一种基于激光切割后的金属材料自动分料方法、系统、分料终端机及可读存储介质与流程
- 国知局
- 2024-07-29 11:23:39
本发明属于金属材料分拣,尤其涉及一种基于激光切割后的金属材料自动分料方法、系统、分料终端机及可读存储介质。
背景技术:
1、光纤激光器(fiber laser)是用掺稀土元素玻璃光纤作为增益介质的激光器。目前光纤激光器被应用到众多领域(切割、打标、清洗、焊接、熔覆)。光纤激光器正逐步取代传统激光器在激光打标、激光焊接、激光切割等领域的主导地位。
2、虽然光纤激光器得到了广泛的应用,但基于光纤激光器切割后的零件,还是需要依托人工进行拾取、分类、码垛等整理,对人工的依赖性较强,导致人工分料容易出错,降低分料效率。而在现有技术中有公开实现自动分拣功能的激光切割机,比如现有文件中公开一种带分拣功能的激光切割机,该文件包括工作台组件和工件分拣组件。所述工作台组件包括外壳和滑轨ⅰ以及滑轨ⅱ,所述外壳内部一侧连接有操作台面,所述外壳内部另一侧放置有分拣框,所述工件分拣组件包括倒u形架、u形架、驱动件和夹持件以及推动件,所述倒u形架两端滑接于两个所述滑轨ⅰ,所述u形架两侧滑接于两个所述滑轨ⅱ,所述u形架上还成对固定有连杆。该文件采用夹持件将工件进行快速夹持,能够方便夹持不同金属材质的工件,进行分拣。
3、虽然减少使用了人工分拣的过程,该文件只能实现快速夹持,但是无法基于工件的类型,形状进行有效的分拣,也无法按照顺序有序的分拣,对于对工件的分类分拣以及按一定顺序分拣还需要人工进行处理。
技术实现思路
1、本发明提供的一种基于激光切割后的金属材料自动分料方法,以至少解决现有技术中对人工的依赖性较强,导致人工分料容易出错,降低分料效率的问题。
2、方法包括:
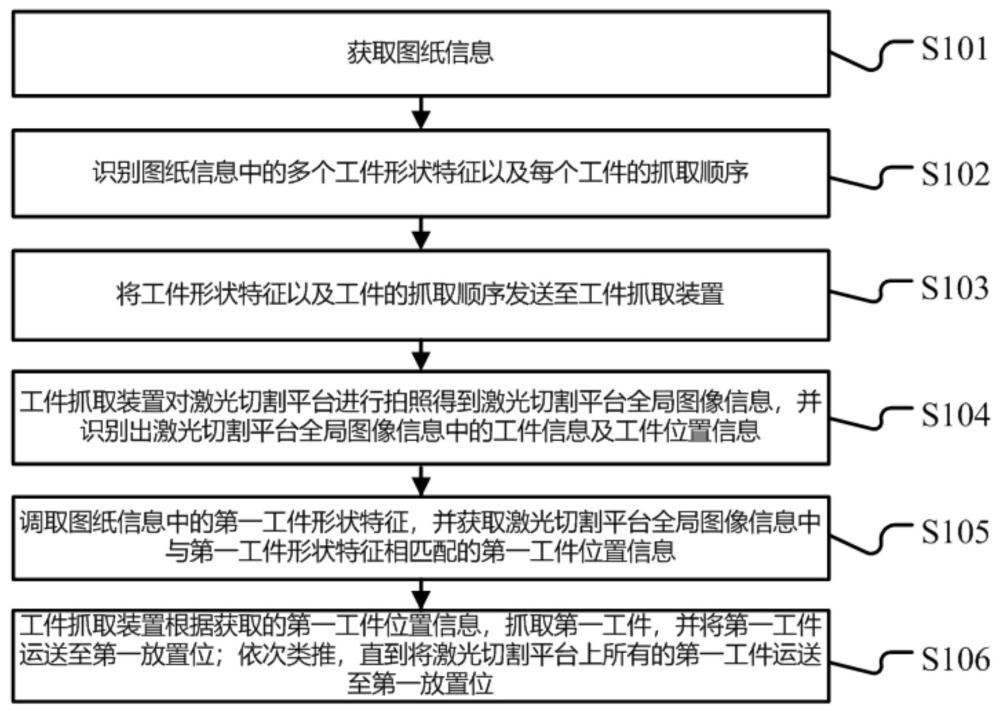
3、s101:获取图纸信息;
4、s102:识别图纸信息中的多个工件形状特征以及每个工件的抓取顺序;
5、s103:将工件形状特征以及工件的抓取顺序发送至工件抓取装置;
6、s104:工件抓取装置对激光切割平台进行拍照得到激光切割平台全局图像信息,并识别出激光切割平台全局图像信息中的工件信息及工件位置信息;
7、s105:调取图纸信息中的第一工件形状特征,并获取激光切割平台全局图像信息中与第一工件形状特征相匹配的第一工件位置信息;
8、s106:工件抓取装置根据获取的第一工件位置信息,抓取第一工件,并将第一工件运送至第一放置位;依次类推,直到将激光切割平台上所有的第一工件运送至第一放置位。
9、进一步需要说明的是,所述步骤s102中,sharptype函数识别图纸信息中的多个工件形状特征以及多个工件的排布顺序,通过ethercat通信协议将工件形状特征以及工件的抓取顺序发送至工件抓取装置。
10、进一步需要说明的是,所述步骤s102中,基于flann算法识别图纸信息中的多个工件形状特征以及多个工件的排布顺序。
11、进一步需要说明的是,步骤s104中,基于递归算法识别出激光切割平台全局图像信息中的工件信息及工件位置信息。
12、进一步需要说明的是,步骤s104中,还根据视觉坐标对工件进行定位,获取激光切割平台全局图像信息中的工件信息及工件位置信息。
13、进一步需要说明的是,工件信息及工件位置信息包括但不限于工件的中心坐标、顶点坐标、半径、弧度、线段长度。
14、进一步需要说明的是,步骤s106之后还包括:获取多个工件的抓取顺序,在运送完第一工件之后,调取图纸信息中的第二工件形状特征,并获取激光切割平台全局图像信息中与第二工件形状特征相匹配的第二工件位置信息;
15、工件抓取装置根据获取的第二工件位置信息,抓取第二工件,并将第二工件运送至第二放置位;依次类推,直到将激光切割平台上所有的第二工件运送至第二放置位。
16、本发明还提供一种基于激光切割后的金属材料自动分料系统,系统包括:图纸获取模块、工件特征及顺序识别模块、工件抓取装置、激光切割平台、工件识别模块以及工件匹配模块;
17、图纸获取模块用于基于usb接口,或有线,或无线通信网络获取图纸信息;
18、工件特征及顺序识别模块用于识别图纸信息中的多个工件形状特征以及每个工件的抓取顺序;
19、工件抓取装置上设置有图像采集装置,工件抓取装置用于获取工件形状特征以及工件的抓取顺序,并使用图像采集装置对激光切割平台进行拍照,得到激光切割平台全局图像信息;
20、工件识别模块用于识别出激光切割平台全局图像信息中的工件信息及工件位置信息;
21、工件匹配模块用于调取图纸信息中的第一工件形状特征,并获取激光切割平台全局图像信息中与第一工件形状特征相匹配的第一工件位置信息;
22、工件抓取装置根据获取的第一工件位置信息,抓取第一工件,并将第一工件运送至第一放置位;依次类推,直到将激光切割平台上所有的第一工件运送至第一放置位。
23、根据本申请的另一个实施例,提供了一种分料终端机,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现基于激光切割后的金属材料自动分料方法的步骤。
24、根据本申请的又一个实施例,还提供了一种可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述基于激光切割后的金属材料自动分料方法的步骤。
25、从以上技术方案可以看出,本发明具有以下优点:
26、本发明提供的基于激光切割后的金属材料自动分料方法,实现了自动识别图纸信息,得到多个工件形状特征以及每个工件的抓取顺序。再对激光切割平台进行拍照,得到激光切割平台全局图像信息,识别出激光切割平台全局图像信息中的工件信息及工件位置信息。调取图纸信息中的工件形状特征,并获取激光切割平台全局图像信息中与工件形状特征相匹配的工件位置信息;工件抓取装置根据获取的工件位置信息,抓取工件,并将工件运送至放置位;依次类推,直到将激光切割平台上所有的工件运送至放置位。这样,避免了人工分料容易出错,降低分料效率的问题。本发明提高了分料效率、减少人工参与,实现了分料整个过程的智能控制,运用ethercat通信技术实现系统中信息的通信,降低了信息传输的延迟、信息丢包等问题,实现反应快、控制精度高。进一步解决了现有对金属材料处理后人工进行拾取、分拣效率低的问题。提高了激光切割的工作效率。
技术特征:1.一种基于激光切割后的金属材料自动分料方法,其特征在于,方法包括:
2.根据权利要求1所述的基于激光切割后的金属材料自动分料方法,其特征在于,所述步骤s102中,sharptype函数识别图纸信息中的多个工件形状特征以及多个工件的排布顺序,通过ethercat通信协议将工件形状特征以及工件的抓取顺序发送至工件抓取装置。
3.根据权利要求1所述的基于激光切割后的金属材料自动分料方法,其特征在于,所述步骤s102中,基于flann算法识别图纸信息中的多个工件形状特征以及多个工件的排布顺序。
4.根据权利要求1所述的基于激光切割后的金属材料自动分料方法,其特征在于,步骤s104中,基于递归算法识别出激光切割平台全局图像信息中的工件信息及工件位置信息。
5.根据权利要求4所述的基于激光切割后的金属材料自动分料方法,其特征在于,步骤s104中,还根据视觉坐标对工件进行定位,获取激光切割平台全局图像信息中的工件信息及工件位置信息。
6.根据权利要求4所述的基于激光切割后的金属材料自动分料方法,其特征在于,工件信息及工件位置信息包括但不限于工件的中心坐标、顶点坐标、半径、弧度、线段长度。
7.根据权利要求1或2所述的基于激光切割后的金属材料自动分料方法,其特征在于,步骤s106之后还包括:获取多个工件的抓取顺序,在运送完第一工件之后,调取图纸信息中的第二工件形状特征,并获取激光切割平台全局图像信息中与第二工件形状特征相匹配的第二工件位置信息;
8.一种基于激光切割后的金属材料自动分料系统,其特征在于,系统用于实现如权利要求1至7任意一项所述的基于激光切割后的金属材料自动分料方法;系统包括:图纸获取模块、工件特征及顺序识别模块、工件抓取装置、激光切割平台、工件识别模块以及工件匹配模块;
9.一种分料终端机,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7任一项所述基于激光切割后的金属材料自动分料方法的步骤。
10.一种可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述基于激光切割后的金属材料自动分料方法的步骤。
技术总结本发明提供一种基于激光切割后的金属材料自动分料方法、系统、分料终端机及可读存储介质,属于金属材料分拣技术领域,获取图纸信息;识别图纸信息中的工件形状特征以及抓取顺序;工件抓取装置对激光切割平台进行拍照得到激光切割平台全局图像信息,并识别出工件信息及工件位置信息;调取图纸信息中的工件形状特征,并获取工件位置信息;工件抓取装置根据获取的工件位置信息,抓取工件,并将工件运送至放置位;依次类推,直到将激光切割平台上所有的工件运送至放置位。本发明实现自动分料功能,避免了人工拾取、分料处理导致效率低,容易出错的问题。同时实现了智能化产线配置,提升了生产效率。技术研发人员:宋文秀,王抗抗,刘可,荣国亚,王芳,孙健受保护的技术使用者:苏州森峰智能装备有限公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240725/135948.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表