一种罐体内壁喷涂机器人
- 国知局
- 2024-07-29 12:03:19
本发明涉及喷涂机器人领域,具体涉及一种罐体内壁喷涂机器人。
背景技术:
1、喷涂是通过喷枪或碟式雾化器,借助于压力或离心力,将涂料分散成均匀而微细的雾滴,施涂于被涂物表面的涂装方法。可分为空气喷涂、无空气喷涂、静电喷涂以及上述基本喷涂形式的各种派生方式。在建筑装修中比较常见,同时对一些产品、零件也能进行喷涂处理,以达到具有特殊性能或者更加美观的目的。
2、目前在对非敞开式罐口的罐体产品(例如一些真空压力储罐、一些罐口开在侧面的储罐等)内壁进行喷涂时,由于存在有部分内壁被遮挡,无法从罐口外喷涂到,大多需要工作人员手持喷枪,并将喷枪从罐口放置到罐体内部,再对罐体内壁进行喷涂处理,这种人工处理方式,不仅使得罐体内壁喷涂的均匀度不高,且效率较低,使用时较为不便。
技术实现思路
1、本发明的目的在于克服上述弊端提供一种罐体内壁喷涂机器人,该喷涂机器人可代替人工作业,且喷涂的均匀度高、喷涂效率高。
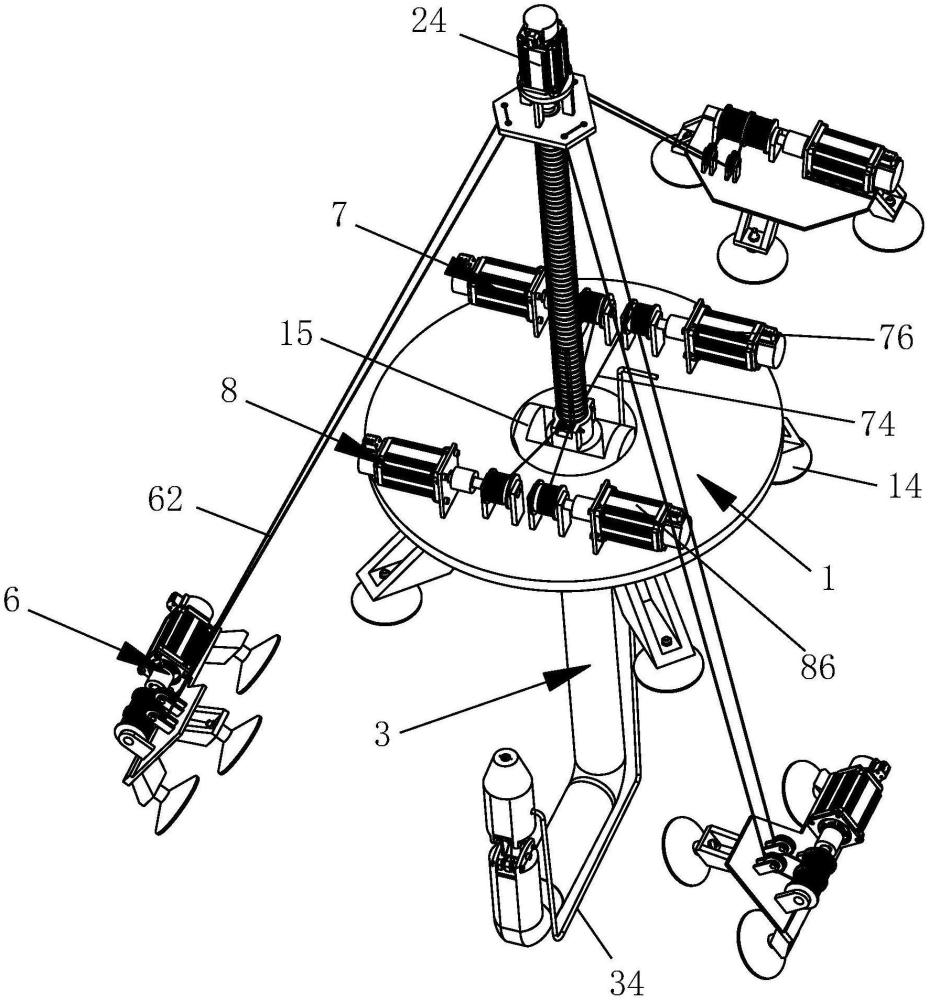
2、为实现上述目的,本发明采用了以下技术方案:包括支架及贯穿支架设置的花键杆,所述花键杆在靠近顶端的位置设有与花键杆转动连接的法兰盘,所述的花键杆上设有与其滑动连接的花键套筒,所述的法兰盘与花键套筒之间的花键杆上套设有弹簧,所述的弹簧的顶端与花键杆靠近法兰盘处设置的台阶相抵靠,所述弹簧的底端与花键套筒相抵靠,所述支架的中心处设有与支架转动连接的万向节,所述的花键套筒贯穿万向节且与万向节转动连接,所述花键杆的末端连接有机械臂;
3、所述的机械臂包括与花键杆末端相固定的大臂、与大臂通过肘关节相连的小臂、与小臂通过腕关节相连的末端喷嘴;所述的肘关节包括设置在大臂内部的关节卷筒,所述关节卷筒的卷筒轴与小臂连接;所述的腕关节包括竖直方向布置的关节连接板,所述关节连接板的上下两端分别与末端喷嘴及小臂转动连接;
4、还包括驱动花键杆沿z轴转动的第六电机、驱动花键杆沿x轴和y轴转动以及沿z轴移动的花键杆腱绳驱动装置、驱动小臂绕肘关节转动的肘关节腱绳驱动装置、驱动末端喷嘴绕腕关节转动的腕关节腱绳驱动装置;
5、所述的花键杆腱绳驱动装置包括连接法兰盘与第一滚筒的第一腱绳;所述的肘关节腱绳驱动装置包括连接关节卷筒与第二滚筒的第二腱绳以及连接关节卷筒与第三滚筒的第三腱绳,所述第二腱绳与第三腱绳在关节卷筒上的缠绕方向相反,第二腱绳与第三腱绳的收放配合使关节卷筒带动小臂沿x轴方向转动;所述的腕关节腱绳驱动装置包括连接末端喷嘴与第四滚筒的第四腱绳以及连接末端喷嘴与第五滚筒的第五腱绳,第四腱绳与第五腱绳的收放配合可使末端喷嘴沿z轴方向左右摆动。
6、所述的花键杆为中空结构,且花键杆的外壁上沿花键杆的轴向对称设有两组滑槽,所述的滑槽与花键套筒内壁上凸起的滑块相配合,所述花键杆的顶端通过联轴器与第六电机的输出轴连接,且第六电机的电机安装座固定在法兰盘的上表面,所述的法兰盘通过第一轴承与花键杆连接,所述花键杆靠近末端的位置沿花键杆的轴向对称设有两组方形孔洞,两组方形孔洞与两组滑槽均匀间隔布置,且方形孔洞与花键杆的内腔连通,所述的花键套筒、花键杆与法兰盘同心设置。
7、所述的支架包括通过滚珠轴承连接的上支板与下支板,所述上支板的中心处设有安装万向节的圆形通孔,所述的万向节与圆形通孔的内壁通过轴孔配合形成转动连接,所述万向节的中间开设有供花键杆穿过的方形通孔,花键杆上的花键套筒与方形通孔的内壁通过轴孔配合形成转动连接,且万向节的转动方向与花键套筒的转动方向相垂直,所述的下支板通过其底部设置的第二吸盘吸附在待喷涂罐体的外壁上。
8、所述的大臂及小臂均为l型臂体,其中:大臂竖直段的端部与花键杆末端连接,大臂水平段的端部与小臂水平段的端部贴合,小臂竖直段的端部通过关节连接板与末端喷嘴连接,且小臂与末端喷嘴之间留有间距;所述末端喷嘴的内部设有喷涂通道,该喷涂通道通过涂料导管与涂料桶连接;
9、所述关节卷筒的卷筒轴上设有第二轴承,所述大臂的内部设有与第二轴承相配合的轴承固定座,该轴承固定座设置在大臂靠近小臂的一端,所述第二轴承的外圈与轴承固定座连接,所述第二轴承的内圈与关节卷筒的卷筒轴连接,所述关节卷筒的卷筒轴伸入小臂内且与小臂内部设置的轴座固定连接。
10、所述的花键杆腱绳驱动装置还包括驱动第一滚筒转动的第一电机,第一腱绳的一端与第一滚筒固定,第一腱绳的另一端绕经导向轮后与法兰盘连接,所述的第一滚筒、第一电机、导向轮均固定在支撑板上,所述的支撑板通过其底部设置的第一吸盘吸附在待喷涂罐体的外壁上;所述的花键杆腱绳驱动装置沿法兰盘的周向均匀布置三组,且每组花键杆腱绳驱动装置中的第一腱绳均为并列设置的双索结构。
11、所述的肘关节腱绳驱动装置还包括分别驱动第二滚筒与第三滚筒转动的第二电机和第三电机,所述第二腱绳的一端与第二滚筒固定,第二腱绳的另一端依次绕经第一滑轮、第二滑轮、第三滑轮及第四滑轮后与关节卷筒连接,所述第三腱绳的一端与第三滚筒固定,第三腱绳的另一端依次绕经第五滑轮、第六滑轮、第七滑轮及第八滑轮后与关节卷筒连接,其中:第一滑轮与第五滑轮固定在花键套筒上,第二滑轮、第三滑轮、第四滑轮、第六滑轮、第七滑轮、第八滑轮均固定在大臂内部。
12、所述的第二电机及第三电机均固定在支架的上支板上,且第二滚筒与第三滚筒的轴线同心;所述的第一滑轮与第五滑轮同轴且通过第一滑轮座固定在花键套筒上,所述的第一滑轮座与花键杆上的一组方形孔洞的位置相对应;所述的第二滑轮与第六滑轮同轴且通过第二滑轮座固定在大臂靠近花键杆的一端;所述的第三滑轮与第七滑轮同轴且通过第三滑轮座固定在大臂的折弯处;所述的第四滑轮与第八滑轮分别通过第四滑轮座固定在大臂靠近小臂的一端并位于关节卷筒的下方;所述的第一滑轮、第二滑轮、第三滑轮、第四滑轮位于同侧,所述的第五滑轮、第六滑轮、第七滑轮、第八滑轮位于同侧。
13、所述的腕关节腱绳驱动装置还包括分别驱动第四滚筒与第五滚筒转动的第四电机和第五电机,所述第四腱绳的一端与第四滚筒固定,第四腱绳的另一端依次绕经第九滑轮、第十滑轮、第十一滑轮、第十二滑轮、第十三滑轮、第十四滑轮、第十五滑轮、第十六滑轮、第十七滑轮、第十八滑轮、第十九滑轮后与第二十滑轮固定,所述第五腱绳的一端与第五滚筒固定,第五腱绳的另一端依次绕经第二十一滑轮、第二十二滑轮、第二十三滑轮、第二十四滑轮、第二十五滑轮、第二十六滑轮、第二十七滑轮、第二十八滑轮、第二十九滑轮、第三十滑轮、第三十一滑轮后与第三十二滑轮固定,其中:第九滑轮与第二十一滑轮固定在花键套筒上,第十滑轮、第十一滑轮、第十二滑轮、第十三滑轮、第二十二滑轮、第二十三滑轮、第二十四滑轮、第二十五滑轮均固定在大臂内部,第十四滑轮、第十五滑轮、第十六滑轮、第十七滑轮、第二十六滑轮、第二十七滑轮、第二十八滑轮、第十九滑轮均固定在小臂内部,第十八滑轮、第二十滑轮、第三十滑轮、第三十二滑轮均固定末端喷嘴内部,且第十七滑轮、第十八滑轮、第十九滑轮、第二十滑轮位于关节连接板的同侧,第二十九滑轮、第三十滑轮、第三十一滑轮、第三十二滑轮位于关节连接板的另一侧。
14、所述的第四电机及第五电机均固定在支架的上支板上,且第四滚筒与第五滚筒的轴线同心,所述第四滚筒的轴线平行于第二滚筒的轴线;所述的第九滑轮与第二十一滑轮同轴且通过第五滑轮座固定在花键套筒上,所述的第五滑轮座与第一滑轮座沿花键杆的中轴线对称设置;第十滑轮与第二十二滑轮同轴且通过第六滑轮座固定在大臂靠近花键杆的一端,所述的第六滑轮座与第二滑轮座沿大臂竖直段的中轴线对称设置;所述的第十一滑轮与第二十三滑轮同轴且通过第七滑轮座固定在大臂的折弯处;所述第十二滑轮与第二十四滑轮的轮轴同心且分别通过第八滑轮座固定在大臂水平段内;所述第十三滑轮与第二十五滑轮的轮轴同心且分别通过第九滑轮座固定在大臂水平段的中部;所述第十四滑轮与第二十六滑轮的轮轴同心,所述第十五滑轮与第二十七滑轮的轮轴同心,所述的第十四滑轮与第十五滑轮通过第十滑轮座固定在小臂靠近大臂的一端,所述的第二十六滑轮与第二十七滑轮通过第十一滑轮座固定在小臂靠近大臂的一端;所述第十六滑轮与第二十八滑轮的轮轴同心且分别通过第十二滑轮座固定在小臂的折弯处;所述的第十七滑轮与第十九滑轮同轴且通过第十三滑轮座固定在小臂竖直段的端部;所述的第二十九滑轮与第三十一滑轮同轴且通过第十四滑轮座固定在小臂竖直段的端部,所述的第十三滑轮座与第十四滑轮座沿关节连接板对称设置;所述的第十八滑轮与第二十滑轮同轴且通过第十五滑轮座固定在末端喷嘴靠近小臂的一端;所述的第三十滑轮与第三十二滑轮同轴且通过第十六滑轮座固定在末端喷嘴靠近小臂的一端,所述的第十五滑轮座与第十六滑轮座沿关节连接板对称设置;
15、所述的第九滑轮、第十滑轮、第十一滑轮、第十二滑轮、第十三滑轮、第十四滑轮、第十五滑轮、第十六滑轮、第十七滑轮、第十八滑轮、第三十一滑轮、第三十二滑轮位于同侧,所述的第二十一滑轮、第二十二滑轮、第二十三滑轮、第二十四滑轮、第二十五滑轮、第二十六滑轮、第二十七滑轮、第二十八滑轮、第十九滑轮、第二十滑轮、第二十九滑轮、第三十滑轮位于同侧,且第十七滑轮与第二十滑轮、第十八滑轮与第十九滑轮、第二十九滑轮与第三十二滑轮、第三十滑轮与第三十一滑轮均分别在竖直面内呈对角线布置,第十七滑轮与第二十九滑轮、第十八滑轮与第三十滑轮、第十九滑轮与第三十一滑轮、第二十滑轮与第三十二滑轮均分别在水平面内呈对角线布置。
16、本发明的有益效果在于:
17、1)本发明采用串联机械臂和并联机器人合并的结构实现了对非敞口罐体内壁进行喷涂的自动化设备,以代替目前需要人工对非敞开式罐口的罐体进行喷涂的现状。
18、2)本发明采用了吸盘结构的底座来将喷涂机器人固定在罐体上,使本发明能够更加适用于多种不同形状罐体并且拆装方便,在面对敞口罐体时也可以另外搭设工作台来放置本发明。
19、3)本发明整体的驱动结构采用了绳驱动的结构设计,实现了机器人的驱动电机全部位于罐体外部,从而保护电机免受罐内喷涂环境的干扰并且便于日常维护、损坏后的更换以及进行作业时的散热。
本文地址:https://www.jishuxx.com/zhuanli/20240725/138933.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。