一种采动影响下煤矿突水救援机器人及救援系统
- 国知局
- 2024-07-27 10:25:11
本发明属于煤炭开采领域,具体涉及一种采动影响下煤矿突水救援机器人及救援系统。
背景技术:
1、煤炭是我国传统能源之一,也一直是我国国民经济发展的主要能源之一,在我国能源的消费结构中占了主要的地位,但煤炭开采过程中常常受到水害威胁,给我国能源安全和国民经济稳定发展带来隐患。
2、矿井在建设和生产过程中,地面水和地下水通过各种通道涌入矿井,当矿井涌水超过正常排水能力时,就造成矿井水灾。矿井水灾(通常称为透水),是煤矿常见的主要灾害之一。一旦发生透水,不但影响矿井正常生产,而且有时还会造成人员伤亡,淹没矿井和采区,危害十分严重。所以做好矿井防水工作,是保证矿井安全生产的重要内容之一。随着安全生产投入不断增加,煤矿安全生产形势有所改善,但是由于煤炭回采受水、瓦斯、地质构造以及地应力等影响,在回采过程中存在诸多的不安全事故,煤矿安全事故仍时有发生。水害是导致煤矿出现重大安全风险的不利因素,煤炭开采时大气降水、地下水以及采空区(老窑)积水等通过渗入、涌入或者突入等方式进入到开采空间,影响煤炭正常生产,严重时甚至出现淹井事故。
3、当矿井发生大型透水事故时会淹没采区甚至整个矿井,严重时会造成大量的人员伤亡以及财产损失,给矿井带来灾难性影响。矿井出现水害事故后,会冲垮巷道或者淹没人员,给后续的抢险救灾带来较大难度。在井下出现透水事故的过程中,会携带大量的矸石、泥沙,大量的淤积物充填在巷道内给救援人员正常行进带来影响,延误应急救援时间。其中透水时还可能会携带大量的瓦斯等有害气体,给井下人员安全带来较大威胁。透水事故发生后,即使遇难人员位置确定,救援人员也很难进行及时救援。
4、近些年来,随着矿井采掘深度增加,矿井生产受到水害制约更为明显,承压水、采空区老窑积水成为制约矿井生产安全的重大隐患。若矿井生产过程中出现突水事故,水害发生后的快速抢险救援对减少矿井损失或者人员伤亡具有重要意义。
5、矿井水灾事故救援,是一项烦琐、复杂且困难的事情。为推动水灾防治向智能化转变保障煤炭工业生产安全,为应对水灾事故发生后对人员进行及时救治,亟需一种应急救方法提升水害应急救援效果。
技术实现思路
1、为解决矿井生产过程中出现突水事故时,造成大量的人员伤亡以及财产损失的问题,本发明提供了一种采动影响下煤矿突水救援机器人及救援系统,能够减少矿井损失和人员伤亡。
2、为实现上述发明目的,本发明采用以下技术方案予以实现:
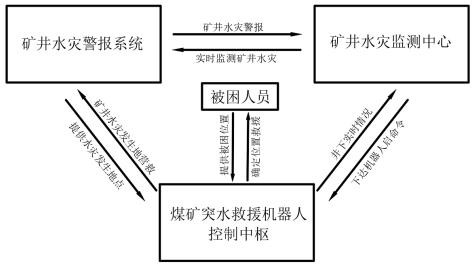
3、一种采动影响下煤矿突水救援机器人及救援系统,它包括矿井水灾警报系统、矿井水灾监测中心、机器人控制中枢和机器人本体,所述矿井水灾警报系统、矿井水灾监测中心和机器人控制中枢之间互为无线信号连接, 所述矿井水灾警报系统 ,用于发出警报,将警报传递给矿井水灾监测中心和机器人控制中枢;
4、所述矿井水灾监测中心,用于接收所述矿井水灾警报系统发出的警报,并对发生矿井水灾地点进行实时监测,将信息发送给矿井水灾警报系统和机器人控制中枢;所述机器人控制中枢,用于接收矿井水灾监测中心发出的指令,所述机器人本体前往发生水灾地点,根据被困人员的定位装置确定位置前往救援;并能够将巷道内的实时情况通过无线信号传递给矿井水灾警报系统和矿井水灾监测中心。
5、进一步的,所述机器人本体包括救援舱、机械手臂、机械腿和影像猎鹰摄像头;所述机械腿通过机械转动轴连接于救援舱下方,形如人体的腿部;所述机械手臂活动连接于救援舱两侧,形如人体的手臂;所述影像猎鹰摄像头设置于救援舱顶部。
6、进一步的,所述救援舱包括一号救援舱、二号救援舱和排水舱;所述一号救援舱外部装有一号舱门,内部装有智能排水阀、传动装置、人员生命体征检测器、水位检测器和二号舱门,所述二号舱门与二号救援舱相连;所述智能排水阀与排水舱连通;所述二号救援舱内部装有智能氧气浓度调节器、温湿调节器、传送带、救生床、智能心脏起搏器和储物柜;所述排水舱设有水舱、接水口和排水阀,其内装有排水泵,所述排水泵包括进水口、排水口、电机以及管道,所述进水口与排水舱内的接水口相连接,排水口与排水舱上的排水阀相连接。
7、进一步的,所号排水舱的前端设置有人体生命体征扫描器,用于判断人体生命体征状态。
8、进一步的,所述机械手臂主要包括大机械臂、小机械臂和末端执行器;所述大机械臂形似人类大臂部,是整个机械臂与机器人主体的连接部分;小机械臂是连接大机械臂和末端执行器的部分;所述小机械臂形如人体的小臂部,所述末端执行器形如人体的手掌。
9、进一步的,所述机械手臂设置有测距仪器、力矩传感器、位置传感器和探照灯,所述测距仪器外部装有防爆抗压保护壳,用于测量机器人与巷道两侧之间的距离;所述力矩传感器用来确保机械手臂的用力精度,把握用力位置;所述位置传感器用来确保械手臂营救被困人员的位置的精确;所述探照灯用于照明。
10、进一步的,所述机械腿主要包括腿部保护壳、大机械腿、机械关节、小机械腿和机械足部,所述腿部保护壳主要用于保护机械腿;所述大机械腿形似人类的大腿部,是整个机械腿与机器人躯干连接部分;所述小机械腿是连接大机械腿和机械足部,形如人体的小腿;所述机械足部形如人体的脚部;机械关节用于连接大机械腿和小机械腿。
11、进一步的,所述影像猎鹰摄像头包括防爆外壳、主摄像头、副摄像头、摄像补光灯;用于将井下实时影像传递到矿井水灾监测中心。
12、进一步的,所述机器人本体还包括机器舱和螺旋推进器;所述螺旋推进器包括桨叶保护壳、桨叶、转动轴系、传动设备和电机,所述电机和传动设备安装到机器舱内;所述桨叶保护壳、桨叶和转动轴系安装在机器舱外面,用于推动机器人前进。
13、进一步的,所述机器人本体前端设置有应力传感器,所述应力传感器用于感应巷道内水压。
14、与现有技术相比,本发明的优点和有益效果为:
15、本发明救援系统通过井水灾警报系统和矿井水灾监测中心的事实检测,能够及时发出警报,并且准确定位事故地点,再有机器人前往事故点及时实施救援,能够快速准确的对人员进行施救,有效的减少矿井损失和人员伤亡,对矿井水灾事故救援的改进具有重大的意义。
技术特征:1.一种采动影响下煤矿突水救援机器人及救援系统,其特征在于,包括矿井水灾警报系统、矿井水灾监测中心、机器人控制中枢和机器人本体,所述矿井水灾警报系统、矿井水灾监测中心和机器人控制中枢之间互为无线信号连接,
2.根据权利要求1所述的一种采动影响下煤矿突水救援机器人及救援系统,其特征在于,所述机器人本体包括救援舱、机械手臂、机械腿和影像猎鹰摄像头;
3.根据权利要求2所述的一种采动影响下煤矿突水救援机器人及救援系统,其特征在于,所述救援舱包括一号救援舱、二号救援舱和排水舱;
4.根据权利要求3所述的一种采动影响下煤矿突水救援机器人及救援系统,其特征在于,所号排水舱的前端设置有人体生命体征扫描器,用于判断人体生命体征状态。
5.根据权利要求2所述的一种采动影响下煤矿突水救援机器人及救援系统,其特征在于,所述机械手臂主要包括大机械臂、小机械臂和末端执行器;
6.根据权利要5所述的一种采动影响下煤矿突水救援机器人及救援系统,其特征在于,所述机械手臂设置有测距仪器、力矩传感器、位置传感器和探照灯,所述测距仪器外部装有防爆抗压保护壳,用于测量机器人与巷道两侧之间的距离;
7.根据权利要求2所述的一种采动影响下煤矿突水救援机器人及救援系统,其特征在于,所述机械腿主要包括腿部保护壳、大机械腿、机械关节、小机械腿和机械足部,所述腿部保护壳主要用于保护机械腿;
8.根据权利要求2所述的一种采动影响下煤矿突水救援机器人及救援系统,其特征在于,所述影像猎鹰摄像头包括防爆外壳、主摄像头、副摄像头、摄像补光灯;用于将井下实时影像传递到矿井水灾监测中心。
9.根据权利要求2所述的一种采动影响下煤矿突水救援机器人及救援系统,其特征在于,所述机器人本体还包括机器舱和螺旋推进器;
10.根据权利要求2所述的一种采动影响下煤矿突水救援机器人及救援系统,其特征在于,所述机器人本体前端设置有应力传感器,所述应力传感器用于感应巷道内水压。
技术总结本发明提供一种采动影响下煤矿突水救援机器人及救援系统,其包括矿井水灾警报系统、矿井水灾监测中心、机器人控制中枢和机器人本体,所述矿井水灾警报系统、矿井水灾监测中心和机器人控制中枢之间为无线信号连接,机器人本体包括救援舱、机械手臂、机械腿和影像猎鹰摄像头,负责前往水灾发生地点进行救援;并能够将巷道内的实时情况通过无线信号传递给矿井水灾监测中心。本发明实现准确定位,及时救援,能够有效的减少矿井损失和人员伤亡,对矿井水灾事故救援的改进具有重大的意义。技术研发人员:李青海,袁树豪,史卫平,张继华,李圣江,孟昭胜,陈存强,张宸硕,赵金海,刘奇受保护的技术使用者:山东科技大学技术研发日:技术公布日:2024/6/20本文地址:https://www.jishuxx.com/zhuanli/20240726/113255.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表