一种多功能牵拉型机械臂的制作方法
- 国知局
- 2024-08-05 12:27:40
本技术涉及口腔医疗器械领域,尤其涉及一种多功能牵拉型机械臂。
背景技术:
1、在牙科治疗过程中,尤其是牙体牙髓的诊疗过程中,常需要显微镜辅助治疗以提高诊疗效果和预后,根据显微镜的成像和放大原理,需要牙体牙髓专科医生持口镜的左手保持高度的稳定以保证镜下清晰的视野,从长期来看,这将导致医生左手过度疲劳,不利于医疗的可持续发展;此外,由于个体存在差异性,口镜牵拉唇颊肌时所需力量不同,因此肌肉较为肥厚和紧张的患者暴露视野较为困难,不利于诊疗的顺利进行。另外,随着超声、激光技术等发展,根管治疗过程中根管内保持液体灌注至关重要,如有辅助固定装置对于冲洗设备等进行加持,固定角度,将有利于四手护士协助操作时精度的提高。
2、专利文献cn215424528u公开一种口腔医学修复专用口镜,口镜的上端固接有固定块,固定块的上端安装有软管,所述软管的上端固接有固定杆,固定杆的外表面套设有固定柱,固定柱的上端固接有安装块,安装块的上端固接有固定板,固定柱的内部开设有安装槽,安装槽的上内壁上安装有微型电动伸缩杆,通过微型电动伸缩杆带动固定杆在固定柱的内部进行伸缩,可以自动地调节口镜在口腔内的长度,从而避免了需要手动调节,通过橡胶柱、滑槽和滑块的相互配合,可以快速地将一个限位块拉开,限位槽内橡胶垫的设计可以使口镜与支架之间的连接更加稳固,安装板上安装孔的设计,可以使口镜与支架之间的连接更加紧固。
3、以上方案中,该器械设置具有伸缩功能以及固定装置,但是该固定仍需要手持器械进行操作,无法实现任一角度悬停要求,稳定性差,更无法调节牵引力度,无法解放在诊疗期间医生的左手,降低疲劳感,因此,有必要提供一种多功能牵拉型机械臂,以解决现有技术的不足。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,提供一种多功能牵拉型机械臂。
2、本实用新型为解决其技术问题所采用的技术方案是:
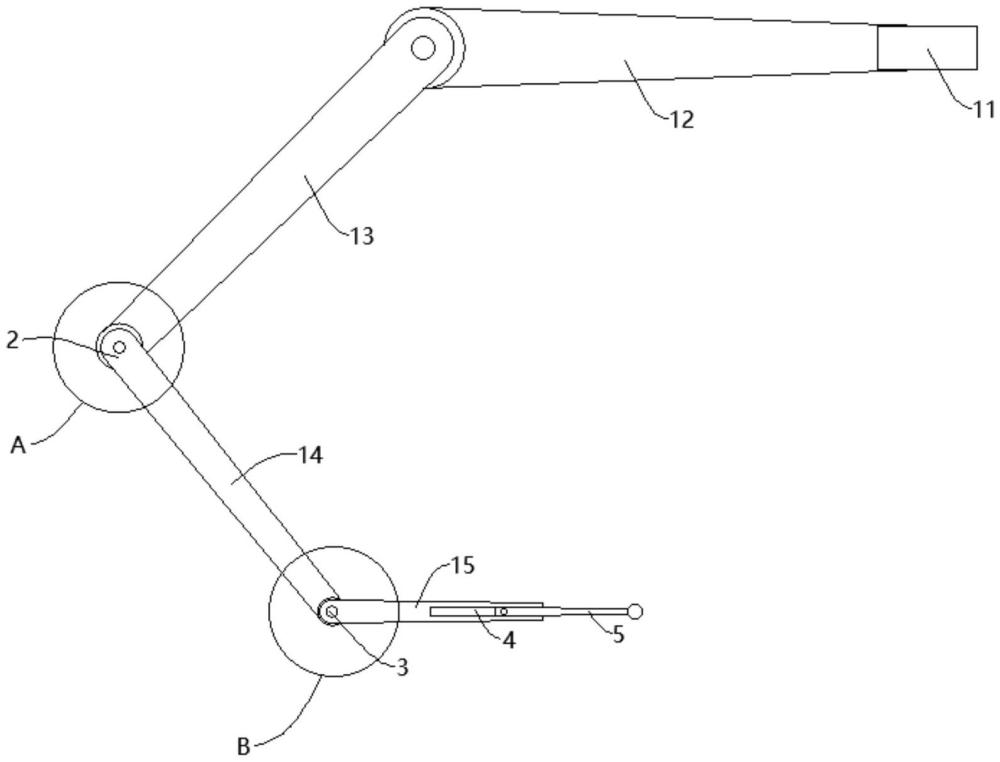
3、一种多功能牵拉型机械臂,包括连杆,连杆分为第一连杆、第二连杆、第三连杆、第四连杆和第五连杆,第一连杆、第二连杆、第三连杆、第四连杆和第五连杆依次两两相连,还包括:
4、无级调节关节机构,该无级调节关节机构设置于第一连杆与第二连杆连接处、第二连杆与第三连杆连接处以及第三连杆与第四连杆连接处,通过无级调节关节机构使得各个连杆移动时能够在任一角度悬停;
5、牵引力调节关节机构,该牵引力调节关节机构设置于第四连杆与第五连杆连接处,通过牵引力调节关节机构调节第四连杆与第五连杆之间的阻尼以及移动第五连杆所需的牵引力度。
6、本实用新型进一步设置为,无级调节关节机构包括:
7、第一阻尼片,该第一阻尼片设置于第四连杆外侧,并与第四连杆外侧表面贴合;
8、第二阻尼片,该第二阻尼片设置于第四连杆内侧,并与第四连杆内侧表面贴合;
9、阻尼压板,该阻尼压板与第三连杆抵合;
10、金属弹簧杆,该金属弹簧杆设置于第二阻尼片和阻尼压板之间;
11、紧固螺栓,该紧固螺栓从外到内依次穿过第一阻尼片、第四连杆、第二阻尼片、阻尼压板和第三连杆。
12、本实用新型进一步设置为,紧固螺栓设置有与其螺纹匹配的紧固螺母,紧固螺栓和紧固螺母配合将第一阻尼片、第四连杆、第二阻尼片、金属弹簧杆、阻尼压板和第三连杆压紧,通过预压的金属弹簧杆产生稳定压力并压迫第二阻尼片产生阻尼效果,从而对转动后第四连杆进行固定,使得第四连杆可以在竖向方向任一角度悬停。
13、本实用新型进一步设置为,紧固螺栓分为螺栓帽段、粗径段、中径段和细径段,粗径段与第一阻尼片、第四连杆、第二阻尼片和阻尼压板孔径匹配,中径段与第三连杆孔径匹配,细径段与紧固螺母孔径匹配。
14、本实用新型进一步设置为,第一连杆与第二连杆连接处设有无级调节关节机构,可以使得第二连杆可以在横向方向任一角度悬停。
15、本实用新型进一步设置为,牵引力调节关节机构包括:
16、第三阻尼片,该第三阻尼片设置于第五连杆外侧,并与第五连杆外侧表面贴合;
17、第四阻尼片,该第四阻尼片设置于第五连杆内侧,并与第五连杆内侧表面贴合;
18、第一阻尼轴套,该第一阻尼轴套设置于第三阻尼片外侧;
19、第一金属弹片,该第一金属弹片设置于第三阻尼片和第一阻尼轴套之间;
20、第二阻尼轴套,该第二阻尼轴套设置于第四连杆与第五连杆之间;
21、第二金属弹片,该第二金属弹片设置于第四阻尼片和第二阻尼轴套之间;
22、调节旋钮,该调节旋钮从外到内依次穿过第一阻尼轴套、第一金属弹片、第三阻尼片、第五连杆、第四阻尼片、第二金属弹片、第二阻尼轴套和第四连杆,通过调节旋钮调节第五连杆移动所需牵引力大小。
23、本实用新型进一步设置为,调节旋钮设置有与其螺纹匹配的调节螺母,调节螺母与第四连杆固定连接,调节旋钮和调节螺母配合将第一阻尼轴套、第一金属弹片、第三阻尼片、第五连杆、第四阻尼片、第二金属弹片、第二阻尼轴套和第四连杆压紧,通过第一金属弹片和第二金属弹片产生稳定压力并压迫第三阻尼片和第四阻尼片产生阻尼效果,从而对转动后第五连杆进行固定。
24、本实用新型进一步设置为,第五连杆末端设有滑轨,滑轨上设有凸环,通过凸环固定带有孔环的器械,使得器械能够在滑轨上滑动。
25、本实用新型进一步设置为,第一连杆设有第一伺服电机,第一伺服电机输出端通过传动机构控制第二连杆摆动,第二连杆设有第二伺服电机,第二伺服电机输出端通过传动机构控制第三连杆摆动,第三连杆设有第三伺服电机,第三伺服电机输出端通过传动机构控制第四连杆摆动,第四连杆设有第四伺服电机,第四伺服电机输出端通过传动机构控制第五连杆摆动。
26、综上所述,本实用新型具有以下有益效果:
27、本实用新型通过无级调节关节机构能够实现第五连杆末端和与之相连的多种牵拉器械在任一角度悬停,且稳定性较高,解放在诊疗期间医生的左手,降低疲劳感,并通过牵引力调节关节机构调节所需要的牵引力度,使得操作过程更精细,提高工作效率,缩短诊疗时间,通过滑轨实现多种牵拉器械的伸缩且便于多种牵拉器械更换。
技术特征:1.一种多功能牵拉型机械臂,包括连杆,连杆分为第一连杆、第二连杆、第三连杆、第四连杆和第五连杆,第一连杆、第二连杆、第三连杆、第四连杆和第五连杆依次两两相连,其特征在于,还包括:
2.根据权利要求1所述的一种多功能牵拉型机械臂,其特征在于,无级调节关节机构包括:
3.根据权利要求2所述的一种多功能牵拉型机械臂,其特征在于,紧固螺栓设置有与其螺纹匹配的紧固螺母,紧固螺栓和紧固螺母配合将第一阻尼片、第四连杆、第二阻尼片、金属弹簧杆、阻尼压板和第三连杆压紧,使得第四连杆可以在竖向方向任一角度悬停。
4.根据权利要求3所述的一种多功能牵拉型机械臂,其特征在于,紧固螺栓分为螺栓帽段、粗径段、中径段和细径段,粗径段与第一阻尼片、第四连杆、第二阻尼片、金属弹簧杆和阻尼压板孔径匹配,中径段与第三连杆孔径匹配,细径段与紧固螺母孔径匹配。
5.根据权利要求1所述的一种多功能牵拉型机械臂,其特征在于,第一连杆与第二连杆连接处设有无级调节关节机构,可以使得第二连杆可以在横向方向任一角度悬停。
6.根据权利要求1所述的一种多功能牵拉型机械臂,其特征在于,牵引力调节关节机构包括:
7.根据权利要求6所述的一种多功能牵拉型机械臂,其特征在于,调节旋钮设置有与其螺纹匹配的调节螺母,调节螺母与第四连杆固定连接,调节旋钮和调节螺母配合将第一阻尼轴套、第一金属弹片、第三阻尼片、第五连杆、第四阻尼片、第二金属弹片、第二阻尼轴套和第四连杆压紧。
8.根据权利要求1所述的一种多功能牵拉型机械臂,其特征在于,第五连杆末端设有滑轨,滑轨上设有凸环,通过凸环固定带有孔环的器械,使得器械能够在滑轨上滑动。
9.根据权利要求1所述的一种多功能牵拉型机械臂,其特征在于,第一连杆设有第一伺服电机,第一伺服电机输出端通过传动机构控制第二连杆摆动,第二连杆设有第二伺服电机,第二伺服电机输出端通过传动机构控制第三连杆摆动,第三连杆设有第三伺服电机,第三伺服电机输出端通过传动机构控制第四连杆摆动,第四连杆设有第四伺服电机,第四伺服电机输出端通过传动机构控制第五连杆摆动。
技术总结本技术提出一种多功能牵拉型机械臂,包括连杆,连杆分为第一连杆、第二连杆、第三连杆、第四连杆和第五连杆,第一连杆、第二连杆、第三连杆、第四连杆和第五连杆依次两两相连,还包括无级调节关节机构和牵引力调节关节机构,无级调节关节机构设置于第一连杆与第二连杆连接处、第二连杆与第三连杆连接处以及第三连杆与第四连杆连接处,通过无级调节关节机构使得各个连杆移动时能够在任一角度悬停,解放在诊疗期间医生的左手,降低疲劳感;牵引力调节关节机构设置于第四连杆与第五连杆连接处,通过牵引力调节关节机构调节第四连杆与第五连杆之间的阻尼以及移动第五连杆所需的牵引力度,使得操作过程更精细,提高工作效率。技术研发人员:韦晓玲,黄雪莹受保护的技术使用者:上海市口腔医院(上海市口腔健康中心)技术研发日:20231025技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240725/262765.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表