-
一种高机动性微型自主水下机器人
本发明属于水下机器人,特别涉及一种高机动性微型自主水下机器人。背景技术:1、随着自主水下机器人(autonomous underwater veh i c l es,auv)技术的进步,其应用领域不断......
-
高机动性FPV破窗无人机的制作方法
本技术涉及无人机,具体地说,涉及高机动性fpv破窗无人机。背景技术:1、无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,......
-
一种多模态全栖高机动性机器人
本发明涉及机器人,特别涉及一种多模态全栖高机动性机器人。背景技术:1、在实现本发明过程中,发明人发现现有技术中至少存在如下问题,目前,在小型勘测机器人领域,当前阶段仍然面临一些技术和操作上的问题,某些......
-
一种高机动性车顶无人机场的制作方法
本发明涉及无人机场,具体为一种高机动性车顶无人机场。背景技术:1、无人机巡检,无人机森林防火,无人打农药,无人机摄像等需要无人机应用的场景,在前期都是人工去维护,可是人工维护效率低成本高机动性差,由此......
-
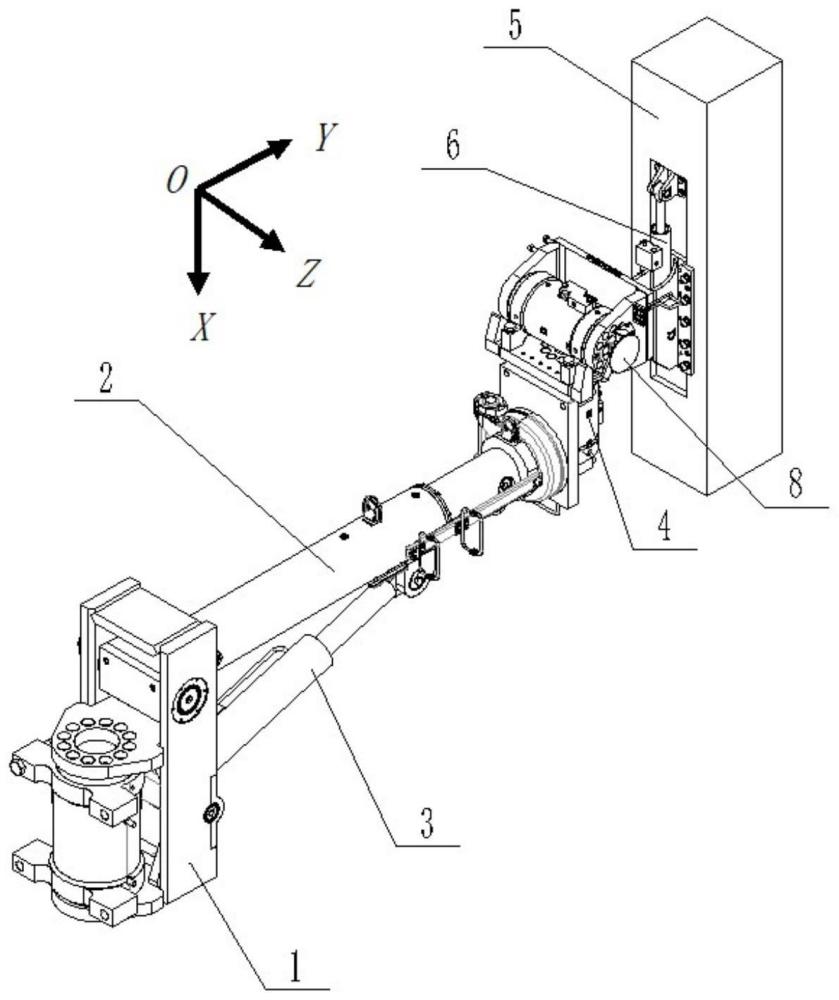
一种高机动性多自由度工作臂的制作方法
本发明属于锚杆钻车,具体涉及一种高机动性多自由度工作臂。背景技术:1、在矿山巷道掘进作业中,锚杆、锚索支护是一种快速、安全、经济的巷道支护方式,并得到广泛应用。在巷道掘进完成后,一定时期内易出现片帮、......
-
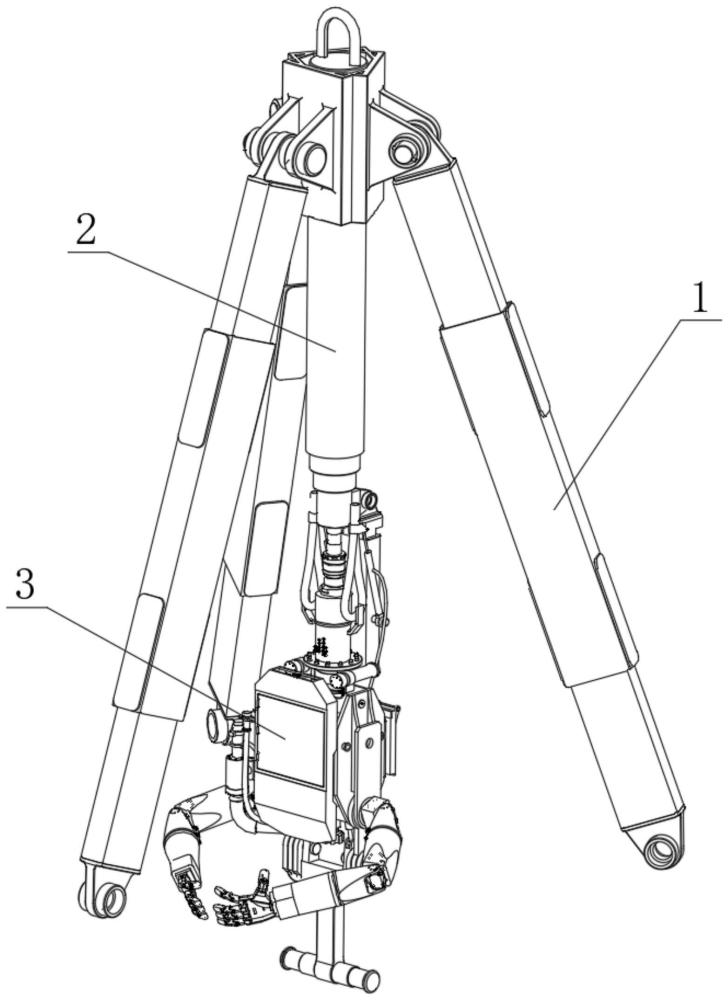
一种高机动性深井救援机器人
本申请涉及深井救援,具体涉及一种高机动性深井救援机器人。背景技术:1、井下救援是一类常见的消防部队抢险救援任务,深井救援难度大,成本高,过程繁琐复杂,平均耗时要数10小时以上,落井人员存活率很低,还有......
技术新讯 > 机动性 > 列表
 2024-08-01
2024-08-01精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -
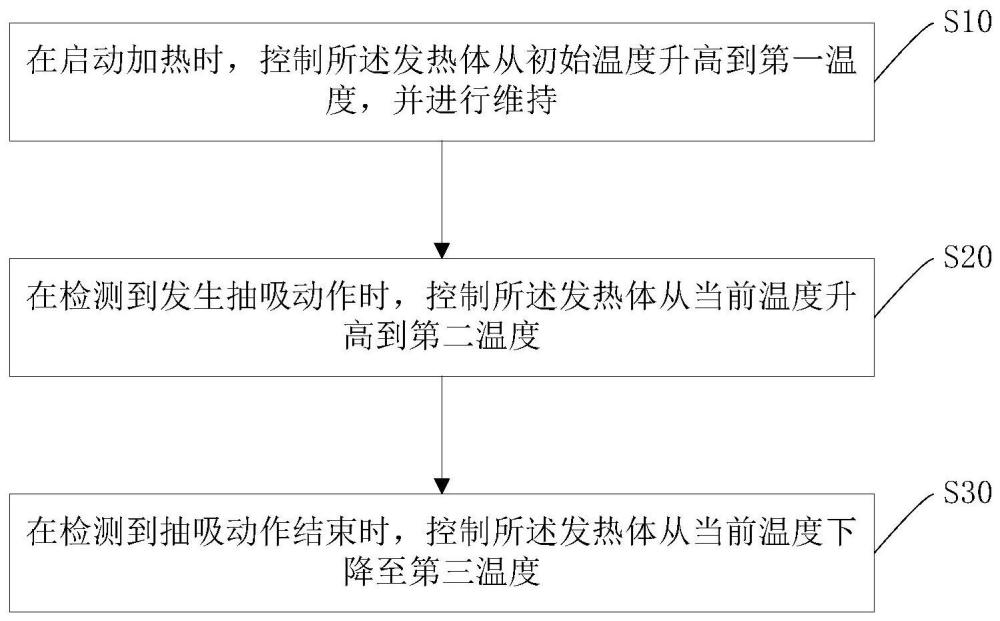
发热体、加热不燃烧装置及其加热控制方法与流程
2024-11-19 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01