用于浮动风力涡轮机的动态缆的牵引的制作方法
- 国知局
- 2024-08-01 07:24:19
背景技术:
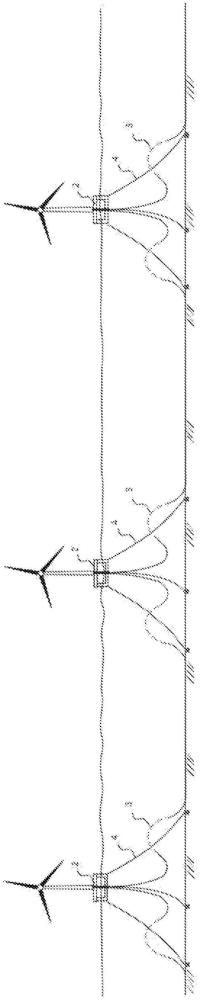
1、如图1所示的浮动风力涡轮机场内布置的fwt、或单个的fwt通常连接到水下电力缆,以将风力涡轮机收集的电能输送到目的地,该目的地可以例如在陆上、在海上或用于出口。水下出口缆可连接到海上转换器或变电站(oss),并进一步连接到电网。浮动风力涡轮机场内的风力涡轮机可以通过阵列间电力缆连接在一起。为了出口所收集的电能,阵列间缆可以成串连接到海上换流站或海上变电站。海上变电站通常用于将电压从现场配电电压升压至更高的电压。对于远离电网连接点的项目,电能可能会从交流转换为直流。
2、阵列间电力缆的容量通常为36kv或66kv。高容量缆或出口缆可能高达220kv。风力涡轮机的阵列间动态电力缆通常在过渡接头中连接到水下电力缆。对于较大的风力涡轮机场,涡轮机可能被连接到通向转换器/变电站的若干“串”,然后电力才会继续在出口缆中传输。阵列间缆在缆的动态部分中可以包括特定的横截面,其中过渡接头抵靠着缆的静态部分中的减小的横截面。在动态缆安装方面,静态部分可以预先安装并连接到动态部分。可替代地,在涡轮机a和涡轮机b之间的整个阵列间缆长度中可能只有一个动态地尺寸设计的横截面,但这在制造和安装方面带来了成本问题。
3、fwt需要动态、高容量的海底缆系统来收集和输出所产生的电力。fwt通常系泊在海床上,以使其保持于或多或少稳定的位置。与底部固定式风力涡轮机(例如站立在海床上固定位置的单桩风力涡轮机)相反,fwt是浮动的,因此会受到风、水流和波浪等外力的影响,从而产生运动。在缆的安装过程中,不仅安装船只可以移动,fwt也可能相对于安装船只移动。因此,与站立在海床上的固定安装式wt相比,fwt的安装程序在需要解决的技术和安全问题方面通常更具挑战性。波浪和水流以及fwt运动和偏移会使阵列间动态电力缆承受巨大的动态应力。因此,这些阵列间动态缆必须适应来自海洋的与浮动风力涡轮机相关的所有移动和负载,以及动态缆自身的重量。阵列间动态缆对电压和弯曲敏感,在fwt上安装阵列间动态缆时发生损坏的可能性很高。将阵列间动态缆安装并连接到浮动风力涡轮机的操作可能很复杂且耗时。安装过程与底部固定式风力涡轮机的安装过程相比通常更为复杂和敏感,因为fwt会受到外力的影响,并且会对波浪、风、水流等外力产生反应。当今的动态缆安装的解决方案需要在缆安装船只上有人,并且还需要浮动风力涡轮机上的人员进行绞盘控制。为了将阵列间动态缆安装到浮动风力涡轮机上,可以在浮动风力涡轮机(fwt)上预先安装用于牵引阵列间动态缆的牵引绞盘以及其他必要的基础设施和仪器。牵引绞盘可以是留在浮动风力涡轮机上的永久系统,也可以是使用后拆除的临时系统。可以使用带有运动补偿舷梯的支援船只为牵引船员提供进入fwt的通道。牵引绞盘系统如果临时安装在fwt上,则可以使用配备3d起重机的船只来吊起/放下牵引绞盘系统。运动补偿舷梯和3d起重机可以在更高的天气条件下运行(波浪更高、风力更大等),还可以提供阵列间动态缆到浮动风力涡轮机上的更安全安装。
4、对于从示范和试点项目走向大规模开发的浮动风力涡轮机,行业需要开发新的和改进的方法来将阵列间动态缆安装和连接到浮动风力涡轮机。
技术实现思路
1、本发明提供了一种用于从船只将动态缆远程缆牵引到浮动风力涡轮机的系统。
2、该系统包括:
3、-浮动风力涡轮机,其包括:
4、-牵引索,其能够附接到将被连接到浮动风力涡轮机的动态缆;
5、-船只,用于执行将动态缆连接到浮动风力涡轮机的动态缆牵引操作,其中,所述牵引索能够附接到动态缆,所述船只被适于将所述牵引索和所附接的动态缆拉到浮动风力涡轮机,并且
6、-其中,所述系统被适于在牵引操作期间补偿船只和浮动风力涡轮机之间的相对移动。
7、所述系统可以被适于补偿牵引索相对于浮动风力涡轮机的移动,所述移动可能是由于船只和/或浮动风力涡轮机的竖直和/或横向运动导致的船只和浮动风力涡轮机之间的距离变化所致。该移动可以是轴向移动。
8、所述系统可以还包括用于测量浮动风力涡轮机和船只之间的距离的第一传感器。第一传感器可以是距离传感器,优选为光学传感器。船只和浮动风力涡轮机之间的相对移动可以通过使用来自至少两个传感器的数据间接地估计,其中,至少一个传感器布置在所述船只上,至少一个第二传感器布置在浮动风力平台上。该至少两个传感器可以是绝对位置传感器。
9、所述船只可以设有动态定位系统,其被适于基于至少一个第一输入参数来控制船只。动态定位系统通过使用船只自身的螺旋桨/推进器来控制船只的位置和船首向。绞盘控制系统可以被适于基于至少一个第二输入参数来控制船只上的绞盘。绞盘控制系统可以设置于船只上。
10、所述至少一个第一输入参数可以包括下述中的至少一个:
11、-浮动风力涡轮机的位置;
12、-船只的位置;
13、-浮动风力涡轮机的运动,包括垂荡、横荡、纵荡、横摇、纵摇和艄摇中的至少一种;
14、-船只的运动,包括垂荡、横荡、纵荡、横摇、纵摇和艄摇中的至少一种;
15、-牵引索和动态缆的位置;以及
16、-动态缆中的拉力;
17、-牵引索中的拉力;
18、-牵引索相对于fwt的位置;
19、-牵引索相对于fwt的移动;
20、-动态缆相对于fwt的位置;
21、-动态缆相对于fwt的移动;
22、-来自绞盘控制系统的输出。
23、所述至少一个第二输入参数可以包括下述中的至少一个:
24、-浮动风力涡轮机的位置;
25、-船只的位置;
26、-浮动风力涡轮机的运动,包括垂荡、横荡、纵荡、横摇、纵摇和艄摇中的至少一种;
27、-船只的运动,包括垂荡、横荡、纵荡、横摇、纵摇和艄摇中的至少一种;
28、-牵引索和动态缆的位置;以及
29、-动态缆中的拉力;
30、-牵引索中的拉力;
31、-牵引索相对于fwt的位置;
32、-牵引索相对于fwt的移动;
33、-动态缆相对于fwt的位置;
34、-动态缆相对于fwt的移动;
35、-来自dp系统的输出。
36、在牵引操作期间补偿船只和浮动风力涡轮机之间的相对移动可以由绞盘或由绞盘和动态定位系统执行。
37、所述系统可以还包括至少一个惯性导航系统(ins)。所述系统可以还包括卫星导航系统或惯性测量单元中的至少一个。所述惯性测量单元可以是运动参考单元(mru)和运动陀螺罗盘(mgc)中的至少一个。
38、可以设置用于监控浮动风力涡轮机上的用于动态缆的悬挂区域的至少一个第二传感器。该第二传感器可以优选是光学传感器。所述系统可以还包括被适于将来自浮动风力平台的至少一个传感器信号传送到船只的第一通信系统;和用于接收所述至少一个传感器信号的船只上的第二通信系统。所述第一通信系统和所述第二通信系统可以是marinbroadband radio(mbr)。
39、提供了一种用于从船只将动态缆远程缆牵引到浮动风力涡轮机的系统。所述系统包括浮动风力涡轮机,浮动风力涡轮机包括牵引索,牵引索能够附接到将被连接到浮动风力涡轮机的动态缆。所述系统还包括船只,船只包括绞盘,用于执行动态缆牵引操作,以将动态缆连接到浮动风力涡轮机。所述牵引索能够附接到动态缆。所述船只被适于通过由绞盘控制系统控制的绞盘将所述牵引索和所附接的动态缆拉到浮动风力涡轮机。该用于远程缆牵引的系统被适于通过绞盘和绞盘控制系统在牵引操作期间补偿船只和浮动风力涡轮机之间的相对移动,绞盘和绞盘控制系统被适于补偿和控制牵引索的移动,该牵引索的移动是由于在牵引操作期间船只和浮动风力涡轮机之间的相对移动导致的。
40、绞盘控制系统基于船只和浮动风力涡轮机之间的相对位置、浮动风力涡轮机相对于船只的速度、以及浮动风力涡轮机和船只之间的定向中的至少一个来控制绞盘。浮动风力涡轮机上设置的仪器系统确定船只和浮动风力涡轮机之间的相对位置、速度和定向,并向船只上的绞盘控制系统提供输出数据。
41、该系统还可包括被适于补偿绞盘拉力的动态定位系统。绞盘拉力由外力提供。动态定位系统还可被适用于补偿环境力,例如风、浪和水流。
42、本发明提供了一种浮动风力涡轮机,包括:牵引索,其能够附接至将被连接到浮动风力涡轮机的动态缆;以及,其中,所述牵引索能够附接到用于执行动态缆到浮动风力涡轮机的牵引操作的船只,并且其中,所述船只被适于在牵引操作期间补偿浮动风力涡轮机和船只之间的相对移动。该缆可被补偿以允许船只和浮动风力涡轮机之间的相对移动。
43、所述船只可以被适于补偿牵引索相对于浮动风力涡轮机的移动,所述移动可能是由于船只和/或浮动风力涡轮机的竖直和/或横向运动造成的船只和浮动风力涡轮机之间的距离变化所致。该移动可以是轴向移动。
44、浮动风力涡轮机可以还设有用于测量浮动风力涡轮机和船只之间的距离的传感器。该传感器可以是距离传感器。浮动风力涡轮机可以还包括至少一个惯性导航系统(ins)。
45、浮动风力涡轮机可以还包括卫星导航系统和惯性测量单元中的至少一个,所述惯性测量单元优选为运动参考单元(mru)或运动陀螺罗盘(mgc)。浮动风力涡轮机可以还设有用于监控动态缆的悬挂区域的至少一个传感器。该用于监控悬挂区域的传感器可以是光学传感器。所述至少一个传感器可以被适于在动态缆处于最终悬挂位置时提供信号。浮动风力涡轮机可以还包括悬挂装置,其被适于悬挂将被牵引和连接到浮动风力涡轮机的动态缆。该悬挂装置可以被适于在无需人工干预的情况下悬挂将被牵引和连接到浮动风力涡轮机的动态缆。该悬挂装置可以被适于进行自动悬挂。该悬挂装置可以是机械悬挂装置。该悬挂装置可以是悬挂夹具装置。该悬挂装置可以包括薄弱链接系统,用于在系泊线故障和大型浮动风力涡轮机漂离的情况下释放缆。浮动风力涡轮机可以还包括通信系统,优选为marin broadband radio(mbr),其被适于将来自浮动风力涡轮机的至少一个信号传送到船只。
46、本发明提供了一种船只,用于执行将动态缆连接到设有牵引索的浮动风力涡轮机的动态缆牵引操作,其中,所述牵引索能够附接到动态缆,船只包括绞盘,所述绞盘被适于拉动所述牵引索以将动态缆牵引到浮动风力涡轮机,其中,所述船只被适于在牵引操作期间补偿浮动风力涡轮机和船只之间的相对移动。该缆可被补偿以允许船只和浮动风力涡轮机之间的相对移动。
47、所述船只可以被适于补偿牵引索相对于浮动风力涡轮机的移动,所述移动可能是由于船只和/或浮动风力涡轮机的竖直和/或横向运动造成的船只和浮动风力涡轮机之间的距离变化所致。
48、该移动可以是轴向移动。该船只可以还包括用于测量浮动风力涡轮机和船只之间的距离的传感器。
49、船只可以还设有动态定位系统,其被适于基于至少一个第一输入参数控制所述船只。绞盘控制系统可以被适于基于至少一个第二输入参数来控制所述绞盘。
50、所述至少一个第一输入参数可以还包括下述中的至少一个:
51、-浮动风力涡轮机的位置;
52、-船只的位置;
53、-浮动风力涡轮机的运动,包括垂荡、横荡、纵荡、横摇、纵摇和艄摇中的至少一种;
54、-船只的运动,包括垂荡、横荡、纵荡、横摇、纵摇和艄摇中的至少一种;
55、-牵引索和动态缆的位置;以及
56、-动态缆中的拉力;
57、-牵引索中的拉力;
58、-牵引索相对于fwt的位置;
59、-牵引索相对于fwt的移动;
60、-动态缆相对于fwt的位置;
61、-动态缆相对于fwt的移动;
62、-来自绞盘控制系统的输出。
63、所述至少一个第二输入参数可以还包括下述中的至少一个:
64、-浮动风力涡轮机的位置;
65、-船只的位置;
66、-浮动风力涡轮机的运动,包括垂荡、横荡、纵荡、横摇、纵摇和艄摇中的至少一种;
67、-船只的运动,包括垂荡、横荡、纵荡、横摇、纵摇和艄摇中的至少一种;
68、-牵引索和动态缆的位置;以及
69、-动态缆中的拉力;
70、-牵引索中的拉力;
71、-牵引索相对于fwt的位置;
72、-牵引索相对于fwt的移动;
73、-动态缆相对于fwt的位置;
74、-动态缆相对于fwt的移动;
75、-来自dp系统的输出。
76、在牵引操作期间补偿船只和浮动风力涡轮机之间的相对移动可以由绞盘或由绞盘和动态定位系统执行。
77、船只可以还设有通信系统,优选为marin broadband radio(mbr),用于接收来自浮动风力涡轮机的至少一个传感器信号。
78、本发明还提供了一种用于根据上述的系统执行动态缆到浮动风力涡轮机的缆牵引的方法。所述方法包括:将动态缆附接至浮动风力涡轮机上的牵引索,通过船只拉动牵引索,直到动态缆被定位于浮动风力涡轮机上的悬挂装置中为止,以及在牵引操作期间补偿浮动风力涡轮机和船只之间的相对移动。该缆可以被补偿以允许船只和浮动风力涡轮机之间的相对移动。通过船只拉动可以由船只上的绞盘执行。
79、所述系统可以被适于补偿牵引索相对于浮动风力涡轮机的移动,所述移动可能是由于船只和/或浮动风力涡轮机的竖直和/或横向运动造成的船只和浮动风力涡轮机之间的距离变化所致。
80、该移动可以是轴向移动。该方法可以还包括测量浮动风力涡轮机和船只之间的距离。该距离可以在浮动风力涡轮机上用于牵引索的出口和船只上用于牵引索的入口之间测量。
81、该方法可以还包括由动态定位系统基于至少一个第一输入参数控制所述船只。该方法可以还包括由绞盘控制系统基于至少一个第二输入参数控制所述绞盘。所述至少一个第一输入参数包括下述中的至少一个:
82、-浮动风力涡轮机的位置;
83、-船只的位置;
84、-浮动风力涡轮机的运动,包括垂荡、横荡、纵荡、横摇、纵摇和艄摇中的至少一种;
85、-船只的运动,包括垂荡、横荡、纵荡、横摇、纵摇和艄摇中的至少一种;
86、-牵引索和动态缆的位置;以及
87、-动态缆中的拉力;
88、-牵引索中的拉力;
89、-牵引索相对于fwt的位置;
90、-牵引索相对于fwt的移动;
91、-动态缆相对于fwt的位置;
92、-动态缆相对于fwt的运动;
93、-来自绞盘控制系统的输出。
94、所述至少一个第二输入参数包括下述中的至少一个:
95、-浮动风力涡轮机的位置;
96、-船只的位置;
97、-浮动风力涡轮机的运动,包括垂荡、横荡、纵荡、横摇、纵摇和艄摇中的至少一种;
98、-船只的运动,包括垂荡、横荡、纵荡、横摇、纵摇和艄摇中的至少一种;
99、-牵引索和动态缆的位置;以及
100、-动态缆中的拉力;
101、-牵引索中的拉力;
102、-牵引索相对于fwt的位置;
103、-牵引索相对于fwt的移动;
104、-动态缆相对于fwt的位置;
105、-动态缆相对于fwt的移动;
106、-来自dp系统的输出。
107、在牵引操作期间补偿船只和浮动风力涡轮机之间的相对移动由绞盘或由绞盘和动态定位系统执行。
108、本概念的构思是在浮动的、因而是移动的装置(例如fwt)上制造一种动态缆牵引系统,该系统可以从船只上进行安装和操作,用于安装或执行阵列间动态缆的牵引。本发明的上下文中的船只是浮动的并且通过动态定位基本上保持静止。然而,船只还可以通过使用不带dp系统的主动绞盘来执行牵引操作,如上所解释的。消除了在每个fwt上安装牵引绞盘的需要并减少了在施工阶段人员和设备往返于fwt的转移的需要,解决了行业挑战。对于规模风力(电)场,特别是大型风力场,本发明的系统及其概述的方法将:
109、1.降低整体阵列间动态缆安装成本。
110、2.在缆牵引和悬挂期间避免人员和重型设备往返于fwt的转移,从而提高了安全性。
111、3.通过减少对支援船只和人员协调的需求提高了海上调度的灵活性。
112、4.通过对fwt和船只进行简单改造,减少了未来进行缆的断开/连接的进场(mobilization,调用)时间。
113、根据本发明的远程动态缆牵引系统解决了动态缆安装和连接操作的行业挑战。与当前的解决方案相比,本新的解决方案提供了更标准化的操作,安装速度更快,减少了对漂浮物上的设备和人员的需求,并减少了操作中对rov的需求。
114、本新的解决方案提高了操作的安全性,为同步dp系统和绞盘控制系统提供了可能性。dp控制系统还可以配备用于改进牵引操作期间的操作概述的系统。dp控制系统可与绞盘控制系统集成,实现半自动故障处理。船只上的绞盘控制系统和dp控制系统之间的集成可以使这些系统相互监控。这提高了操作员的意识和能力,在船只dp或绞盘出现故障时自动触发补偿动作,从而提高了操作安全性并防止电力缆损坏。为了提高安全性,dp系统和绞盘控制系统可以共同位于船桥上。
115、具有特定增强任务执行功能的dp系统控制船只的位置和船首向。dp系统可具有用于动态位置操作员的接口。该dp系统还向绞盘控制系统提供放出/收入指令、来自动态位置(dp)/动态位置操作员(dpo)系统的设定点、以及dp/dpo系统的系统状态。绞盘控制系统可向dp/dpo系统提供索长度、索拉力、以及绞盘控制系统的系统状态等数据。绞盘控制系统还可设有本地人机界面(hmi)。绞盘控制系统可以从绞盘接收速度和设定点。绞盘控制系统基于所收到的来自dp/dpo系统、本地hmi和绞盘的指令和数据对绞盘进行控制。
116、本新式远程动态缆牵引解决方案的优势包括:
117、·与已知解决方案相比,动态缆牵引和悬挂操作可以在更高的海况下更快地完成,且不影响安全性。
118、·fwt上所需的预调用(pre-mobilized)设备大大减少,并且fwt上不再需要牵引绞盘。
119、·由于动态缆牵引和动态缆的临时悬挂可以从缆安装/牵引船只远程执行,无需fwt上的人员,因此对用于支持该操作的辅助船只的需求显著减少。
120、·通过使用预先安装的可在水面拾起的悬吊索,减少了对rov的需求。
121、基准研究表明,实施本发明的dp远程动态缆牵引解决方案显著降低了成本。
122、·提高了可操作性和生产力,同时不损害操作安全性。
123、·集成的dp和绞盘控制,实现自动化的、一致的船只和绞盘操作,减少人为干预。
本文地址:https://www.jishuxx.com/zhuanli/20240722/227440.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表