一种电气自动化焊接工业机器人
- 国知局
- 2024-08-05 12:47:21
本技术属于焊接机器人,具体涉及一种电气自动化焊接工业机器人。
背景技术:
1、电气自动化焊接机器人是一种利用电气控制技术和自动化技术实现焊接作业的工业机器人,电气自动化焊接机器人是一种能够在有害环境下进行高效、高质量的焊接作业的工业机器人,电气自动化焊接机器人的应用已经广泛涉及汽车、造船、机械、电力等领域,为各行各业的生产和发展带来了巨大的好处。在生产过程中,对于复杂或不规则的焊件,视觉系统需要对其进行三维重建,并根据三维模型计算出焊缝在空间中的坐标和方向,并将这些信息传送给机器人,以便于机器人对焊枪进行精确的控制。
2、授权公告号cn112122840a的专利文件公开了一种基于机器人焊接的视觉定位焊接系统及焊接方法,由手眼标定模块、拍照点位记录模块、焊接执行模块构成。所述手眼标定模块用于计算相机坐标系与机器人坐标系的位姿转换关系;所述拍照点位记录模块获取交叉钢筋的三维信息,通过钢筋点云焊线提取算法,计算交叉钢筋的焊接路径,并将焊接路径发送至焊接执行模块,焊接执行模块完成钢筋交叉点的焊接作业,实现了钢筋焊接的自动化,提升了焊接效果与生产效率。但是该焊接系统存在以下缺陷:视觉定位系统的拍照焊枪附近,焊枪在焊接的时候温度较高,导致设置在焊枪附近的视觉相机容易受高温影响,同时焊接过程中有较多的火花飞溅,导致视觉相机的表面产生污渍,影响了相机定位的精准度。
技术实现思路
1、为解决现有技术中存在的上述问题,本实用新型提供了一种电气自动化焊接工业机器人。
2、本实用新型的目的可以通过以下技术方案实现:
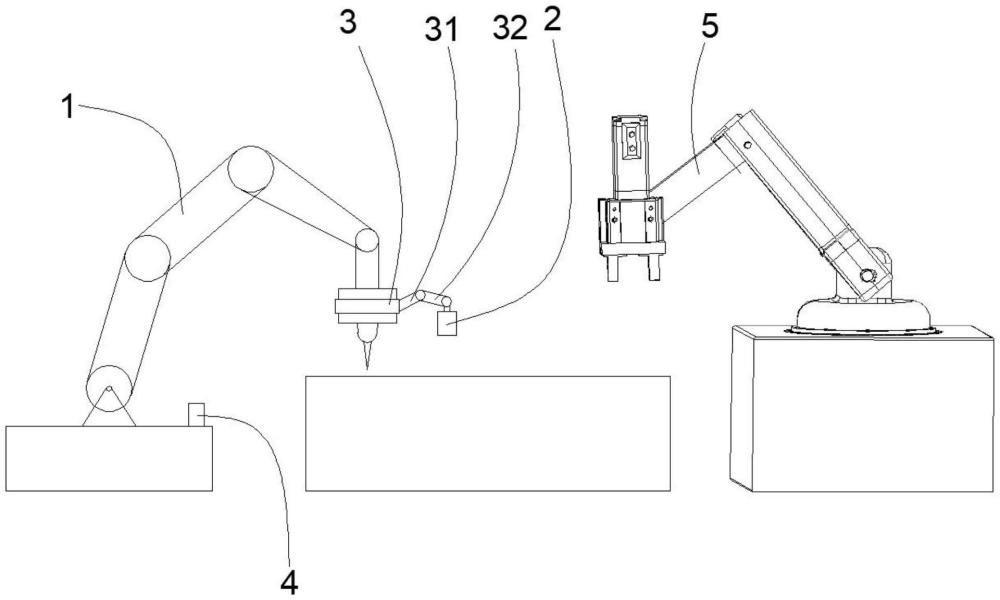
3、一种电气自动化焊接工业机器人,包括焊接机器人本体、视觉定位相机和调节组件,所述调节组件与焊接机器人本体铰接,所述调节组件绕所述焊接机器人本体转动,所述视觉定位相机与所述调节组件相接。
4、优选的,所述调节组件包括连接杆和活动杆,所述连接杆一端与焊接机器人本体铰接,所述连接杆另一端与所述活动杆铰接,所述活动杆与所述视觉定位相机相接。
5、优选的,所述活动杆与所述视觉定位相机铰接,用于调节视觉定位相机与焊件之间的角度。
6、优选的,所述焊接机器人本体一侧固定连接有自动清枪器。
7、优选的,所述焊接机器人本体一侧固定连接有补光灯。
8、优选的,还包括夹持机械手,所述夹持机械手与所述焊接机器人本体相对而设。
9、本实用新型的有益效果为:
10、通过把视觉定位相机设置远离焊枪,避免了视觉定位相机受高温影响,同时,调节组件通过改变视觉定位相机的位置,躲避焊接过程中飞溅的火花,进而防止视觉定位相机损坏。
技术特征:1.一种电气自动化焊接工业机器人,其特征在于,包括焊接机器人本体、视觉定位相机和调节组件,所述调节组件与焊接机器人本体铰接,所述调节组件绕所述焊接机器人本体转动,所述视觉定位相机与所述调节组件相接。
2.根据权利要求1所述的一种电气自动化焊接工业机器人,其特征在于,所述调节组件包括连接杆和活动杆,所述连接杆一端与焊接机器人本体铰接,所述连接杆另一端与所述活动杆铰接,所述活动杆与所述视觉定位相机相接。
3.根据权利要求2所述的一种电气自动化焊接工业机器人,其特征在于,所述活动杆与所述视觉定位相机铰接,用于调节视觉定位相机与焊件之间的角度。
4.根据权利要求1所述的一种电气自动化焊接工业机器人,其特征在于,所述焊接机器人本体一侧固定连接有自动清枪器。
5.根据权利要求1所述的一种电气自动化焊接工业机器人,其特征在于,所述焊接机器人本体一侧固定连接有补光灯。
6.根据权利要求1所述的一种电气自动化焊接工业机器人,其特征在于,还包括夹持机械手,所述夹持机械手与所述焊接机器人本体相对而设。
技术总结本技术涉及一种电气自动化焊接工业机器人,属于焊接机器人技术领域,包括焊接机器人本体、视觉定位相机和调节组件,所述调节组件与焊接机器人本体铰接,所述调节组件绕所述焊接机器人本体转动,所述视觉定位相机与所述调节组件相接,使视觉定位相机远离了焊枪,避免了视觉定位相机受高温影响,同时,调节组件通过改变视觉定位相机的位置,躲避焊接过程中飞溅的火花,进而防止视觉定位相机损坏。技术研发人员:张士林,何康辉,赵茂林,伍卓彬,翁靖淇,张俊栋受保护的技术使用者:江门市新会技师学院技术研发日:20230830技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240725/264464.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表