一种刮刀收集系统的制作方法
- 国知局
- 2024-07-27 11:46:26
本技术涉及一种刮刀收集系统,更具体地说,它涉及一种电解提取反应后阴极上附集的提取物收集专用刮刀系统。
背景技术:
1、由于高纯金属具备高纯净度的特点,其物化性能优异,往往被应用于高精尖产品的制造。然而在自然界中,很多金属是以化合物形式存在的,需要通过高温提纯装置来提取有用的金属。
2、熔盐电解精炼方法作为一种常用的高纯金属材料制备方法,其精炼过程一般需要在高温和真空(或惰性气体保护)条件下进行,精炼过程结束后,先将附着高纯金属的阴极棒或阴极板从高温熔盐中提出,经过冷却后,从真空(或惰性气体保护)环境中取出,之后,以手工刮除方式将阴极杆上附着的粉体状、颗粒状或枝晶状的高纯金属刮除并收集起来,上述手工刮除方式效率低。
3、上述过程中,由于高纯金属的刮除和收集均暴露于大气环境中,因此空气中的氧、灰尘及水份等成分会对精炼出的高纯金属产品造成氧化和污染,且,制备出的高纯金属须先经过长时间冷却过程,生产连续性差且生产效率低。
技术实现思路
1、鉴于上述的分析,本实用新型旨在提供一种刮刀收集系统,用以解决现有高纯金属刮刀收集装置效率低,暴露在空气中容易被氧化和污染的问题。
2、本实用新型的目的主要是通过以下技术方案实现的:
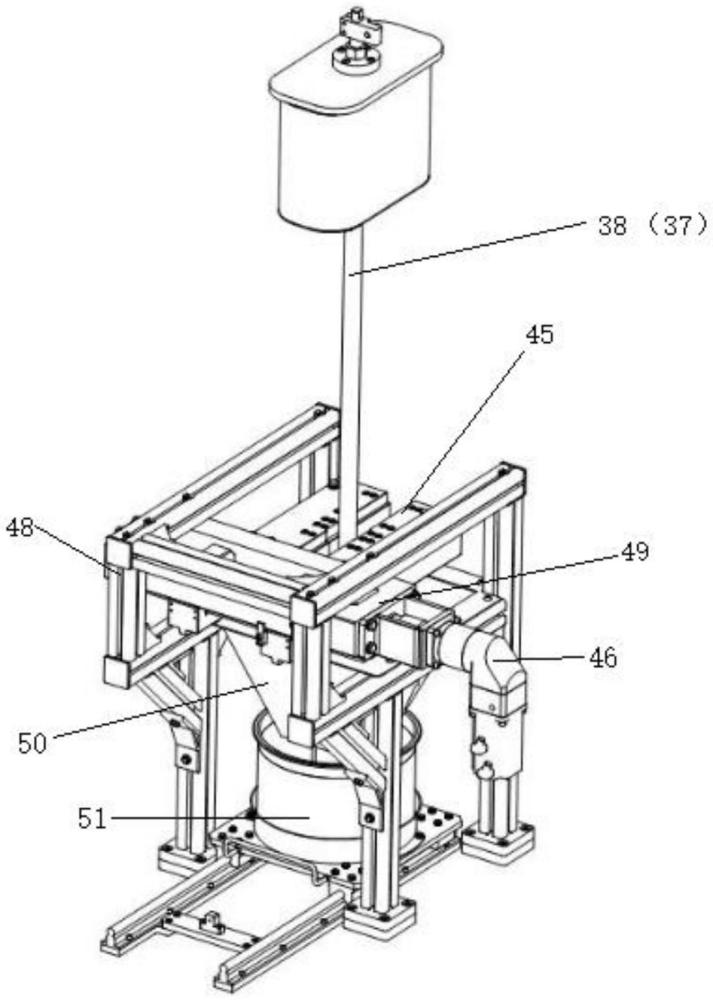
3、一种刮刀收集系统,所述系统包括:刮刀收集装置和阴极运动模组;所述刮刀收集装置包括:刮刀运动组件、刮刀架、刮刀、导料筒、枝晶收集罐;所述刮刀置于刮刀架上;导料筒位于刮刀架正下方;枝晶收集罐位于导料筒正下方;所述刮刀运动组件带动刮刀架做开合运动;当刮刀架打开时,阴极运动模组带动待刮取的阴极组件插入刮刀架之间,或者阴极运动模组带动刮取后的阴极组件移出刮刀架;当刮刀架闭合时,阴极运动模组带动阴极组件上下运动,位于刮刀架上的刮刀可刮去阴极组件上的枝晶,枝晶通过导料筒掉落在枝晶收集罐内。
4、进一步的,所述刮刀运动组件包括燕尾槽托板、伺服电机、正反向梯形丝杠;伺服电机安装在燕尾槽托板的燕尾处,带动正反向梯形丝杠旋转运动;正反向梯形丝杠位于燕尾槽托板内部。
5、进一步的,所述刮刀架包括两个相同的刮刀部件,两个刮刀部件在水平方向相对运动实现刮刀架的开合。
6、进一步的,所述正反向梯形丝杠上有两段螺纹旋向相反的丝杠,两段螺纹旋向相反的丝杠上分别配置有螺纹旋向相反的螺母,两个螺母各连接有一个滑块,两个滑块分别与刮刀架的两个刮刀部件相连。
7、进一步的,所述燕尾槽托板侧面安装有限位块和限位传感器,所述限位块用于控制刮刀架开启的极限位置。
8、进一步的,所述系统还包括刮刀支架,所述刮刀支架包括上下两部分支架,上部分支架用于支撑刮刀运动组件、刮刀架;导料筒固定在上部分支架底部,下部分支架用于支撑枝晶收集罐。
9、进一步的,所述系统还包括可编程逻辑控制器plc;当刮刀架打开过程中,限位传感器检测到限位块时,将检测到限位块信号反馈给plc,plc控制伺服电机停止运动。
10、进一步的,所述阴极运动模组包括安装底板、垂直伺服电机、水平伺服电机、直线模组、旋转平台;
11、所述直线模组包括滚珠丝杆和双直线导轨、阴极连接座;双直线导轨分为水平直线导轨和垂直直线导轨;所述水平直线导轨固定在安装底板之上,水平直线导轨中布置有滚珠丝杆,旋转平台安装在水平直线导轨上的滚珠丝杠上,滚珠丝杠带动旋转平台水平运动;旋转平台上安装有垂直直线导轨,垂直直线导轨中布置有滚珠丝杆,阴极连接座连接到垂直直线导轨的滚珠丝杆上;
12、所述垂直伺服电机位于垂直直线导轨滚珠丝杆的一端,用于带动阴极连接座的垂直运动;水平伺服电机带动阴极组件运动到刮刀架开口内。
13、进一步的,所述阴极运动模组还包括水平位置传感器和垂直位置传感器;所述水平位置传感器安装在旋转平台上;所述垂直位置传感器安装到阴极连接座上;所述水平位置传感器和垂直位置传感器用于向plc反馈阴极组件所处的位置,plc根据接收到的位置信息通过控制水平伺服电机、垂直伺服电机运动状态来控制阴极组件的运动。
14、进一步的,所述系统还包括手套箱,所述刮刀收集装置、阴极运动模组置于手套箱体内部;所述手套箱中充入氩气,用于枝晶收集过程中隔绝空气。
15、与现有技术相比,本实用新型至少可实现如下有益效果之一:
16、1、本实用新型的一种刮刀收集系统,能够实现一种全自动的刮刀收集系统,省去人工操作,不必等冷却之后进行操作,提高了效率。
17、2、本实用新型的一种刮刀收集系统,集成了阴极运动模组,能够和刮刀收集部分配合工作,提高了自动化程度。
18、3、本实用新型在手套箱中充入氩气,反应环境不易氧化。
19、本实用新型中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本实用新型的其他特征和优点将在随后的内容中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本实用新型而了解。本实用新型的目的和其他优点可通过文字以及附图中所特别指出的内容中来实现和获得。
技术特征:1.一种刮刀收集系统,其特征在于,所述系统包括:刮刀收集装置和阴极运动模组;所述刮刀收集装置包括:刮刀运动组件、刮刀架、刮刀、导料筒、枝晶收集罐;所述刮刀置于刮刀架上;导料筒位于刮刀架正下方;枝晶收集罐位于导料筒正下方;所述刮刀运动组件带动刮刀架做开合运动;当刮刀架打开时,阴极运动模组带动待刮取的阴极组件插入刮刀架之间,或者阴极运动模组带动刮取后的阴极组件移出刮刀架;当刮刀架闭合时,阴极运动模组带动阴极组件上下运动,位于刮刀架上的刮刀可刮去阴极组件上的枝晶,枝晶通过导料筒掉落在枝晶收集罐内。
2.根据权利要求1所述的刮刀收集系统,其特征在于,所述刮刀运动组件包括燕尾槽托板、伺服电机、正反向梯形丝杠;伺服电机安装在燕尾槽托板的燕尾处,带动正反向梯形丝杠旋转运动;正反向梯形丝杠位于燕尾槽托板内部。
3.根据权利要求1所述的刮刀收集系统,其特征在于,所述刮刀架包括两个相同的刮刀部件,两个刮刀部件在水平方向相对运动实现刮刀架的开合。
4.根据权利要求2所述的刮刀收集系统,其特征在于,所述正反向梯形丝杠上有两段螺纹旋向相反的丝杠,两段螺纹旋向相反的丝杠上分别配置有螺纹旋向相反的螺母,两个螺母各连接有一个滑块,两个滑块分别与刮刀架的两个刮刀部件相连。
5.根据权利要求2所述的刮刀收集系统,其特征在于,所述燕尾槽托板侧面安装有限位块和限位传感器,所述限位块用于控制刮刀架开启的极限位置。
6.根据权利要求1所述的刮刀收集系统,其特征在于,所述系统还包括刮刀支架,所述刮刀支架包括上下两部分支架,上部分支架用于支撑刮刀运动组件、刮刀架;导料筒固定在上部分支架底部,下部分支架用于支撑枝晶收集罐。
7.根据权利要求5所述的刮刀收集系统,其特征在于,所述系统还包括可编程逻辑控制器plc;当刮刀架打开过程中,限位传感器检测到限位块时,将检测到限位块信号反馈给plc,plc控制伺服电机停止运动。
8.根据权利要求1所述的刮刀收集系统,其特征在于,所述阴极运动模组包括安装底板、垂直伺服电机、水平伺服电机、直线模组、旋转平台;
9.根据权利要求8所述的刮刀收集系统,其特征在于,所述阴极运动模组还包括水平位置传感器和垂直位置传感器;所述水平位置传感器安装在旋转平台上;所述垂直位置传感器安装到阴极连接座上;所述水平位置传感器和垂直位置传感器用于向plc反馈阴极组件所处的位置,plc根据接收到的位置信息通过控制水平伺服电机、垂直伺服电机运动状态来控制阴极组件的运动。
10.根据权利要求1所述的刮刀收集系统,其特征在于,所述系统还包括手套箱,所述刮刀收集装置、阴极运动模组置于手套箱体内部;所述手套箱中充入氩气,用于枝晶收集过程中隔绝空气。
技术总结本技术涉及一种刮刀收集系统,解决了现有技术中刮刀收集系统效率低,暴露在空气中容易被氧化和污染的问题。所述系统包括:刮刀收集装置和阴极运动模组;所述刮刀收集装置包括:刮刀运动组件、刮刀架、刮刀、导料筒、枝晶收集罐;所述刮刀置于刮刀架上;导料筒位于刮刀架正下方;枝晶收集罐位于导料筒正下方;所述刮刀运动组件带动刮刀架做开合运动;当刮刀架打开时,阴极运动模组带动待刮取的阴极组件插入刮刀架之间,或者阴极运动模组带动刮取后的阴极组件移出刮刀架;当刮刀架闭合时,阴极运动模组带动阴极组件上下运动,位于刮刀架上的刮刀可刮去阴极组件上的枝晶,枝晶通过导料筒掉落在枝晶收集罐内。实现了一种高效的刮刀收集系统。技术研发人员:刘丁洋,李倩,曹英荣,刘通,王伟奇,李依帆受保护的技术使用者:北京星航机电装备有限公司技术研发日:20231106技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240726/119470.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种新型混液槽的制作方法
下一篇
返回列表