通过第一卷扬装置的作用被拉回海面(浮球浮力大于定位装置重量),以便后续的继续利用。若遇到极端天气而无法进行人工修复时,定位装置前端的铝热装置可先进行初步的抢修作业。
23、在本发明一些实施例中,所述发射组件包括质量块、与所述质量块固定连接的弹簧、连杆、缆绳和第二卷扬装置组成;所述弹簧缠绕在所述连杆上,所述质量块与所述连杆滑动连接;所述质量块连接所述缆绳,所述缆绳与所述第二卷扬装置连接,所述第二卷扬装置通过拉伸所述缆绳来压缩或释放所述弹簧。
24、发射组件布设在开口卡槽的后方,需要发射定位装置时,启动第二卷扬装置,释放缆绳而让压缩的弹簧展开,使得质量块推动定位装置而将其发射出去,同时质量块触碰到定位装置的通用开关,使得定位装置的第二电磁线圈通电而带有磁性,从而能够吸附在损伤部位;之后第二卷扬装置再反向拉伸缆绳而压缩弹簧等待下一次发射作业。
25、在本发明一些实施例中,所述无人船本体的甲板下部固定有介电弹性体发电装置;所述介电弹性体发电装置由圆筒、轴承、介电弹性体薄膜和镂空转片组成;所述镂空转片呈放射状的固定在所述圆筒上,所述轴承沿所述圆筒的轴向固定在圆筒中心;所述介电弹性体薄膜一侧固定连接所述轴承,一侧固定连接于所述镂空转片的上端。
26、执行过程中,波浪带动镂空转片转动,镂空转片带动圆筒沿着轴承做不定期往复运动,位于圆筒两侧介电弹性体薄膜随着圆筒的左右运动做往复拉伸运动而产生机械能,再将机械能转化为电能,该电能能够作为无人船的备用电源,保障极端环境下用电的需求。
27、在本发明一些实施例中,所述无人船本体的甲板上部布设有太阳能光伏板。
28、太阳能光伏板采用硅晶体材料制成,固定在无人船的甲板上。基于光电效应,将光能转换为电能,存储在电池中,作为无人船的后备能源。
29、在本发明一些实施例中,所述潜航器的腹部安装有用于回收定位装置的回收装置;所述回收装置由第三卷扬装置、铁块和钢缆组成;所述铁块连接在所述钢缆的一端,所述钢缆另一端连接所述第三卷扬装置;在所述定位装置发射失败而沉入海底时,其定位数据发送给所述潜航器,所述潜航器基于定位数据航行至所述定位装置的上方,释放所述回收装置的铁块,所述铁块吸附所述定位装置后,所述第三卷扬装置拉收所述定位装置。
30、定位装置也存在发射失败的情况,如果发射失败,定位装置可能会掉落到海底,为了应对该情况,在潜航器的腹部安装回收装置;定位装置发射时瞬间通电而具有磁性,因此,当潜航器根据其定位数据航行至其上方后,回收装置的铁块被释放出来,铁块下沉到定位装置附近而被定位装置吸附上,然后通过第三卷扬装置回收钢缆,从而实现定位装置回收功能。
31、结合附图阅读本发明实施方式的详细描述后,本发明的其他特点和优点将变得更加清楚。
本文地址:https://www.jishuxx.com/zhuanli/20240722/227320.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表