一种遥控式水上救援器
- 国知局
- 2024-08-01 07:24:21
本公开涉及救生设备制备领域,具体涉及一种遥控式水上救援器。
背景技术:
1、目前对于救生装备的投掷主要为人工投掷,这种投掷方式较为简单,但投掷的范围较近,对于远距离的救援无法起到快速、高效的作用,耽误了最佳的救援时间,并且大多数内陆水域配备的救援设施较为简陋,多为数量不多的单体式塑料救生圈,长期的闲置使得其部分外部结构氧化,可能存在一定的安全隐患,如何在有限的时间内对落水人员实施救援已成为急需解决的问题。
2、经检索可知,现有技术中,例如专利cn202122656306.0公开了一种喷泵双驱动的水上紧急救援器,包括:两个驱动臂、以及弧形的承载体,所述驱动臂平行设置在承载体的两端,所述驱动臂包括壳体,通过所述壳体与所述承载体固定,在所述驱动臂内部设置喷水推进器产生向后的水流,从而推动承载体前行。上述喷泵双驱动的水上紧急救援器在实际应用中还存在以下缺陷:
3、其一,采用两个驱动臂、以及弧形的承载体所形成的水上紧急救援器在波浪运动较明显水域情况时,难以迎浪航行,容易被大浪冲翻,由于弧形结构的承载体受力集中,提供的浮力不稳定,发生侧翻和后翻的概率较大;并且在营救过程中若需要掉头,弧形结构的承载体无法以其自身重心做回旋运动,以至于不能灵活转向;
4、其二,驱动臂平行设置在承载体的两端,驱动臂内部设置喷水推进器产生向后的水流,从而推动承载体前行。上述驱动臂结合喷水推进器的造价较高,制作工艺复杂,维修成本高,且多用于大型海上救援活动。
技术实现思路
1、为了解决上述现有技术存在的问题,本公开目的在于提供一种遥控式水上救援器具有承载体,还有设置在承载体上的供电模块、控制模块和驱动模块,以及与控制模块信号连接的远程无线遥控器,承载体呈类环形结构,且内部为中空的腔体;承载体整体呈类马鞍形。承载体呈类马鞍形的结构与双船体结构相似,这种结构具备较好的航行稳定性和耐波性,以及重心位于承载体两侧底部的中心,使得在波浪运动明显的水域中,承载体的受力分散且均匀,具有的浮力稳定,发生侧翻和后翻的概率较低;在需要转向时,可通过承载体上设有驱动模块使承载体绕其重心做自转运行实现转向,这种转向方式灵活性高,以使得变向运动灵活顺畅。
2、本公开所述的一种遥控式水上救援器,包括承载体、以及设置在承载体上的供电模块、控制模块、驱动模块和遥控模块,所述供电模块分别与所述控制模块、所述驱动模块和所述遥控模块电连接,所述控制模块分别与所述驱动模块、所述遥控模块信号连接,所述承载体呈类环形结构,且内部为中空的腔体,所述承载体具有在水平面上相垂直的第一方向和第二方向,所述承载体在所述第一方向上呈自中部向两端逐渐向上翘起的结构,所述承载体在所述第二方向上呈自两侧向中部逐渐向上拱起的结构,使得所述承载体整体呈类马鞍形。
3、优选地,所述承载体在第一方向上具有第一中点,在第二方向上具有第二中点,所述承载体在第一方向上的两端分别与所述第一中点所做连线的夹角为110°~130°,所述承载体在第二方向上的两端分别与所述第二中点所做连线的夹角为110°~130°。
4、优选地,所述遥控式水上救援器还包括连接柱,所述承载体具有与所述第一方向或所述第二方向同向的轴线,所述承载体为分体式结构,包括沿所述轴线互为对称的第一腔体和第二腔体,所述连接柱分别与所述第一腔体和所述第二腔体相连接。
5、优选地,所述第一腔体和所述第二腔体的内部均采用高分子材料填充。
6、优选地,所述第一腔体和所述第二腔体的中部均具有开口向上的安置槽,所述供电模块和所述控制模块均放置于所述安置槽内。
7、优选地,所述驱动模块包括电机、驱动轴和螺旋桨,所述电机放置于所述安置槽内,所述驱动轴一端连接所述螺旋桨,另一端穿设于所述承载体内,并且贯穿至所述安置槽内与所述电机的输出端连接;
8、所述第一腔体和所述第二腔体的外侧均设有所述螺旋桨,并且所述螺旋桨与所述驱动轴位于同一轴线。
9、优选地,所述遥控式水上救援器还包括:
10、螺旋桨保护罩,所述螺旋桨保护罩的一端呈斜圆柱形,另一端呈圆柱形,内部为中空的结构,所述螺旋桨保护罩套设于所述螺旋桨的外部,并且所述桨叶保护罩呈斜圆柱形的一端与所述承载体的下表面相连接。
11、优选地,所述承载体的两侧分别具有向外延伸的把手,用于手部支撑;
12、所述第一腔体和所述第二腔体在靠近所述螺旋桨一端的连接处设有警示灯。
13、优选地,所述第一腔体和所述第二腔体在远离所述警示灯的一端连接处设有摄像头,所述摄像头与所述警示灯位于同一轴线。
14、优选地,所述第一腔体和所述第二腔体在远离所述警示灯的一端连接处设有探照灯,所述探照灯与所述警示灯位于同一轴线,用于照明。
15、本公开所述的一种遥控式水上救援器,其优点在于:
16、1、本公开的一种遥控式水上救援器具有承载体、以及设置在承载体上的供电模块、控制模块、驱动模块和遥控模块,供电模块分别与控制模块、驱动模块和遥控模块电连接,控制模块分别与驱动模块、遥控模块信号连接,承载体呈类环形结构,且内部为中空的腔体,承载体具有在水平面上相垂直的第一方向和第二方向,承载体在所述第一方向上呈自中部向两端逐渐向上翘起的结构,承载体在所述第二方向上呈自两侧向中部逐渐向上拱起的结构,使得承载体整体呈类马鞍形。承载体呈类马鞍形的结构与双船体结构相似,这种结构具备较好的航行稳定性和耐波性,以及重心位于承载体两侧底部的中心,使得在波浪运动明显的水域中,承载体的受力分散且均匀,具有的浮力稳定,发生侧翻和后翻的概率较低;在需要转向时,可通过承载体上设有的驱动模块使承载体绕其重心做自转运行实现转向,这种转向方式灵活性高,以使得变向运动灵活顺畅。
17、2、本公开的一种遥控式水上救援器具有的第一腔体和第二腔体均通过防洪专用救生圈改装而成,将救生圈切割成两半,切割的两半分别为第一腔体和第二腔体,然后将切割的两半重新拼接,拼接成承载体,使得拼接的承载体呈类马鞍形,与双船体结构相似,这种结构在应用和受力上更优于传统的救生圈,具有结构稳定的特点。上述通过防洪专用救生圈改装形成的承载体使其生产制作只需在原有救生圈生产链上增加少量后生产环节,而不用另外开辟新的生产线,在一定程度上减少了生产要素的投入以及减低生产的风险;并且第一腔体和第二腔体的内部均采用高分子材料填充,能提供浮力和结构支撑,第一腔体和第二腔体均为独立的腔体,可单独使用,若任一腔体的驱动模块故障可利用另一腔体的驱动模块完成航行救援,使得遥控式水上救援器具有生命力强的特点;以及结合承载体的结构,可在承载体上设置摄像头,用于搜救落水者,或者设置探照灯,用于光线较暗时候的搜救,因此,遥控式水上救援器还具有延展性高的特点。
技术特征:1.一种遥控式水上救援器,包括承载体(10)、以及设置在承载体(10)上的供电模块(20)、控制模块、驱动模块和遥控模块,所述供电模块(20)分别与所述控制模块、所述驱动模块和所述遥控模块电连接,所述控制模块分别与所述驱动模块、所述遥控模块信号连接,其特征在于,所述承载体(10)呈类环形结构,且内部为中空的腔体,所述承载体(10)具有在水平面上相垂直的第一方向和第二方向,所述承载体(10)在所述第一方向上呈自中部向两端逐渐向上翘起的结构,所述承载体(10)在所述第二方向上呈自两侧向中部逐渐向上拱起的结构,使得所述承载体(10)整体呈类马鞍形。
2.根据权利要求1所述遥控式水上救援器,其特征在于,所述承载体(10)在第一方向上具有第一中点,在第二方向上具有第二中点,所述承载体(10)在第一方向上的两端分别与所述第一中点所做连线的夹角为110°~130°,所述承载体(10)在第二方向上的两端分别与所述第二中点所做连线的夹角为110°~130°。
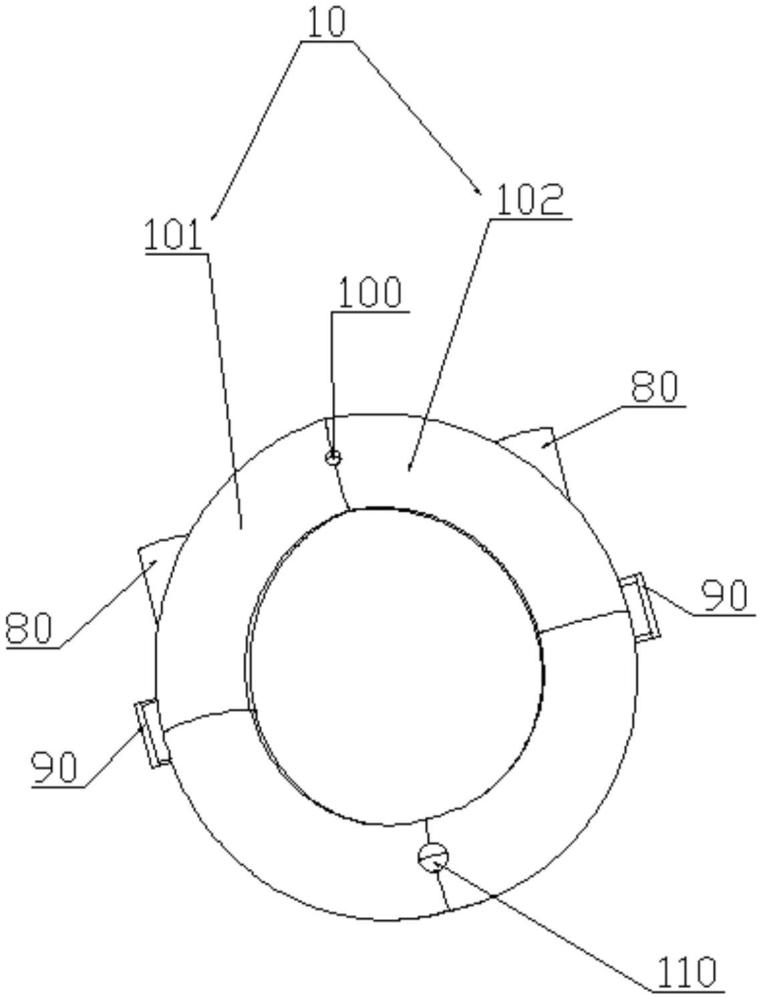
3.根据权利要求1所述遥控式水上救援器,其特征在于,还包括连接柱,所述承载体(10)具有与所述第一方向或所述第二方向同向的轴线,所述承载体(10)为分体式结构,包括沿所述轴线互为对称的第一腔体(101)和第二腔体(102),所述连接柱分别与所述第一腔体(101)和所述第二腔体(102)相连接。
4.根据权利要求3所述遥控式水上救援器,其特征在于,所述第一腔体(101)和所述第二腔体(102)的内部均采用高分子材料填充。
5.根据权利要求4所述遥控式水上救援器,其特征在于,所述第一腔体(101)和所述第二腔体(102)的中部均具有开口向上的安置槽(30),所述供电模块(20)和所述控制模块均放置于所述安置槽(30)内。
6.根据权利要求5所述遥控式水上救援器,其特征在于,所述驱动模块包括电机(40)、驱动轴(50)和螺旋桨(60),所述电机(40)放置于所述安置槽(30)内,所述驱动轴(50)一端连接所述螺旋桨(60),另一端穿设于所述承载体(10)内,并且贯穿至所述安置槽(30)内与所述电机(40)的输出端连接;
7.根据权利要求6所述遥控式水上救援器,其特征在于,还包括:
8.根据权利要求7所述遥控式水上救援器,其特征在于,所述承载体(10)的两侧分别具有向外延伸的把手(90),用于手部支撑;
9.根据权利要求8所述遥控式水上救援器,其特征在于,所述第一腔体(101)和所述第二腔体(102)在远离所述警示灯(100)的一端连接处设有摄像头(110),所述摄像头(110)与所述警示灯(100)位于同一轴线。
10.根据权利要求8所述遥控式水上救援器,其特征在于,所述第一腔体(101)和所述第二腔体(102)在远离所述警示灯(100)的一端连接处设有探照灯(120),所述探照灯(120)与所述警示灯(100)位于同一轴线,用于照明。
技术总结本公开涉及一种遥控式水上救援器,包括承载体、以及设置在承载体上的供电模块、控制模块、驱动模块和遥控模块,所述承载体呈类环形结构,且内部为中空的腔体,所述承载体具有在水平面上相垂直的第一方向和第二方向,所述承载体在所述第一方向上呈自中部向两端逐渐向上翘起的结构,所述承载体在所述第二方向上呈自两侧向中部逐渐向上拱起的结构,使得所述承载体整体呈类马鞍形。本公开的承载体呈类马鞍形的结构,这种结构与双船体结构相似,具备较好的航行稳定性和耐波性,以及重心位于承载体两侧底部的中心,受力分散且均匀,具有的浮力稳定,发生侧翻和后翻的概率较低;并且可通过承载体上的驱动模块使承载体绕其重心做自转运行实现灵活的转向。技术研发人员:林胜亮,李芳,陈照,卜亚满,章翔受保护的技术使用者:广州航海学院技术研发日:20231027技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240722/227445.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表