一种高机动性多自由度工作臂的制作方法
- 国知局
- 2024-07-27 10:28:11
本发明属于锚杆钻车,具体涉及一种高机动性多自由度工作臂。
背景技术:
1、在矿山巷道掘进作业中,锚杆、锚索支护是一种快速、安全、经济的巷道支护方式,并得到广泛应用。在巷道掘进完成后,一定时期内易出现片帮、顶板鳞片掉落等情况,需要进行补强支护作业。受限于当前技术发展水平,人工操作仍是主要作业方式。常规的气动锚杆机具作业,需要长距离接水、接气、备料,且作业地点分散,移动频繁。该领域对自动化锚护设备的需求较大。
2、现有自动钻锚作业设备的工作臂,受巷道空间限制,无法同时兼顾行走工况折叠及多工况定位打孔作业时的大范围调整。此外,多工况定位打孔作业需要人工辅助调节,恶劣且狭窄的钻锚作业环境增加了工人的劳动强度、安全风险。
技术实现思路
1、本发明的目的是实现受限巷道空间条件下工作臂大范围旋转、摆动及伸缩调整,适应顶板支护、侧帮支护及打地脚螺栓孔的需要,满足不同工作状态的顶锚、侧锚及地锚的姿态要求。
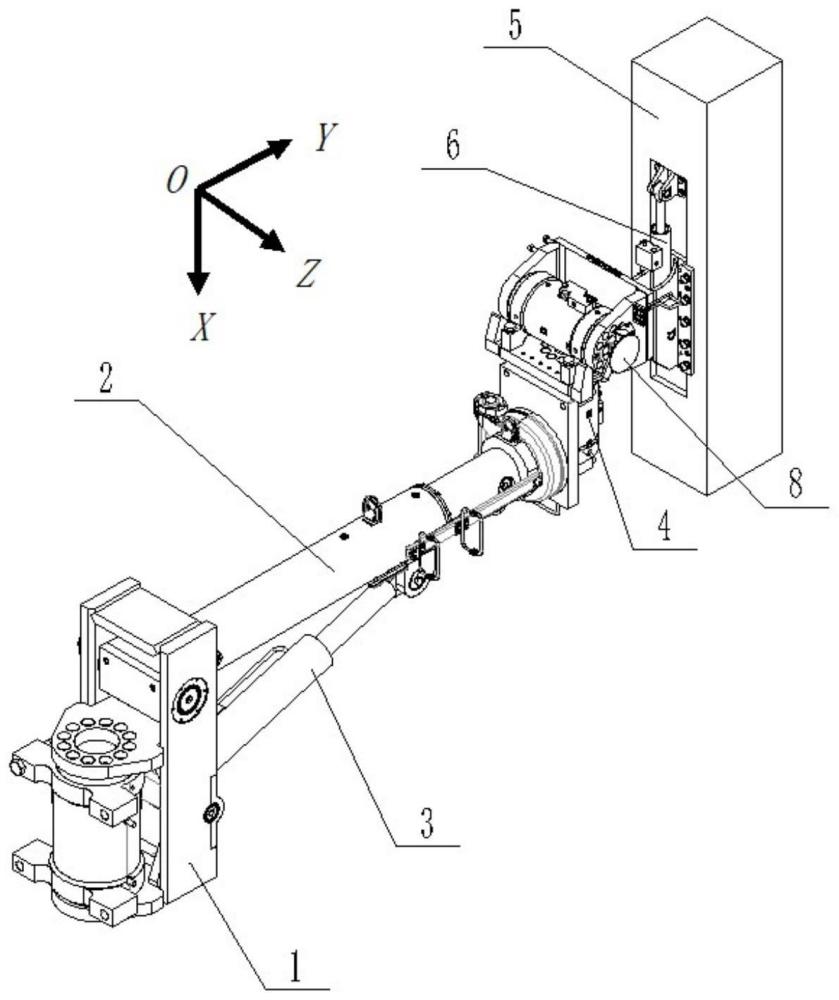
2、本发明提供了如下技术方案:一种高机动性多自由度工作臂,工作臂一端固接于车体、另一端连接自动钻锚模块且相对于车体具有多个运动自由度,多个运动自由度从车体端起至自动钻锚模块端依次是工作臂底座组件的水平左右摆动,伸缩套筒组件的升降、伸缩,调节组件以伸缩套筒组件轴向为中心的周向转动,调节组件的左右、上下摆动,自动钻锚模块在与顶、侧煤壁及底板垂直方向上的移动,多个运动自由度协作配合实现自动钻锚模块始终与顶、侧煤壁及底板保持垂直。
3、进一步地,工作臂底座组件固接于车体,工作臂底座组件的上、下部分别与伸缩套筒组件及升降油缸组件的第一端通过连接轴进行枢接,升降油缸组件的第二端与伸缩套筒组件枢接在一起构成三角形结构;伸缩套筒组件在升降油缸组件的驱动下可完成相对于水平面的举升及压降;
4、调节组件包括回转驱动组件、左右摆动组件和上下调平组件,左右摆动组件与回转驱动组件及上下调平组件相互垂直布置;回转驱动组件固定连接伸缩套筒组件前端,上下调平组件与自动钻锚模块滑移连接;
5、上下调平组件与自动钻锚模块之间连接微调油缸组件,微调油缸组件的活塞杆端与自动钻锚模块固定连接,缸筒与上下调平组件固定连接,驱动微调油缸组件使自动钻锚模块相对于上下调平组件移动。
6、进一步地,工作臂底座组件包括工作臂底座、第一螺旋摆动油缸、第一轴套、第二轴套、压盖、第一限位条和第二限位条;
7、工作臂底座包括两个侧板,两个侧板之间顶端与第一顶板相连、底端与第一底板相连、中间连接第二顶板,两个侧板上相对应设有凹槽和沉槽连接孔;第一竖板垂直设在两侧板之间,顶端与第二顶板垂直相连,底端与第一底板垂直相连;第一螺旋摆动油缸设在第二顶板与第一底板之间,第二顶板与第一轴法兰固定连接,第一底板与第一端盖法兰固定连接,第一螺旋摆动油缸通过第一底脚安装座固定于车体;第一螺旋摆动油缸周向摆动可驱动工作臂底座左右水平方向摆动。
8、进一步地,伸缩套筒组件包括外套筒、内套筒、伸缩油缸组件、第一连接轴、第二连接轴、第三连接轴和第四连接轴;外套筒与内套筒采用间隙配合,外套筒与内套筒、伸缩油缸组件依次相嵌套装;伸缩油缸组件的活塞杆端与内套筒前端通过第二连接轴进行枢接,油缸耳座端与外套筒通过第三连接轴枢接;内套筒在伸缩油缸组件的驱动下,可沿着外套筒的轴线方向前后伸缩移动;外套筒后端通过第一连接轴连接工作臂底座,外套筒前端外周侧设第一耳座,将外套筒与升降油缸组件通过第四连接轴枢接;内套筒的前端连接第二连接部。
9、进一步地,第一连接轴穿过工作臂底座上的两个沉槽连接孔,在沉槽连接孔内套嵌第一轴套,第一轴套的法兰端侧面设有平面,第一限位条贴合于平面并用紧固件固定连接于侧板的内侧面,通过第一限位条限制第一轴套转动;
10、第一连接轴插装在伸缩套筒组件上的第一连接部内,在第一连接部的后端平面上钻设多个贯穿第一连接部和第一连接轴的第一限位通孔,弹性圆柱销穿过第一限位通孔将第一连接部和第一连接轴固定连接,使伸缩套筒组件相对于第一轴套转动,伸缩套筒组件与工作臂底座组件枢接在一起。
11、进一步地,第一竖板与第二顶板连接处设有多个第一筋板,第一竖板与第一底板连接处设有多个第一筋板。
12、进一步地,伸缩套筒组件还包括胶管固定架,胶管固定架包括主体管和数个调节管束器;
13、主体管前端横截面与第二连接部沿内套筒轴线方向的前端面对齐,主体管与第二连接部固定连接,主体管可随内套筒沿着外套筒的轴线方向前后伸缩移动;
14、数个调节管束器沿主体管长度方向间隔布置,调节管束器包括连接平板、下部压环、上部压环和紧固件,下部压环垂直焊接于连接平板厚度方向的顶端表面,下部压环和上部压环相叠固接,固接端设n个连接通孔,n大于等于3;
15、集束胶管穿过下部压环和上部压环相叠固接形成的空间,通过固接不同位置的连接通孔,可调节下部压环与上部压环之间相叠横截面积,从而适应不同数量的集束胶管。
16、进一步地,回转驱动组件与第二连接部沿内套筒轴线方向的连接孔固定连接,左右摆动组件固定连接于回转驱动组件的回转端,左右摆动组件的驱动端与上下调平组件相连接;以伸缩套筒组件与地面平行、顶锚工况为参照,以第一螺旋摆动油缸的转动中心为原点建立世界坐标系,回转驱动组件可完成xoz平面内的周向转动,左右摆动组件可完成yoz平面内的周向转动,上下调平组件可完成xoy平面内的周向转动。
17、进一步地,还包括第一传感器组件,第一传感器组件包括第一编码器、第一罩壳和第二罩壳;沉槽连接孔的沉槽深度与第一罩壳的法兰厚度一致,沉槽面设多个连接孔,第一罩壳压入其中一个沉槽连接孔与工作臂底座的侧板固定连接;第一编码器安装于第一罩壳的顶部,第二罩壳遮盖住第一旋转编码器;
18、第一编码器的输入轴端与第一连接轴通过柔性联轴器进行联接,第一编码器随第一连接轴转动,测量伸缩套筒组件的转动角度。
19、进一步地,还包括第二传感器组件,第二传感器组件包括第二编码器、第三罩壳和第二编码器安装板;第二编码器安装板为l型结构,一端固定连接于上下调平组件驱动元件的外壳体,另一端用于安装第二编码器;第三罩壳固定上下调平座的侧板;第二编码器的输入轴通过柔性联轴器与上下调平组件驱动元件的输出轴联接,测量上下调平组件的转动角度。
20、与现有技术相比,本发明的优势在于:
21、1.多自由度工作臂结构紧凑、工况适应性强、工作范围广,具备多个自由度的运转能力,关节转动灵活,能够满足自动锚钻模块在行走工况及钻锚工况下的不同姿态要求。
22、2.多自由度工作臂具备三级调整定位机制。第一级为粗调整,包括工作臂底座组件的水平左右摆动,伸缩套筒组件的升降、伸缩;第二级为精调整,包括自动钻锚模块绕回转驱动中心的周向转动,调节组件的左右、上下摆动;通过第一、二级调整,可实现自动钻锚模块始终与顶、侧煤壁保持垂直;第三级为微调整,主要为自动钻锚模块在与顶、侧煤壁及底板垂直方向上的移动。多自由度工作臂通过三级调整定位机制并结合控制理论,可准确定位需设锚杆位置。
23、3.多自由度工作臂在多个关节点配置高灵敏度传感器,如,第一旋转编码器组件和第二旋转编码器组件。实时监测空间位置,利用数字化程序控制工作臂的移动,远程操作遥控器可实现“一键”折叠和“一键”展开工作臂,大大提高了设备对低矮巷道的适应性及施工作业效率。
24、4.将该多自由度工作臂应用到自动钻锚设备中,可显著提高自动钻锚设备的自动化程度及作业机动性,在一定程度上优化锚杆支护工艺,有助于推动巷道锚杆支护的智能化建设,降低了作业劳动强度。
本文地址:https://www.jishuxx.com/zhuanli/20240726/113466.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。