一种料盘专用多伸缩爪吊具的制作方法
- 国知局
- 2024-08-01 04:49:31
本发明涉及起重机领域,具体来说是涉及一种料盘专用多伸缩爪吊具,主要应用于料盘的吊装和转运工作。
背景技术:
1、在料盘吊运过程中,料盘因其结构特殊,较难实现的吊装和转运工作。一般的吊装链存在操作困难,工人劳动强度大的问题,因此需要一种可靠的专用的料盘吊具,以达到操作简单,减小工人工作强度的目的。
技术实现思路
1、本发明要解决的技术问题是:一种料盘专用多伸缩爪吊具,能够实现料盘的吊装转运工作。
2、为达到上述目的,本发明是通过以下技术方案实现的:
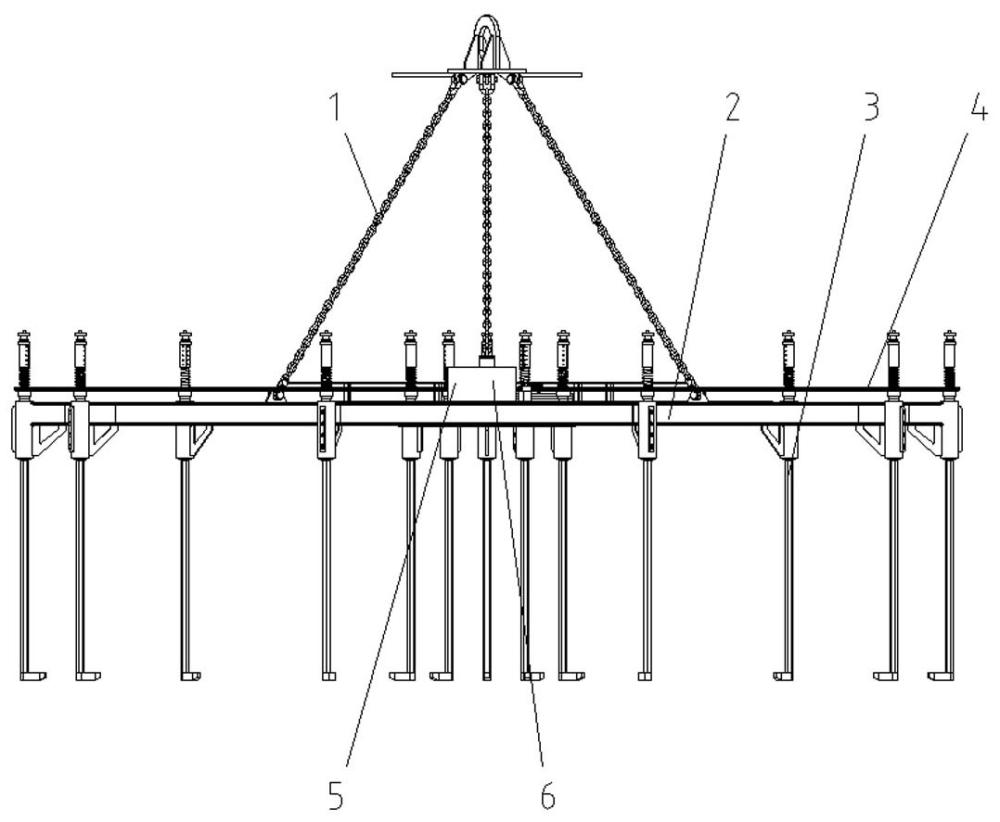
3、一种料盘专用多伸缩爪吊具,包括主体框架,在主体框架上方设置有上连接装置,在主体框架底部连接有至少一个伸缩旋转钩爪,伸缩旋转钩爪连接有驱动装置,驱动装置连接控制系统;
4、上连接装置包含防坠平衡装置,在防坠平衡装置的顶部设置有吊环,在防坠平衡装置的底部设置有至少一个吊装链;
5、主体框架主要包含承载框架,在承载框架的上方固定设置有上层环形走台,在承载框架的下方固定设置有下层走台;
6、承载框架包括多个内圈支撑杆和外圈支撑杆,多个内圈支撑杆和外圈支撑杆分别围成两个多边形结构,且该两个多边形结构同心;在相邻内圈支撑杆之间设置有支撑骨架,支撑骨架的底部穿过相邻两个外圈支撑杆;
7、伸缩旋转钩爪包括固定套筒,固定套筒内设置有活动套筒,活动套筒通过轴承滑动设置在固定套筒内,固定套筒的底部设置有限位环;且所述的活动套筒的底部固定连接有钩爪;所述的固定套筒通过焊接固定于主体框架;每个伸缩旋转钩爪设置在主体框架的承载框架上,即位于内圈支撑杆和外圈支撑杆的每个节点上;
8、在固定套筒的上方设置有链轮,链轮的顶部连接压簧的一端,压簧的另一端连接抱箍,抱箍的顶部连接有防脱装置;
9、驱动装置包含链条、驱动电机和驱动链轮;其中,驱动电机通过驱动链轮连接链条,在链条上设置有多个链轮,每个链轮对应一个伸缩旋转钩爪。
10、所述的驱动装置和控制系统均设置在主体框架上。
11、防坠平衡装置包括平衡板,在平衡板的下方设置有矩形管,矩形管外套在吊装链上。
12、在下层走台上设置有配重。
13、在固定套筒的侧方设置有导向尼龙块。
14、内圈支撑杆为六边形,在承载框架的内圈上设置有六个伸缩旋转钩爪,外圈支撑杆为九边形,在承载框架的外圈上设置有九个伸缩旋转钩爪,外圈九个钩爪旋转90°,内圈六个钩爪旋转100°。
15、在链条上设置有张紧装置。
16、与现有技术相比,本发明具有以下有益效果:通过设计一种料盘专用多伸缩爪吊具,能够实现料盘的吊装转运工作。同时,控制系统控制整个吊具的吊装动作,并对吊装过程的旋转钩爪的旋转角度等数据进行实时检测,保证吊装的安全性。
技术特征:1.一种料盘专用多伸缩爪吊具,其特征在于:包括主体框架(2),在主体框架(2)上方设置有上连接装置(1),在主体框架(2)底部连接有至少一个伸缩旋转钩爪(3),伸缩旋转钩爪(3)连接有驱动装置(4),驱动装置(4)连接控制系统(6);
2.根据权利要求1所述的一种料盘专用多伸缩爪吊具,其特征在于:所述的驱动装置(4)和控制系统(6)均设置在主体框架(2)上。
3.根据权利要求1所述的一种料盘专用多伸缩爪吊具,其特征在于:防坠平衡装置(9)包括平衡板(91),在平衡板(91)的下方设置有矩形管(92),矩形管(92)外套在吊装链(8)上。
4.根据权利要求1所述的一种料盘专用多伸缩爪吊具,其特征在于:在下层走台(12)上设置有配重(13)。
5.根据权利要求1所述的一种料盘专用多伸缩爪吊具,其特征在于:在固定套筒(18)的侧方设置有导向尼龙块(19)。
6.根据权利要求1所述的一种料盘专用多伸缩爪吊具,其特征在于:内圈支撑杆(111)为六边形,在承载框架(11)的内圈上设置有六个伸缩旋转钩爪(3),外圈支撑杆(113)为九边形,在承载框架(11)的外圈上设置有九个伸缩旋转钩爪(3),外圈九个钩爪(22)旋转90°,内圈六个钩爪(22)旋转100°。
7.根据权利要求1所述的一种料盘专用多伸缩爪吊具,其特征在于:在链条(23)上设置有张紧装置(26)。
技术总结一种料盘专用多伸缩爪吊具,包括主体框架,在主体框架上方设置有上连接装置,在主体框架底部连接有至少一个伸缩旋转钩爪,伸缩旋转钩爪连接有驱动装置,驱动装置连接控制系统;上连接装置包含防坠平衡装置,在防坠平衡装置的顶部设置有吊环,在防坠平衡装置的底部设置有至少一个吊装链;主体框架主要包含承载框架,在承载框架的上方固定设置有上层环形走台,在承载框架的下方固定设置有下层走台。与现有技术相比,本发明具有以下有益效果:通过设计一种料盘专用多伸缩爪吊具,能够实现料盘的吊装转运工作。同时,控制系统控制整个吊具的吊装动作,并对吊装过程的旋转钩爪的旋转角度等数据进行实时检测,保证吊装的安全性。技术研发人员:李国强,李毅斌,张宗山,郑海,孟凡东,朱飞,李文军,宋增,胡猛受保护的技术使用者:河南卫华重型机械股份有限公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240723/216895.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表