用于自主物料搬运车辆的操作辅助的制作方法
- 国知局
- 2024-08-01 05:08:16
背景技术:
1、已开发出用于运输被装载到一般标准化的运输平台上的货物的物料搬运车辆。例如,叉车可以用于提升装载到托盘上的货物,并且在诸如仓库或工厂之类的设施中的诸个位置之间移动货物。一些物料搬运车辆(诸如自动化导引车辆(agv))可以在没有人类操作者的情况下自主操作。其他物料搬运车辆是非自主的,并且是由人类操作的。在任何种类的物料搬运车辆中,通常期望用于改善操作效率的系统和方法。
2、对于某些类型的车辆,存在各种政府机构、法律、法规和条例规定的训练要求。例如,美国劳工部职业安全与健康管理局(osha)规定雇主有义务训练和监督各种类型的物料搬运车辆的操作者。还要求每三年进行重新认证。在某些实例中,在需要时应当向操作者提供相关主题的进修训练。在所有实例中,在任何行动的执行期间,操作者维持对物料搬运车辆的控制。此外,仓库管理者维持对仓库环境内的物料搬运车辆车队的控制。对操作者的训练和仓库管理者提供的监督要求有适当的操作实践等,包括操作者维持对物料搬运车辆的控制、注意操作环境、以及始终看向行驶方向等。
技术实现思路
1、本公开总体上涉及辅助在设施内操作的自主操作的物料搬运车辆。
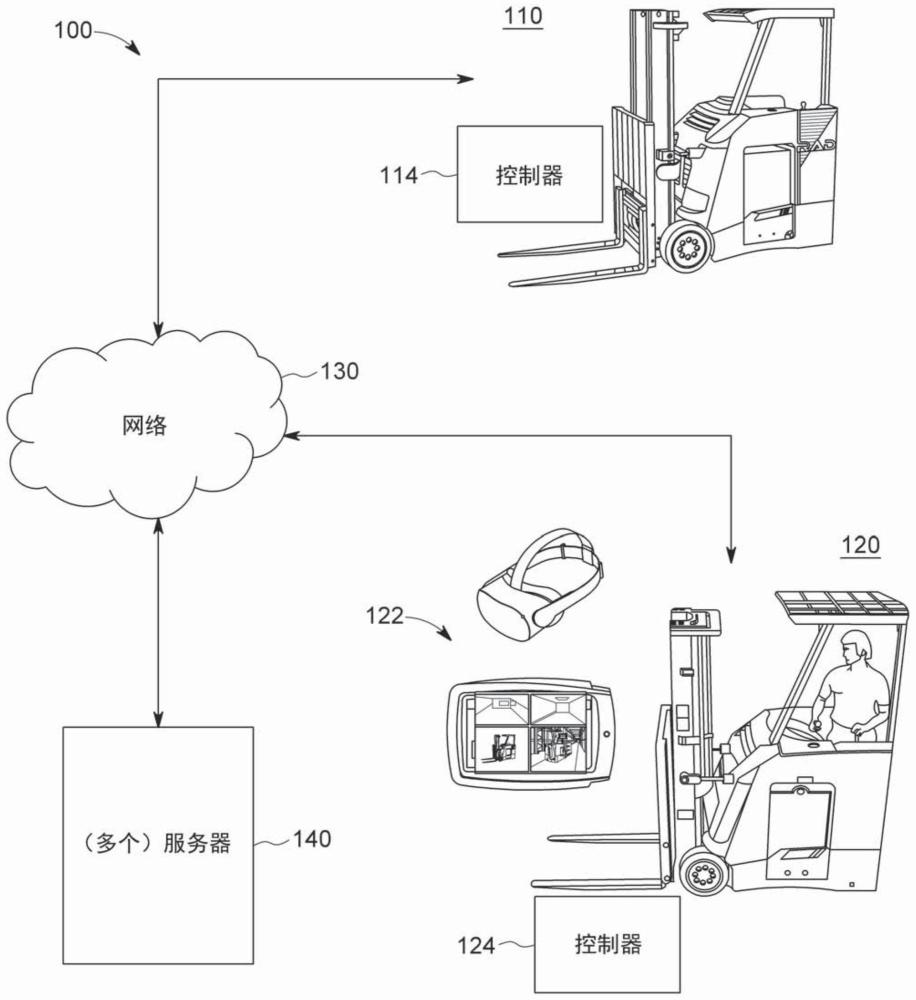
2、在一个方面中,本公开提供了一种系统,系统包括:在设施内自主操作的无人物料搬运车辆;以及在设施内由人类操作的有人物料搬运车辆。有人物料搬运车辆包括电路,电路使得有人物料搬运车辆用于:经由无线网络直接从无人物料搬运车辆接收辅助请求;将从无人物料搬运车辆接收的辅助请求通知给人类;从人类接收响应于从无人物料搬运车辆接收的辅助请求的输入;以及基于从有人物料搬运车辆上的人类接收的输入来影响无人物料搬运车辆的操作。
3、在另一方面中,本公开提供了一种物料搬运车辆,物料搬运车辆包括:通信接口,通信接口用于经由无线网络进行通信;用户界面,用户界面用于向操作物料搬运车辆的人类呈现数据,并且用于从操作物料搬运车辆的人类接收输入;以及控制器。控制器包括电路,电路使得控制器用于:接收经由无线网络直接从第二物料搬运车辆传送到物料搬运车辆的辅助请求,其中,第二物料搬运车辆将自主操作;经由用户界面将从第二物料搬运车辆接收的辅助请求通知给人类;经由用户界面从人类接收响应于从第二物料搬运车辆接收的辅助请求的输入;以及经由无线网络与第二物料搬运车辆通信,以根据从人类接收的输入影响第二物料搬运车辆的操作。
4、在又另一方面中,本公开提供了一种用于操作物料搬运车辆的方法,方法包括:确定自主物料搬运车辆需要在设施内操作的辅助;将与自主物料搬运车辆相关联的辅助请求传送到在设施内操作的非自主物料搬运车辆;将与自主物料搬运车辆相关联的辅助请求通知给操作非自主物料搬运车辆的人类;从操作非自主物料搬运车辆的人类接收响应于辅助请求的输入;以及基于来自操作非自主物料搬运车辆的人类的输入,影响自主物料搬运车辆的操作。
5、本公开的前述和其他方面及优点将通过以下说明书而显现。在说明书中,参考了形成其一部分且在其中通过图示的方式示出了本公开的优选配置的附图。然而,此类配置并不一定表示本公开的全部范围,并因此参考权利要求书和本文以解释本公开的范围。
技术特征:1.一种系统,所述系统包括:
2.如权利要求1所述的系统,其特征在于,所述有人物料搬运车辆的所述电路被配置成用于:通过将所述无人物料搬运车辆的操作模式从第一操作模式改变为第二操作模式来影响所述无人物料搬运车辆的所述操作,使得所述无人物料搬运车辆根据所述第二操作模式操作。
3.如权利要求2所述的系统,其特征在于,所述第一操作模式是正常操作模式,并且所述第二操作模式是远程辅助模式,并且其中,所述有人物料搬运车辆的所述电路被配置成用于:响应于将所述无人物料搬运车辆的所述操作模式改变为所述远程辅助模式而向所述人类呈现所述无人物料搬运车辆的实时视频馈送。
4.如权利要求2所述的系统,其特征在于,所述第一操作模式是正常操作模式,并且所述第二操作模式是远程辅助模式,并且其中,所述有人物料搬运车辆的所述电路被配置成用于:响应于将所述无人物料搬运车辆的所述操作模式改变为所述远程辅助模式而呈现所述无人物料搬运车辆的操作环境的实时渲染。
5.如权利要求1所述的系统,其特征在于,所述有人物料搬运车辆的所述电路被进一步配置成用于:经由虚拟现实头戴式设备向所述人类呈现所述无人物料搬运车辆的操作环境的实时渲染。
6.如权利要求1所述的系统,其特征在于,所述有人物料搬运车辆的所述电路被配置成用于:经由显示器或音频指示中的至少一者将从所述无人物料搬运车辆接收的所述辅助请求通知给所述人类。
7.如权利要求1所述的系统,其特征在于,所述有人物料搬运车辆的所述电路被配置成用于:经由所述有人物料搬运车辆上的触摸屏界面从所述人类接收所述输入。
8.如权利要求1所述的系统,其特征在于,所述有人物料搬运车辆的所述电路被配置成用于:通过转向或引导所述无人物料搬运车辆来影响所述无人物料搬运车辆的所述操作。
9.一种物料搬运车辆,所述物料搬运车辆包括:
10.如权利要求9所述的物料搬运车辆,其特征在于,所述用户界面包括虚拟现实头戴式设备,并且其中,所述控制器被进一步配置成用于经由所述虚拟现实头戴式设备向所述人类呈现所述无人物料搬运车辆的操作环境的实时渲染。
11.如权利要求9所述的物料搬运车辆,其特征在于:
12.如权利要求9所述的物料搬运车辆,其特征在于,所述用户界面包括触摸屏界面,以及所述控制器被配置成用于经由所述触摸屏界面从所述人类接收所述输入。
13.如权利要求9所述的物料搬运车辆,其特征在于,所述用户界面包括显示器,并且其中,所述控制器被进一步配置成用于经由所述显示器向所述人类呈现所述第二物料搬运车辆的实时视频馈送。
14.如权利要求9所述的物料搬运车辆,其特征在于,所述控制器被配置成用于:通过转向或引导所述第二物料搬运车辆来影响所述第二物料搬运车辆的所述操作。
15.如权利要求9所述的物料搬运车辆,其特征在于,所述控制器被配置成用于:通过改变所述第二物料搬运车辆的障碍物检测系统的参数来影响所述第二物料搬运车辆的所述操作。
16.一种用于操作物料搬运车辆的方法,所述方法包括:
17.如权利要求16所述的方法,其特征在于,影响所述自主物料搬运车辆的所述操作包括:引导所述自主物料搬运车辆;或者改变所述自主物料搬运车辆的障碍物检测系统的参数。
18.如权利要求16所述的方法,进一步包括:经由虚拟现实头戴式设备向操作所述非自主物料搬运车辆的所述人类呈现所述自主物料搬运车辆的操作环境的实时渲染。
19.如权利要求16所述的方法,其特征在于,影响所述自主物料搬运车辆的所述操作包括:将所述自主物料搬运车辆的操作模式从第一操作模式改变为第二操作模式,使得所述自主物料搬运车辆根据所述第二操作模式操作。
20.如权利要求16所述的方法,其特征在于,将与所述自主物料搬运车辆相关联的所述辅助请求传送到所述非自主物料搬运车辆包括:其中,经由无线网络将与所述自主物料搬运车辆相关联的所述辅助请求直接传送到所述非自主物料搬运车辆。
技术总结本公开总体上涉及诸如工厂或仓库之类的设施内的物料搬运车辆的自主操作。无人、自主物料搬运车辆在设施内操作时可能会遇到各种问题,并且可能需要辅助来解决这些问题。无人、自主物料搬运车辆可以向有人、非自主物料搬运车辆传送辅助请求,并且操作该有人、非自主物料搬运车辆的人类可以辅助该无人、自主物料搬运车辆。技术研发人员:F·D·贡萨尔维斯受保护的技术使用者:雷蒙德股份有限公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240723/218485.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表