一种小直径超小转弯半径掘进装备的制作方法
- 国知局
- 2024-07-27 10:57:17
本发明涉及隧道掘进机,具体涉及一种小直径超小转弯半径掘进装备。
背景技术:
1、隧道掘进机(tbm)是用机械破碎岩石、出碴和支护实行连续作业的一种综合设备。按掘进机在工作面上的切削过程,分为全断面掘进机和部分断面掘进机。按破碎岩石原理不同,又可分滚压式(盘形滚刀)掘进机和铣切式掘进机。滚压式全断面掘进机适于中硬岩至硬岩。铣切式掘进机适用于煤层及软岩中。在推进油缸的轴向压力作用下,电动机驱动滚刀盘旋转,将岩石切压破碎。
2、近年来,抽水蓄能电站开启了小端面大曲率tbm排水廊道非开挖技术应用性生产研究,斜井tbm及竖井sbm施工技术也在开始探索试验,小断面tbm施工,有效地改善了排水洞、电缆井及试验洞等辅助洞室在传统钻爆施工下的夹持作用效率低、施工环境差、安全风险高等问题。
3、小直径超小转弯半径排水廊道具有掘进区间短、线路曲线小、频繁过站、场地环境受限等工程特点,按照原tbm系统的设计已经不再具有适用性,极易发生工程事故,因此亟需研发和改进可实现小直径超小转弯半径掘进装备,考虑超小转弯半径施工的整机适应性、tbm调向、设备通过能力,以满足整机小半径转弯快速智能掘进的性能要求。
技术实现思路
1、基于背景技术存在的问题,本发明目的在于提供一种小直径超小转弯半径掘进装备,以解决现有技术中存在的小直径超小转弯半径排水廊道掘进区间短、线路曲线小、频繁过站、场地环境受限的问题。
2、本发明通过下述技术方案实现:
3、本发明提供一种小直径超小转弯半径掘进装备,包括盾体和用于控制盾体姿态的刀盘转弯控制系统,所述盾体包括前盾和后盾,且所述前盾和后盾之间铰接安装有呈v字排列的推进油缸组件,所述推进油缸组件用于连接前盾和后盾并控制前盾转弯角度;所述刀盘转弯控制系统包括刀盘位姿测算单元和刀盘转弯控制单元。
4、进一步的,所述前盾一侧还设置有刀盘,所述刀盘底部为沿刀盘向前盾向上倾斜的倾斜面。
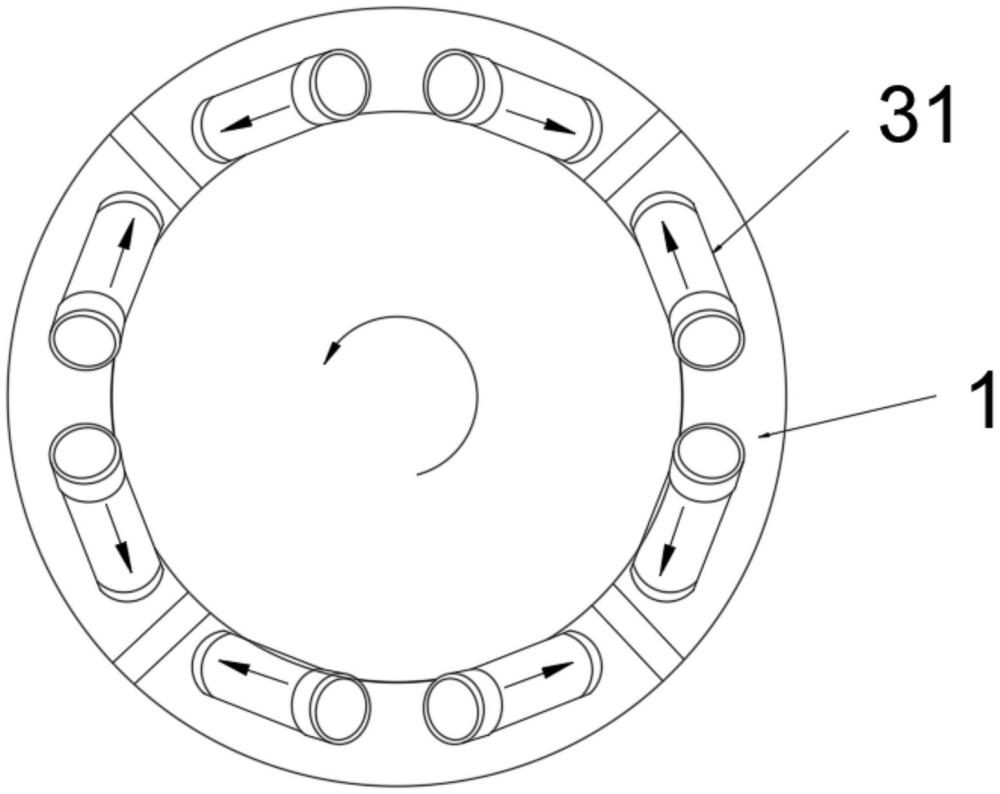
5、进一步的,所述推进油缸组件包括多个推进油缸,多个所述推进油缸呈环形阵列均匀设置在所述前盾和所述后盾之间,且相邻的两个所述推进油缸呈v字排列。
6、进一步的,若干所述推进油缸分为四个分区,每个分区设置有两个所述推进油缸,单个分区内的两个所述推进油缸呈倒v字,两个所述推进油缸在所述前盾端相互远离。
7、进一步的,所述推进油缸采用流量和液压双重液压系统控制,用于控制分区油缸行程差实现盾体小转弯。
8、进一步的,所述刀盘位姿测算单元用于实时获取并处理刀盘在掘进过程中的空间位置和姿态数据;
9、所述刀盘转弯控制单元基于刀盘位姿测算单元提供的数据,执行相应的控制策略以调整刀盘姿态和位置。
10、进一步的,所述刀盘位姿测算单元包括传感器检测模块、数据采集模块和数据融合模块;
11、其中,所述传感器检测模块包括激光导向系统、惯性导航系统、倾角传感器和距离传感器;
12、所述数据采集模块用于收集各传感器输出的原始信号,并进行预处理;
13、所述数据融合模块基于卡尔曼滤波算法将来自不同传感器的数据进行融合处理,并根据融合后的数据计算得到刀盘的三维坐标和姿态角。
14、进一步的,所述刀盘转弯控制单元包括姿态控制模块、液压控制模块和执行驱动模块;
15、其中,所述姿态控制模块基于姿态控制算法和位置控制算法,计算推进油缸的推力调整方案,以调整盾构机的前后、左右倾斜角度;
16、所述液压控制模块包括流量控制模块和压力控制模块;
17、其中,所述流量控制模块用于调整油缸伸缩速度,确保刀盘姿态调整的同步性和稳定性,所述压力控制模块确保油缸在各种工况下都能提供足够的推力;
18、所述执行驱动模块用于接收姿态控制模块的指令,驱动执行元件,调整推进油缸的动作,实现刀盘的转弯控制。
19、进一步的,所述姿态控制算法具体为:
20、对于每个姿态角,采用独立的pid控制器,其中,pid控制器具体表达式为:
21、
22、式中,δli表示第i个接油缸需要调整的行程差;kp表示比例控制系数;ki表示积分控制系数;kd表示微分控制系数;ei表示当前姿态角与目标姿态角的误差;∫eidt表示累积误差;表示误差的变化率;
23、并引入非线性补偿函数f(·)改善控制性能,将指数函数作为非线性补偿函数代入原控制方程,得到修正后的铰接油缸行程差计算公式:
24、
25、进一步的,所述位置控制算法具体为:
26、刀盘当前位置向量为p=(x,y,z),轴线上的目标点位置向量为t=(xt,yt,zt),目标点位置向量与刀盘当前位置向量的二维横向偏离向量为d=(δx,δy),即d=p-(xt,yt,z),则推进油缸的推力为:
27、f=kp*||d||+fc;
28、式中,kp表示偏离单位长度所应施加的推力;‖d‖表示当前偏离向量的欧几里得范数,即偏离距离;fc表示维持正常掘进所需的恒定基础推力。
29、本发明与现有技术相比,具有如下的优点和有益效果:
30、(1)本发明中的小直径超小转弯半径快速智能掘进装备中,采用v字排列的推进油缸,利用油缸夹角产生分力抵消刀盘扭矩,节省盾体空间实现小转弯,v字型排列的推进油缸沿圆周均匀分布,形成对称的力矩作用,使得在转弯时产生的弯矩均匀分布到整个铰接结构上,避免局部应力过于集中,有利于提高结构的稳定性和耐用性;
31、(2)本发明中的小直径超小转弯半径快速智能掘进装备中,通过在姿态控制算法引入非线性补偿函数f(·)改善控制性能,弥补传统pid控制器在处理非线性系统时可能存在的稳态误差大、超调严重、抗干扰能力弱等问题;使用指数函数补偿后,可以改善系统的静态误差、动态响应特性以及对扰动的抑制能力,可以有效地应对盾构机的非线性特性,提升姿态控制的精度、动态响应、鲁棒性和系统设计的简便性。
技术特征:1.一种小直径超小转弯半径掘进装备,包括盾体和用于控制盾体姿态的刀盘转弯控制系统,其特征在于,所述盾体包括前盾(1)和后盾(2),且所述前盾(1)和后盾(2)之间铰接安装有呈v字排列的推进油缸组件(3),所述推进油缸组件(3)用于连接前盾(1)和后盾(2)并控制前盾(1)转弯角度;所述刀盘转弯控制系统包括刀盘位姿测算单元(5)和刀盘转弯控制单元(6)。
2.根据权利要求1所述的一种小直径超小转弯半径掘进装备,其特征在于,所述前盾(1)一侧还设置有刀盘(4),所述刀盘(4)底部为沿刀盘(4)向前盾(1)向上倾斜的倾斜面。
3.根据权利要求1所述的一种小直径超小转弯半径掘进装备,其特征在于,所述推进油缸组件(3)包括多个推进油缸(31),多个所述推进油缸(31)呈环形阵列均匀设置在所述前盾(1)和所述后盾(2)之间,且相邻的两个所述推进油缸(31)呈v字排列。
4.根据权利要求3所述的一种小直径超小转弯半径掘进装备,其特征在于,若干所述推进油缸(31)分为四个分区,每个分区设置有两个所述推进油缸(31),单个分区内的两个所述推进油缸(31)呈倒v字,两个所述推进油缸(31)在所述前盾(1)端相互远离。
5.根据权利要求1所述的一种小直径超小转弯半径掘进装备,其特征在于,所述推进油缸(31)采用流量和液压双重液压系统控制,用于控制分区油缸行程差实现盾体小转弯。
6.根据权利要求1所述的一种小直径超小转弯半径掘进装备,其特征在于,所述刀盘位姿测算单元(5)用于实时获取并处理刀盘(4)在掘进过程中的空间位置和姿态数据;
7.根据权利要求1或6所述的一种小直径超小转弯半径掘进装备,其特征在于,所述刀盘位姿测算单元(5)包括传感器检测模块(51)、数据采集模块(52)和数据融合模块(53);
8.根据权利要求1或6所述的一种小直径超小转弯半径掘进装备,其特征在于,所述刀盘转弯控制单元(6)包括姿态控制模块(61)、液压控制模块(62)和执行驱动模块(63);
9.根据权利要求8所述的一种小直径超小转弯半径掘进装备,其特征在于,所述姿态控制算法具体为:
10.根据权利要求8所述的一种小直径超小转弯半径掘进装备,其特征在于,所述位置控制算法具体为:
技术总结本发明公开了一种小直径超小转弯半径掘进装备,涉及隧道掘进机技术领域,包括盾体和用于控制盾体姿态的刀盘转弯控制系统,盾体包括前盾和后盾,且前盾和后盾之间铰接安装有呈V字排列的推进油缸组件,推进油缸组件用于连接前盾和后盾并控制前盾转弯角度;刀盘转弯控制系统包括刀盘位姿测算单元和刀盘转弯控制单元。采用V字排列的推进油缸,利用油缸夹角产生分力抵消刀盘扭矩,节省盾体空间实现小转弯,V字型排列的推进油缸沿圆周均匀分布,形成对称的力矩作用,使得在转弯时产生的弯矩均匀分布到整个铰接结构上,避免局部应力过于集中,有利于提高结构的稳定性和耐用性。技术研发人员:赵云飞,王胜,吴高见,徐炳生,李秋石,唐平康,苏军安,朱静萍,葛静,肖瑞,郝利军,杨平,王斌,吴桌盼,任健受保护的技术使用者:中国水利水电第五工程局有限公司技术研发日:技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240726/116668.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表