厂区铁路工位点安全防护方法和系统与流程
- 国知局
- 2024-08-01 08:25:31
本发明涉及智慧工厂中的工位点安全防护领域,具体地,涉及厂区铁路工位点安全防护方法和系统。
背景技术:
1、铁水运输系统是钢铁企业炼铁和炼钢工序的衔接过程,是钢铁制造流程的“生命线”,高炉、炼钢是连续式生产,铁水运输不能中断,且高炉的生产对铁路运输的时效性有极高的要求。此外,机车司机完成对机车的操作均是在室外完成,高炉、炼钢区域的环境中粉尘较多,作业环境恶劣,铁水是高温运输且存在溢出风险,对司机存在人身伤害的安全风险。因此厂区铁路铁水运输采用无人驾驶(自动驾驶)系统,智能化地高效运输作业、安全保产等已成为钢铁企业发展的趋势,也是智慧工厂的重要建设内容之一。
2、要实现厂区铁路铁水运输的无人驾驶,全流程的无人化,则必须对高炉、炼钢工位点进行安全管控,确保运行生产的安全:
3、1)以安全为第一原则,既要保证列车运行的安全,更要考虑相关作业人员的安全;
4、2)以技术手段保证安全为首要措施,以管理手段作为辅助;
5、3)系统及时检测出异常情况,并做出报警以及停车等措施。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种厂区铁路工位点安全防护方法和系统。
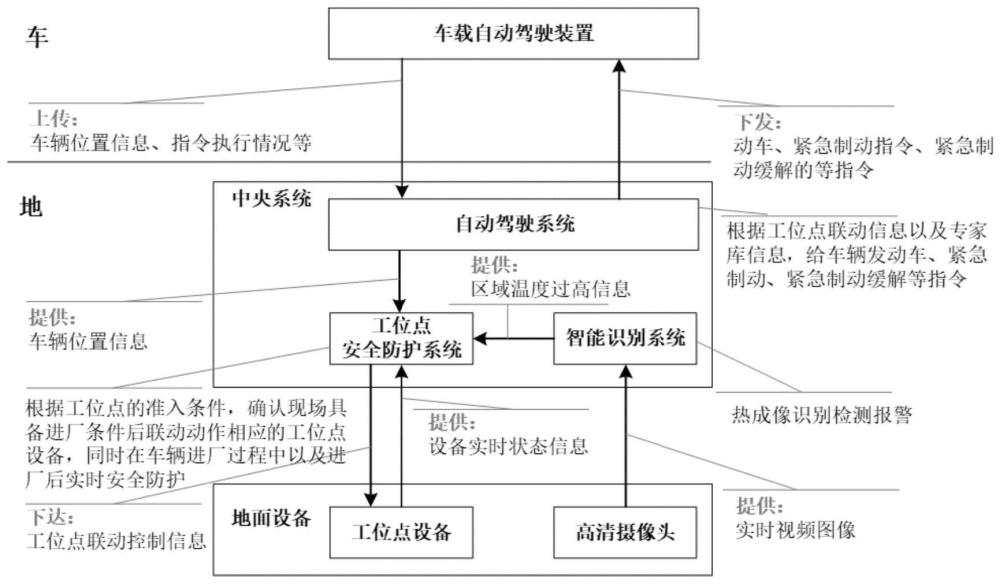
2、根据本发明提供的一种厂区铁路工位点安全防护系统,包括:控制系统、联动系统、视觉识别系统;
3、视觉识别系统对工位点界限进行实时监视,并在识别到异常时向控制系统发送异常报警;
4、控制系统根据异常报警后,向人员与联动系统发出应急处理通知;
5、联动系统接收到应急处理通知后,触发联动响应。
6、优选地,视觉识别系统包括在高炉和炼钢工位点安装的热成像双目摄像头,对限界实时监视,并实时检测环境温度进行异常报警;
7、控制系统接收到异常报警后提醒操作人员采取应急处理措施,同时通知联动系统触发车辆自动联动。
8、优选地,控制系统对工位点的卷帘门、自动接电装置、自动接电装置控制箱、厂门信号、充电桩这些设备的状态实时采集实时监测,发现异常情况及时报警。
9、优选地,对于无人车辆进入工位点,除了所述设备满足安全条件,厂门信号绿灯,视觉识别系统的中控摄像头允许中控人员通过中控摄像头查看限界是否正常并在正常时远程确认;
10、联动系统通过厂房信号控制箱实现对厂门、进路、控制指令及信号灯联动,实现各流程的风险识别、报警与处理。
11、优选地,对于空罐进高炉工位点、指令到高炉工位点,车辆自动驾驶到工位点厂门信号前停车,并自动触发控制系统;
12、控制系统检查厂门信号灯绿灯、检查充电装置是否收回,自动推出相应工位点的热成像摄像头,人工检查确认工位点限界安全后,控制系统自动给自动驾驶系统发送工位点对位指令,车辆对位结束后通过联动系统继续联锁保护工位点车辆不动,直到收到高炉铁水分割结束,收到重罐出高炉的指令,进入重罐出高炉的联锁保护程序。
13、优选地,控制系统检查厂门信号灯绿灯、检查充电装置是否停止充电并收回充电装置,控制系统自动推出相应工位点的热成像摄像头,人工检查确认工位点限界安全后,控制系统自动给自动驾驶系统发离开工位点指令,只有等车辆离开高炉后,控制系统才结束相应的高炉区域防护;
14、在对位过程中,只要厂门信号灯未收到绿灯、卷帘门未收到开到位信号、接电装置横臂伸出状态,联动系统都对车辆进行紧急制动。
15、优选地,对于重罐进炼钢工位点、指令到炼钢工位点,车辆自动驾驶到工位点厂门信号前停车,并自动触发控制系统;
16、控制系统检查厂门信号灯绿灯、卷帘门开到位信息、检查自动接电装置为归位状态,检查接电装置是否断电,若未断电,则需要在厂门信号灯绿灯且小臂归位状态的情况下,自动将接电装置断电,确保车辆进炼钢工位点过程中接电装置不会伸出导致被拉坏,同时控制系统自动推出相应工位点的作为中控摄像头的热成像摄像头,人工检查确认工位点限界安全后,控制系统自动给自动驾驶系统发工位点对位指令,车辆对位结束后,控制系统给接电装置上电,并向炼钢方触发到位对讲信号,联动系统联锁保护工位点车辆不动。
17、优选地,直到收到炼钢倒罐结束,收到空罐出炼钢的指令,进入空罐出炼钢的联锁保护程序;
18、控制系统检查厂门信号灯绿灯、卷帘门开到位信息、检查自动接电装置为归位状态,并在厂门信号灯绿灯且小臂归位状态的情况下,自动将接电装置断电,确保车辆进炼钢工位点过程中接电装置不会伸出导致被拉坏,同时控制系统自动推出相应工位点的作为中控摄像头的热成像摄像头,人工检查确认工位点限界安全后,控制系统自动给自动驾驶系统发离开工位点指令,只有等车辆离开炼钢后,控制系统才结束相应的炼钢区域防护;
19、在对位过程中,只要厂门信号灯未收到绿灯、卷帘门未收到开到位信号、接电装置横臂伸出状态,联动系统都对车辆进行紧急制动。
20、优选地,在工位点受铁水口的位置设置的热成像摄像机,在该处对角照射,视觉识别系统实现对该位置24小时不间断监控,并对鱼雷罐车于底下轨道空隙区域进行框定,进行热成像识别检测,当检测到框定区域内有温度大于设定值的异物掉落经过该区域时,控制系统自动发出报警,并通过联动系统将该报警的摄像机编号、位置信息发送给中央控制系统进行相关联动,通知相关人员现场确认安全后恢复;现场热成像双目摄像机检测区域温度过高,控制系统报警,铁水运输中控人员通过摄像头确认跑铁后,通知高炉方或炼钢及时进行处理。
21、根据本发明提供的一种厂区铁路工位点安全防护方法,采用所述的厂区铁路工位点安全防护系统进行防护。
22、与现有技术相比,本发明具有如下的有益效果:
23、1、本发明能够保证钢铁厂区无人驾驶列车在工位点的安全有效运行,并在必要时进行紧急制动,具有较大的应用前景。
24、2、本发明可以根据工位点的准入条件,确认现场具备进厂条件后联动相应工位点设备以及车辆自动进出厂,并在车辆进厂过程中以及进厂后实时进行安全防护。
25、3、本发明通过智能识别系统匹配联动模型,现场发生跑铁后能第一时间通知工作人员进行处理,最大化减少跑铁带来的损失。
技术特征:1.一种厂区铁路工位点安全防护系统,其特征在于,包括:控制系统、联动系统、视觉识别系统;
2.根据权利要求1所述的厂区铁路工位点安全防护系统,其特征在于,视觉识别系统包括在高炉和炼钢工位点安装的热成像双目摄像头,对限界实时监视,并实时检测环境温度进行异常报警;
3.根据权利要求2所述的厂区铁路工位点安全防护系统,其特征在于,控制系统对工位点的卷帘门、自动接电装置、自动接电装置控制箱、厂门信号、充电桩这些设备的状态实时采集实时监测,发现异常情况及时报警。
4.根据权利要求3所述的厂区铁路工位点安全防护系统,其特征在于,对于无人车辆进入工位点,除了所述设备满足安全条件,厂门信号绿灯,视觉识别系统的中控摄像头允许中控人员通过中控摄像头查看限界是否正常并在正常时远程确认;
5.根据权利要求3所述的厂区铁路工位点安全防护系统,其特征在于,对于空罐进高炉工位点、指令到高炉工位点,车辆自动驾驶到工位点厂门信号前停车,并自动触发控制系统;
6.根据权利要求4所述的厂区铁路工位点安全防护系统,其特征在于,控制系统检查厂门信号灯绿灯、检查充电装置是否停止充电并收回充电装置,控制系统自动推出相应工位点的热成像摄像头,人工检查确认工位点限界安全后,控制系统自动给自动驾驶系统发离开工位点指令,只有等车辆离开高炉后,控制系统才结束相应的高炉区域防护;
7.根据权利要求3所述的厂区铁路工位点安全防护系统,其特征在于,对于重罐进炼钢工位点、指令到炼钢工位点,车辆自动驾驶到工位点厂门信号前停车,并自动触发控制系统;
8.根据权利要求7所述的厂区铁路工位点安全防护系统,其特征在于,直到收到炼钢倒罐结束,收到空罐出炼钢的指令,进入空罐出炼钢的联锁保护程序;
9.根据权利要求3所述的厂区铁路工位点安全防护系统,其特征在于,在工位点受铁水口的位置设置的热成像摄像机,在该处对角照射,视觉识别系统实现对该位置24小时不间断监控,并对鱼雷罐车于底下轨道空隙区域进行框定,进行热成像识别检测,当检测到框定区域内有温度大于设定值的异物掉落经过该区域时,控制系统自动发出报警,并通过联动系统将该报警的摄像机编号、位置信息发送给中央控制系统进行相关联动,通知相关人员现场确认安全后恢复;现场热成像双目摄像机检测区域温度过高,控制系统报警,铁水运输中控人员通过摄像头确认跑铁后,通知高炉方或炼钢及时进行处理。
10.一种厂区铁路工位点安全防护方法,其特征在于,采用权利要求1至9中任一项所述的厂区铁路工位点安全防护系统进行防护。
技术总结本发明提供了一种厂区铁路工位点安全防护方法和系统,包括控制系统、联动系统、视觉识别系统;视觉识别系统对工位点界限进行实时监视,并在识别到异常时向控制系统发送异常报警;控制系统根据异常报警后,向人员与联动系统发出应急处理通知;联动系统接收到应急处理通知后,触发联动响应。本发明可以根据工位点的准入条件,确认现场具备进厂条件后联动相应工位点设备以及车辆自动进出厂,并在车辆进厂过程中以及进厂后实时进行安全防护,保证钢铁厂区无人驾驶列车在工位点的安全有效运行,并在必要时进行紧急制动,具有较大的应用前景。技术研发人员:吴娟,杜珊,胡云,吴泾,蔡春雷,刘焕,沈煜,伍文宇,申亮,叶林受保护的技术使用者:上海宝信软件股份有限公司技术研发日:技术公布日:2024/1/15本文地址:https://www.jishuxx.com/zhuanli/20240722/231689.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。