一种六足机器人、行走控制系统及控制方法与流程
- 国知局
- 2024-08-01 08:15:02
本发明属于多足机器人行走领域,具体涉及一种六足机器人。
背景技术:
1、“仿生机器人”是指模仿生物、从事生物特点工作的机器人,发展仿生机器人能够弥补特种作业下的劳动力的严重不足,六足机器人是目前常见的一种仿生机器人,其运动时只需要离散的点接触地面,对环境的破坏程度也较小,对崎岖地形的适应性强。
2、目前六足机器人,主要有电机驱动、液压驱动和混合驱动三种方式。电机驱动方式的每只腿运动关节均采用电机作为驱动源,但是电机抗负载冲击和持续工作散热能力弱;液压驱动方式采用液压执行器驱动各关节,大重量的执行器安装在腿部后会增加腿部惯量,适用于机器人低速行走;混合驱动方式采用电机和液压方式分别驱动对应的运动关节,但是增加了软、硬件系统的复杂度,以及整体的控制难度。
3、大部分六足机器人采用了仿昆虫的结构,因此模仿“六足纲”昆虫步行的三角步态,便是六足步行机器人实现步行的典型步态,还可以采用如涟漪步态、波动步态、自由步态等,可以适应不同的环境和任务需求,但是,在面对野外崎岖路段时,六足机器人应应对这种特殊场景,因此,人们需对这些步态进行设计,使六足机器人能够以多种步态行进。
技术实现思路
1、本发明的目的是设计重型六足机器人的行走控制方法,实现不同步态复杂路段的行走条件下的较佳稳定性;
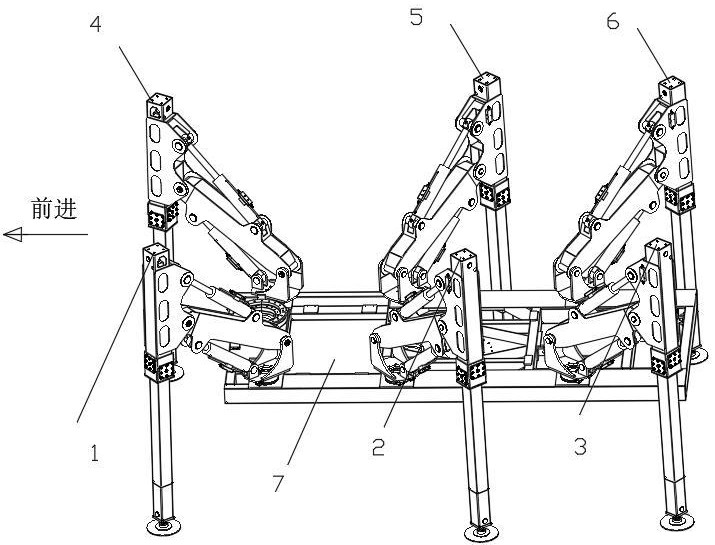
2、为达到上述技术目的,本发明提供如下技术方案:一种六足机器人,包括机身和支撑腿,所述支撑腿通过回转连接底座转动连接于所述机身上,所述支撑腿包括大腿和小腿,所述大腿一端转动连接于所述回转连接底座上,另一端转动连接于所述小腿中部,还包括第一液压缸和第二液压缸,所述第一液压缸一端连接于所述回转连接底座上,另一端连接于所述大腿下部,所述第一液压缸与所述大腿和所述回转连接底座始终围成三角形,控制所述第一液压缸可控制所述大腿摆动,所述第二液压缸一端连接于所述大腿上部,另一端连接于所述小腿的顶部,所述第二液压缸与所述大腿和所述小腿亦可围成三角形,控制所述第二液压缸可控制所述小腿摆动。
3、进一步的,所述支撑腿为六条,六条所述支撑腿为两组,两组所述支撑腿分布于所述机器人两侧。
4、一种六足机器人行走控制系统,应用于上述的六足机器人,具体包括存储模块、感知模块、控制模块和执行模块,所述存储模块用于存储步态信息及环境类型,所述感知模块用于采集环境信息并实施传递给所述控制模块,所述控制模块用于处理采集到的所述环境信息,并与所述环境类型匹配,按照所述环境类型匹配的种类调用所述步态信息,并控制所述执行机构运行与所述环境类型匹配的步态。
5、进一步的,所述环境信息包括平坦地形、崎岖地形和陡坡地形,所述步态信息包括三角步态、涟漪步态和前推后扒步态,所述平坦地形对应所述三角步态、所述崎岖地形对应所述涟漪步态、所述陡坡地形对应所述前推后扒步态。
6、进一步的,所述三角步态包括两组协同足,第一足协同足包括左前足、左后足和右中足,第二协同足为右前足、右后足和左中足。
7、进一步的,所述涟漪步态包括三组协同足,第一协同足包括左前足、右前足,第二协同足包括左中足和右中足,第三协同足包括左后足、右后足。
8、进一步的,所述前推后扒步态包括四组协同足,其中一组所述协同足包括同一侧的两足和另一侧的一足,其余三足各自成一组。
9、进一步的,同一侧的两足与另一侧的一足互补设置。
10、一种六足机器人行走控制方法,包括六足机器人行走控制系统和如下步骤:
11、s1:定义步态信息及环境类型并存储于所述存储模块内;
12、s2:获取目标位置,规划行进路线;
13、s3:通过所述感知模块实时获取周边环境信息并与所述环境类型比对;
14、s4:通过所述控制模块判断所述环境类型并根据所述环境类型调取步态信息;
15、s5:通过所述控制模判断所述环境类型是否变换;
16、s6:控制执行模块执行;
17、s7:重复s3的步骤直至到达目标位置。
18、进一步的,s5中,若是则立即停止当前步态,调整为与所述环境类型相适应的步态,若否则保持当前步态运行。
19、与现有技术相比,本发明的有益效果是:通过控制机器人的各个支撑腿,能让机器人做出各种行走步态,从而提高机器人的行走效率;
20、此外,通过设置的三角步态设计可使得机器人在平缓路段具有较高的行进速度,而涟漪步态设计可使得机器人在较为崎岖的山地地形中以中低速运行,同一时间内保证有至少四条支撑腿支撑,因此提高了机器人的稳定性,前扒后推步态在较为陡峭的斜坡路况,提高了机器人在此地形下的稳定性和适应性,进而提高通行效率;
21、此外,通过预先存储相关的步态在存储模块上,通过与真实世界比对进而调取目标步态,可节约控制算力,降低运行能耗,提高响应效率。
技术特征:1.一种六足机器人,包括机身和支撑腿,其特征在于:所述支撑腿通过回转连接底座转动连接于所述机身上,所述支撑腿包括大腿和小腿,所述大腿一端转动连接于所述回转连接底座上,另一端转动连接于所述小腿中部,还包括第一液压缸和第二液压缸,所述第一液压缸一端连接于所述回转连接底座上,另一端连接于所述大腿下部,所述第一液压缸与所述大腿和所述回转连接底座始终围成三角形,控制所述第一液压缸可控制所述大腿摆动,所述第二液压缸一端连接于所述大腿上部,另一端连接于所述小腿的顶部,所述第二液压缸与所述大腿和所述小腿亦可围成三角形,控制所述第二液压缸可控制所述小腿摆动。
2.根据权利要求1所述的一种六足机器人,其特征在于:所述支撑腿为六条,六条所述支撑腿为两组,两组所述支撑腿分布于所述机器人两侧。
3.一种六足机器人行走控制系统,应用于如权利要求1至2任一项所述的六足机器人,其特征在于:包括存储模块、感知模块、控制模块和执行模块,所述存储模块用于存储步态信息及环境类型,所述感知模块用于采集环境信息并实时传递给所述控制模块,所述控制模块用于处理采集到的所述环境信息,并与所述环境类型匹配,按照所述环境类型匹配的种类调用所述步态信息,并控制所述执行模块运行与所述环境类型匹配的步态。
4.根据权利要求3所述的一种六足机器人行走控制系统,其特征在于:所述环境信息包括平坦地形、崎岖地形和陡坡地形,所述步态信息包括三角步态、涟漪步态和前推后扒步态,所述平坦地形对应所述三角步态、所述崎岖地形对应所述涟漪步态、所述陡坡地形对应所述前推后扒步态。
5.根据权利要求4所述的一种六足机器人行走控制系统,其特征在于:所述三角步态包括两组协同足,第一足协同足包括左前足、左后足和右中足,第二协同足为右前足、右后足和左中足。
6.根据权利要求4所述的一种六足机器人行走控制系统,其特征在于:所述涟漪步态包括三组协同足,第一协同足包括左前足、右前足,第二协同足包括左中足和右中足,第三协同足包括左后足、右后足。
7.根据权利要求4所述的一种六足机器人行走控制系统,其特征在于:所述前推后扒步态包括四组协同足,其中一组所述协同足包括同一侧的两足和另一侧的一足,其余三足各自成一组。
8.根据权利要求7所述的一种六足机器人行走控制系统,其特征在于:同一侧的两足与另一侧的一足互补设置。
9.一种六足机器人行走控制方法,其特征在于:应用于如权利要求3-8任一项所述的六足机器人行走控制系统,包括如下步骤:
10.根据权利要求9所述的一种六足机器人行走控制方法,其特征在于:s5中,若是则立即停止当前步态,调整为与所述环境类型相适应的步态,若否则保持当前步态运行。
技术总结本发明涉及一种六足机器人、行走控制系统及控制方法,包括机身和支撑腿,通过控制机器人的各个支撑腿,能让机器人做出各种行走步态,从而提高机器人的行走效率,此外通过机器人的行走控制系统,控制机器人面对不同环境类型时,通过多种不同的步态类型之间切换,提高整体的行进速度、机器人行走的稳定性和灵活性,进而提高通行效率。技术研发人员:刘锐军,胡春兰,陈洁鹰,朱明均,刘君,吴志刚,陈玮雨,刘晓春,雷普俊受保护的技术使用者:江西东锐智能装备科技股份有限公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240722/230910.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表