一种巡检机器人
- 国知局
- 2024-08-01 07:35:33
本技术涉及巡检机器人,尤其涉及一种巡检机器人。
背景技术:
1、目前实际应用中,机器人行驶速度较慢致使整体巡检时间较长,需提高自主巡检时车体的行走速度。机器人行进需保障过程中导航精确、停车平稳。现有的变电站巡检机器人大多采用单一的导航方式,这些导航方法都存在精度低、稳定性差等问题,致使导航存在偏差,造成机器人速度减缓,工作效率低下。
2、uwb通过在较宽的频谱上传送极低功率的信号,能在10米左右的范围内实现数百mbit/s至数gbit/s的数据传输速率。uwb具有抗干扰性能强、传输速率高、带宽极宽、消耗电能小、发送功率小等诸多优势,主要应用于室内通信、高速无线lan、家庭网络、无绳电话、安全检测、位置测定、雷达等领域。
3、激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达系统,与普通微波雷达相比,激光雷达由于使用的是激光束,工作频率较微波高了许多,因此带来了很多特点,主要有:分辨率高、隐蔽性好、抗有源干扰能力强、低空探测性能好、体积小、质量轻,激光雷达的作用是能精确测量目标位置(距离和角度)、运动状态(速度、振动和姿态)和形状,能探测、识别、分辨和跟踪目标,可用于导航领域。
4、因此,有必要提供一种巡检机器人,基于uwb与激光雷达slam融合导航的巡检机器人,提升定位与导航的精度,解决机器人因定位精度低而行进速度慢,导致的效率不高的问题。
技术实现思路
1、本实用新型公开了一种巡检机器人,其可以有效解决背景技术中涉及的技术问题。
2、为实现上述目的,本实用新型的技术方案为:
3、一种巡检机器人,包括底架以及安装于所述底架上的电池组件、uwb定位组件、激光雷达组件、无线通讯组件、控制系统和两个天线,所述底架的四周各安装有一个麦克拉姆车轮,所述底架上还固定有四个车轮电机和电机控制器,所述麦克拉姆车轮与所述车轮电机一一对应连接,所述电机控制器与四个所述车轮电机连接,所述电池组件用于供电,所述电机控制器、所述uwb定位组件、所述激光雷达组件和所述无线通讯组件与所述控制系统连接,一个所述天线与所述uwb定位组件连接,另一个所述天线与所述无线通讯组件连接。
4、一种基于uwb与激光雷达slam融合导航的巡检机器人,基于麦克拉姆车轮技术进行巡检机器人的移动,巡检过程更稳定,且能适应更复杂的地形。安装有uwb定位组件和激光雷达组件,二者混合使用对巡检车的位置定位以及行走路径进行规划,可以提高定位精度和行走速率。采用a*路径规划实现巡检机器人的导航功能,导航过程中在主控中可通过uwb定位与激光雷达slam结合对每个slam激光粒子的位置均值、方差进行校正,得到新的均值和方差,提升定位与导航的精度,解决了机器人因定位精度低而行进速度慢导致的效率不高的问题。
5、作为本实用新型的一种优选改进:所述底架包括底板、与所述底板相对间隔设置的顶板以及连接所述底板和所述顶板的侧板,所述底板、所述侧板和所述顶板之间形成有内部腔体,所述车轮电机和所述电池组件位于内部腔体中,所述麦克拉姆车轮安装于所述底板上,所述侧板和所述顶板之间为可拆卸连接。
6、作为本实用新型的一种优选改进:所述激光雷达组件位于所述底架顶面的前侧,所述电机控制器和所述uwb定位组件通过第一固定件安装于所述底架顶面的后侧,所述底架顶面的后侧上固定有隔板,所述控制系统通过第二固定件安装于所述隔板上,所述天线安装于所述隔板上。
7、作为本实用新型的一种优选改进:所述第一固定件和所述第二固定件为m3铜柱。
8、作为本实用新型的一种优选改进:所述底架上设有充电口,所述电池组件与所述充电口连接。
9、作为本实用新型的一种优选改进:所述车轮电机为mg513金属齿轮减速电机,所述电机控制器采用wheeltec的c30d底层主控stm32f407vet6芯片。
10、作为本实用新型的一种优选改进:所述uwb定位组件为浩如科技ulw1定位装置系列,所述激光雷达组件为wheeltec的激光雷达n10p。
11、作为本实用新型的一种优选改进:所述无线通讯组件采用英伟达jeston nano无线网卡,所述控制系统采用英伟达jeston nano。
12、作为本实用新型的一种优选改进:所述天线为外置sam内螺内针折叠胶棒2.4g天线。
13、本实用新型的有益效果如下:
14、通过uwb定位组件和激光雷达组件配合进行定位导航,采用a*路径规划实现巡检机器人的导航功能,导航过程中在主控中可通过uwb定位与激光雷达slam结合对每个slam激光粒子的位置均值、方差进行校正,得到新的均值和方差,提升定位与导航的精度,解决了机器人因定位精度低而行进速度慢导致的效率不高的问题。
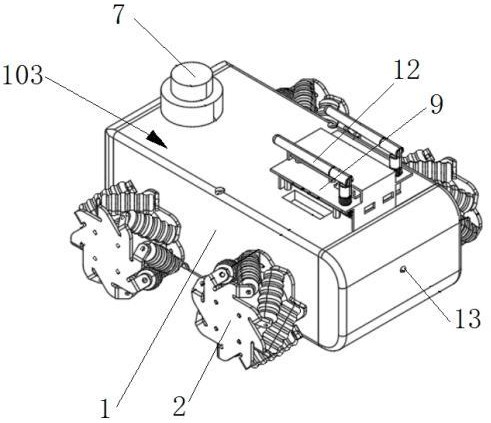
技术特征:1.一种巡检机器人,其特征在于:包括底架(1)以及安装于所述底架(1)上的电池组件(4)、uwb定位组件(6)、激光雷达组件(7)、无线通讯组件、控制系统(11)和两个天线(12),所述底架(1)的四周各安装有一个麦克拉姆车轮(2),所述底架(1)上还固定有四个车轮电机(3)和电机控制器(5),所述麦克拉姆车轮(2)与所述车轮电机(3)一一对应连接,所述电机控制器(5)与四个所述车轮电机(3)连接,所述电池组件(4)用于供电,所述电机控制器(5)、所述uwb定位组件(6)、所述激光雷达组件(7)和所述无线通讯组件与所述控制系统(11)连接,一个所述天线(12)与所述uwb定位组件(6)连接,另一个所述天线(12)与所述无线通讯组件连接。
2.根据权利要求1所述的一种巡检机器人,其特征在于:所述底架(1)包括底板(101)、与所述底板(101)相对间隔设置的顶板(103)以及连接所述底板(101)和所述顶板(103)的侧板(102),所述底板(101)、所述侧板(102)和所述顶板(103)之间形成有内部腔体,所述车轮电机(3)和所述电池组件(4)位于内部腔体中,所述麦克拉姆车轮(2)安装于所述底板(101)上,所述侧板(102)和所述顶板(103)之间为可拆卸连接。
3.根据权利要求1所述的一种巡检机器人,其特征在于:所述激光雷达组件(7)位于所述底架(1)顶面的前侧,所述电机控制器(5)和所述uwb定位组件(6)通过第一固定件(8)安装于所述底架(1)顶面的后侧,所述底架(1)顶面的后侧上固定有隔板(9),所述控制系统(11)通过第二固定件(10)安装于所述隔板(9)上,所述天线(12)安装于所述隔板(9)上。
4.根据权利要求3所述的一种巡检机器人,其特征在于:所述第一固定件(8)和所述第二固定件(10)为m3铜柱。
5.根据权利要求1所述的一种巡检机器人,其特征在于:所述底架(1)上设有充电口(13),所述电池组件(4)与所述充电口(13)连接。
6.根据权利要求1所述的一种巡检机器人,其特征在于:所述车轮电机(3)为mg513金属齿轮减速电机,所述电机控制器(5)采用wheeltec的c30d底层主控stm32f407vet6芯片。
7.根据权利要求1所述的一种巡检机器人,其特征在于:所述uwb定位组件(6)为浩如科技ulw1定位装置系列,所述激光雷达组件(7)为wheeltec的激光雷达n10p。
8.根据权利要求1所述的一种巡检机器人,其特征在于:所述无线通讯组件采用英伟达jeston nano无线网卡,所述控制系统(11)采用英伟达jeston nano。
9.根据权利要求1所述的一种巡检机器人,其特征在于:所述天线(12)为外置sam内螺内针折叠胶棒2.4g天线。
技术总结本技术属于巡检机器人技术领域,公开了一种巡检机器人,包括底架、电池组件、UWB定位组件、激光雷达组件、无线通讯组件、控制系统和两个天线,底架的四周各安装有一个麦克拉姆车轮,底架上还固定有四个车轮电机和电机控制器,所述麦克拉姆车轮与所述车轮电机一一对应连接,所述电机控制器与四个所述车轮电机连接,所述电机控制器、所述UWB定位组件、所述激光雷达组件和所述无线通讯组件与所述控制系统连接,一个天线与UWB定位组件连接,另一个天线与无线通讯组件连接。本技术的有益效果:通过UWB定位与激光雷达SLAM结合提升定位与导航的精度,解决了机器人因定位精度低而行进速度慢导致的效率不高的问题。技术研发人员:吴家欣,曾水玲,胡浩琪,张进林受保护的技术使用者:吉首大学技术研发日:20231110技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/228058.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表