一种搬运机器人的制作方法
- 国知局
- 2024-08-01 08:00:16
本技术涉及机器人,特别是涉及一种搬运机器人。
背景技术:
1、搬运机器人为应用机器人运动轨迹实现代替人工搬运的自动化产品,搬运机器人是可以进行自动化搬运作业的工业机器人。
2、现有搬运机械人的顶部大多都是比较光滑的平台,没有设置防掉落结构,物件放置在搬运机器人上,在运输过程中容易出现掉落的情况,因此本实用新型提出了一种搬运机器人来解决上述问题。
技术实现思路
1、针对上述现有技术存在的缺陷,本实用新型的目的在于提供一种搬运机器人。
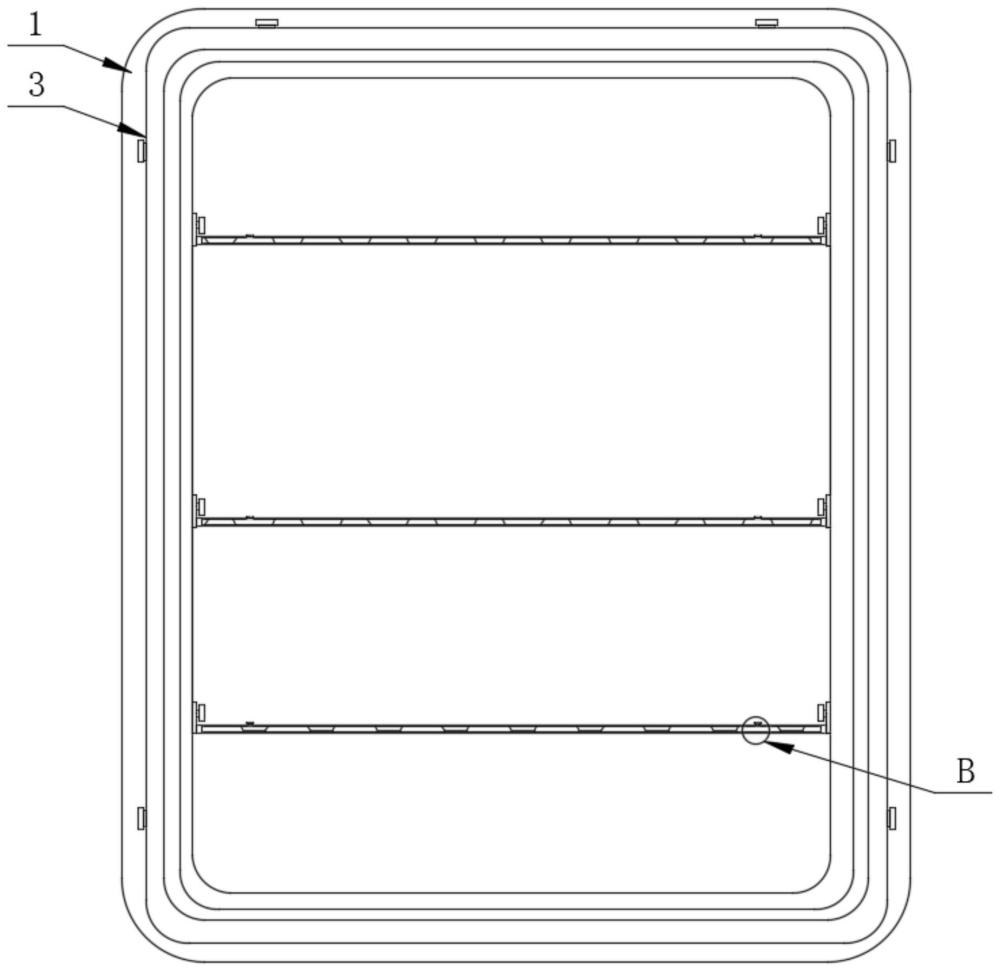
2、为实现上述目的,本实用新型提供了一种搬运机器人,包括机器人壳体,所述机器人壳体顶部固定设置有防护板机构,所述防护板机构包括固定回形板,所述固定回形板固定设置在所述机器人壳体的顶部,所述固定回形板顶部开设有回形插槽,所述回形插槽内活动插设有活动回形板,所述固定回形板的外侧设置有若干个定位机构,所述活动回形板通过所述定位机构与所述固定回形板固定。
3、进一步地,所述定位机构包括定位螺杆,所述定位螺杆与所述固定回形板螺纹配合,所述活动回形板通过旋紧所述定位螺杆抵住固定。
4、进一步地,所述定位螺杆内端转动设置有转轴,所述转轴远离所述定位螺杆的一侧固定设置有橡胶垫。
5、进一步地,所述机器人壳体底部四角分别设置有移动轮,所述机器人壳体内设置有执行机构、驱动机构和控制机构。
6、进一步地,所述固定回形板与所述机器人壳体可拆卸安装固定。
7、进一步地,所述固定回形板内两侧分别横向开设有滑槽,两个所述滑槽内分别滑动设置有若干个滑块,水平对应设置有两个所述滑块间固定设置有隔板,所述滑块的安装位置可固定。
8、进一步地,所述滑块外侧设置有松紧螺杆,所述松紧螺杆与所述滑块螺纹配合,所述滑块通过旋紧所述松紧螺杆抵住固定。
9、进一步地,所述隔板包括固定板,所述固定板两侧分别与滑块固定连接,所述固定板顶部纵向开设有活动槽,所述活动槽内活动插设有活动板,所述固定板上端外侧设置有若干个调节螺杆,所述调节螺杆与所述固定板螺纹配合,所述活动板通过旋紧所述调节螺杆抵住固定。
10、与现有技术相比,本实用新型的有益效果是:
11、1、通过设置的固定回形板、活动回形板、定位螺杆、转轴和橡胶垫等结构,将物件放置在机器人壳体上,根据物件高度的不同,调节活动回形板插入回形插槽内的深度,在橡胶垫的作用下,活动回形板通过旋紧定位螺杆抵住固定,在防护板机构防护的作用下,能够有效防止运输过程中的物件出现掉落的情况,解决了现有搬运机械人的顶部大多都是比较光滑的平台,没有设置防掉落结构,物件放置在搬运机器人上,在运输过程中容易出现掉落情况的问题;
12、2、通过设置的滑块、松紧螺杆、隔板和滑槽等结构,根据物件宽度的不同,调节相邻两个隔板间的距离,滑块通过旋紧松紧螺杆抵住固定,进而对隔板进行固定,隔板将机器人壳体顶部分为若干个区域,便于在机器人壳体的若干个区域内放置不同的物件,防止不同物件在运输过程中出现晃动碰撞,同时也可以根据物件高度的不同,调节活动板插入活动槽内的深度,活动板通过旋紧调节螺杆抵住固定即可。
技术特征:1.一种搬运机器人,其特征在于:包括机器人壳体(1),所述机器人壳体(1)顶部固定设置有防护板机构(3),所述防护板机构(3)包括固定回形板(33),所述固定回形板(33)固定设置在所述机器人壳体(1)的顶部,所述固定回形板(33)顶部开设有回形插槽(4),所述回形插槽(4)内活动插设有活动回形板(31),所述固定回形板(33)的外侧设置有若干个定位机构(32),所述活动回形板(31)通过所述定位机构(32)与所述固定回形板(33)固定。
2.根据权利要求1所述的一种搬运机器人,其特征在于:所述定位机构(32)包括定位螺杆(321),所述定位螺杆(321)与所述固定回形板(33)螺纹配合,所述活动回形板(31)通过旋紧所述定位螺杆(321)抵住固定。
3.根据权利要求2所述的一种搬运机器人,其特征在于:所述定位螺杆(321)内端转动设置有转轴(322),所述转轴(322)远离所述定位螺杆(321)的一侧固定设置有橡胶垫(323)。
4.根据权利要求3所述的一种搬运机器人,其特征在于:所述机器人壳体(1)底部四角分别设置有移动轮(2),所述机器人壳体(1)内设置有执行机构、驱动机构和控制机构。
5.根据权利要求4所述的一种搬运机器人,其特征在于:所述固定回形板(33)与所述机器人壳体(1)可拆卸安装固定。
6.根据权利要求5所述的一种搬运机器人,其特征在于:所述固定回形板(33)内两侧分别横向开设有滑槽(5),两个所述滑槽(5)内分别滑动设置有若干个滑块(6),水平对应设置有两个所述滑块(6)间固定设置有隔板(8),所述滑块(6)的安装位置可固定。
7.根据权利要求6所述的一种搬运机器人,其特征在于:所述滑块(6)外侧设置有松紧螺杆(7),所述松紧螺杆(7)与所述滑块(6)螺纹配合,所述滑块(6)通过旋紧所述松紧螺杆(7)抵住固定。
8.根据权利要求7所述的一种搬运机器人,其特征在于:所述隔板(8)包括固定板(82),所述固定板(82)两侧分别与滑块(6)固定连接,所述固定板(82)顶部纵向开设有活动槽(84),所述活动槽(84)内活动插设有活动板(83),所述固定板(82)上端外侧设置有若干个调节螺杆(81),所述调节螺杆(81)与所述固定板(82)螺纹配合,所述活动板(83)通过旋紧所述调节螺杆(81)抵住固定。
技术总结本技术公开了一种搬运机器人,包括机器人壳体,所述机器人壳体顶部固定设置有防护板机构,所述防护板机构包括固定回形板,所述固定回形板固定设置在所述机器人壳体的顶部,所述固定回形板顶部开设有回形插槽,所述回形插槽内活动插设有活动回形板,所述固定回形板的外侧设置有若干个定位机构,所述活动回形板通过所述定位机构与所述固定回形板固定,所述定位机构包括定位螺杆,所述定位螺杆与所述固定回形板螺纹配合,所述活动回形板通过旋紧所述定位螺杆抵住固定,本技术解决了现有搬运机械人的顶部大多都是比较光滑的平台,没有设置防掉落结构,物件放置在搬运机器人上,在运输过程中容易出现掉落情况的问题。技术研发人员:唐小燕受保护的技术使用者:唐红博技术研发日:20231124技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240722/229896.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表