用于组装和/或拆卸制氢设施的碱性电解槽单元的方法与流程
- 国知局
- 2024-07-27 12:09:41
本发明一般涉及一种用于组装和/或拆卸制氢设施的碱性电解槽单元的工业机器人系统。本发明更具体地涉及一种用于组装和/或拆卸制氢设施的碱性电解槽单元的方法以及包括工业机器人系统的制氢设施。
背景技术:
1、随着越来越多的国家追求脱碳战略,氢气作为能源运输工具很可能会变得更加重要。氢气的使用与直接电气化面临挑战的行业尤其相关,例如钢铁和某些化学品的制造、长途运输、航运和航空业。优选地,所产生的氢气具有低碳足迹,并且最终是绿色的,例如通过使用来自可再生资源的电力电解水来产生。除了法规和市场设计之外,制氢的成本仍然是一个障碍。
2、电解槽或水电解槽是电化学设备,用于通过电流将水分子分解为氢气和氧气。电解槽包括发生电化学过程的电解槽电池。电解槽电池通常由浸在液体电解质中或与固体电解质相邻的两个电极(阳极和阴极)以及促进反应物运输和产物移除的膜或其它多孔运输层组成。在电极处,水被分解为氧气和氢气,其中离子(通常为h+或oh-)穿过液体或固体膜电解质。两个电极之间的膜还负责保持所产生的气体(氢气和氧气)分离并且避免气体混合。
3、电解槽通常包括多个这种电解槽电池,该电解槽电池被布置在电池堆中,并且被布置在提供机械支撑件的两个端板之间。电池堆还可以包括作为电解槽电池中两个相对电极之间的绝缘材料的隔离件、密封件和用于进一步机械支撑的框架。此外,多个电解槽单元可以被布置在电解槽系统中,该电解槽系统包括用于冷却、处理氢气(例如,用于纯化和压缩)、转换电力输入(例如,变压器和整流器)、处理供水(例如,去离子)和气体输出(例如,氧气)的器具。这种电解槽系统可以例如被包括在制氢设施中。
4、电解槽通常基于电解质和操作的温度而分为不同的技术。例如,碱性电解槽使用液体碱性电解质,而质子交换膜(pem)电解槽使用固体聚合物电解质,并且固体氧化物电解槽(soec)使用固体陶瓷材料作为电解质。
5、所有类型的电解槽均具有生产氢气的相对高的成本。然而,相对于通常用于pem的铂族金属基催化剂,碱性电解槽通常与更便宜的催化剂相关联。此外,由于可交换的电解质和阳极催化剂的较低溶解,碱性电解槽通常具有较高的耐久性。此外,由于碱性电解液中较低的气体扩散率,碱性电解槽通常实现较高的气体纯度。
6、然而,仍然存在与电解槽相关联的挑战,并且特别是对于包括多个电解槽单元的制氢设施。电解槽单元的组装是耗时的,并且通常需要重型起重装备和庞大的运输设施。此外,由于对于人员而言的环境危险甚至危害,当其它电解槽单元在操作中时,拆卸电解槽单元(例如进行维护)具有挑战性。此外,由于电解槽单元相对庞大,因此安装的每单位表面面积的制氢容量相对较低。因此,工业中需要进一步的改进。
技术实现思路
1、本发明的目的是克服上述问题中的至少一些问题,并且提供制氢设施的碱性电解槽单元的组装和/或拆卸方面的改进。这一目标以及下文中将显而易见的其它目标是借助于一种用于组装和/或拆卸制氢设施的碱性电解槽单元的方法、一种用于组装和/或拆卸制氢设施的碱性电解槽单元的工业机器人系统以及一种包括这种工业机器人系统的制氢设施来实现的。
2、根据本发明的第一方面,提供了一种用于组装和/或拆卸制氢设施的碱性电解槽单元的方法,该制氢设施被容纳在具有受控室内环境的建筑物中。该方法包括:
3、提供工业机器人系统,该工业机器人系统包括具有机器人功能性的控制器和多个机器人,每个机器人包括具有基座的操纵器和可借助于操纵器相对于基座围绕多个轴线移动的工具,
4、将多个机器人运输到多个电解槽单元场地,
5、提供碱性电解槽单元部件,该碱性电解槽单元部件至少包括多个电解槽电极和多个电解槽膜,
6、通过多个机器人执行被包括在控制器中的组装指令,在电解槽单元场地处组装碱性电解槽单元,其中组装包括:对于每个被组装的碱性电解槽单元,借助于至少一个机器人的工具和操纵器将多个电解槽电极和多个电解槽膜布置在形成电池堆的电解槽电池中,和/或
7、通过多个机器人中的至少一个机器人执行被包括在控制器中的拆卸指令,在电解槽单元场地处拆卸碱性电解槽单元中的至少一个碱性电解槽单元,其中拆卸包括:对于每个被拆卸的碱性电解槽单元,借助于至少一个机器人的工具和操纵器移除至少一个碱性电解槽单元部件。
8、由此,提供了一种组装和/或拆卸制氢设施的碱性电解槽单元的有效方法。因此,可以借助于机器人辅助组装碱性电解槽单元来有效地构建制氢设施或者制氢设施的至少一部分。附加地或备选地,可以借助于机器人辅助拆卸碱性电解槽单元来有效地实现维护或停运。因此,不需要手动组装和/或拆卸碱性电解槽单元或者至少减少了这种需求。由此,减少了人员驻扎在电解槽单元场地处的需求。
9、通过提供如上所述的由机器人辅助组装和/或拆卸制氢设施的碱性电解槽单元,制氢设施中可以省去重型起重装备和庞大的运输设施。此外,由于碱性电解槽单元的组装和/或拆卸是在制氢设施(即现场)处进行的,因此可以将繁琐的运输最小化,因为碱性电解槽单元部件可以被运输到制氢设施,而不是已经(场外)组装的碱性电解槽单元。因此,制氢设施的构造得到简化。此外,由于碱性电解槽单元不是在场外而是在现场组装和/或拆卸的,因此可以简化鉴定和测试。此外,通过本发明的方法,可以基于制氢设施的总容量的期望需求,使用相同的工业机器人系统来扩大或缩小制氢设施的规模,该规模至少基于碱性电解槽单元的数目。用于组装和/或拆卸制氢设施的碱性电解槽单元的方法可以被称为现场组装和/或现场拆卸制氢设施的碱性电解槽单元。
10、通常,将多个机器人运输到多个电解槽单元场地是通过将机器人中的至少一个机器人运输到电解槽单元场地中的至少一个电解槽单元场地来进行的。因此,工业机器人系统的不同机器人被运输到不同的电解槽单元场地。然而,不需要每个电解槽单元场地都有一个机器人,而是可以在建筑物中运输机器人,并且一旦机器人完成了碱性电解槽单元的组装,所述机器人就可以被运输到另一个电解槽单元场地并且组装另一个碱性电解槽单元。
11、根据至少一个示例实施例,建筑物和/或工业机器人系统包括用于将多个机器人运输到多个电解槽单元场地的引导系统。根据至少一个示例实施例,引导系统是被容纳在建筑物内的轨道系统,其中多个机器人被配置为在轨道系统上被运输。因此,多个机器人被配置为在轨道系统上被运输到多个电解槽单元场地。例如,例如通过被分成不同的轨道部分,轨道系统被集成到建筑物的地板中。根据至少一个示例实施例,引导系统通过自主移动机器人功能性而被包括在工业机器人系统中。因此,多个机器人中的每一个机器人都是自主移动机器人(amr),其被配置为通过定位信息在建筑物内部移动。根据至少一个示例实施例,控制器包括指令,该指令包括针对每个机器人的定位信息。因此,指使每个机器人(自主地或在轨道系统上)移动到(通常对应于电解槽单元场地的)预定位置,用于实行碱性电解槽单元的组装和/或拆卸。
12、应当注意,电解槽单元场地是碱性电解槽单元的场地,或者是碱性电解槽单元的组装场地。因此,术语电解槽单元场地包括预期的电解槽单元场地,即预期用于组装碱性电解槽单元的场地,并且包括实际的电解槽单元场地,即具有被组装的碱性电解槽单元的场地,例如其可以至少部分地被拆卸。
13、应当理解,碱性电解槽单元的电池堆中的电解槽电池通常包括由一个电解槽膜隔开的两个电解槽电极(阳极和阴极)。在使用中,在组装碱性电解槽单元之后,向电解槽电池提供液态碱性电解质溶液(简称为碱性电解质)以实现水电解。在碱性电解槽单元的操作期间,借助于oh阴离子在阳极处产生氧气(和水),并且借助于所供应的电子在阴极处产生氢气(和oh阴离子)。碱性电解质和/或水可以被连续地供应给碱性电解槽单元。oh阴离子经由电解槽膜从阴极被运输到阳极。碱性电解槽单元的每个电池堆通常包括多个这种电解槽电池。因此,组装通常包括:对于每个被组装的碱性电解槽单元,借助于至少一个机器人的工具和操纵器将多个电解槽电池布置到电池堆中。
14、应当注意,当陈述多个机器人执行被包括在控制器中的组装指令时,多个机器人中的每一个机器人通过至少响应于这种组装指令操作可移动工具和操纵器来实施组装指令。
15、根据至少一个示例实施例,碱性电解槽单元中的电池堆中的电解槽电池中的电解槽电极的表面面积在0.5至3m2之间。
16、根据至少一个示例实施例,在拆卸期间,借助于至少一个机器人的工具和操纵器移除至少一个碱性电解槽单元部件通常包括借助于至少一个机器人的工具和操纵器从电池堆移除电解槽电池,和/或移除电解槽电极或电解槽膜。
17、根据至少一个示例实施例,碱性电解槽单元部件还包括端板,其中组装还包括:对于每个被组装的碱性电解槽单元,将端板布置为第一端板和第二端板,其中电池堆被布置在第一端板与第二端板之间。
18、由此,为电池堆和碱性电解槽单元提供机械支撑。端板可以被称为基板或负载载体板。因此,第一端板和第二端板形成用于相关联的碱性电解槽单元的电池堆的主要载体结构。通常,第一端板和第二端板与电池堆的任何电解槽电极不同。对于每个被组装的碱性电解槽单元,组装可以包括借助于至少一个机器人的工具和操纵器将第一端板布置在第一电池堆端或预期的第一电池堆端处,以及在将多个电解槽电极和多个电解槽膜布置在形成电池堆的电解槽电池中之后,借助于至少一个机器人的工具和操纵器将第二端板布置在第二电池堆端处。根据至少一个示例实施例,碱性电解槽单元部件还包括中间支撑板,其中组装还包括:对于每个被组装的碱性电解槽单元,在第一端板与第二端板之间布置至少一个中间支撑板,其中中间支撑板包围被布置在第一端板与第二端板之间的电池堆。
19、根据至少一个示例实施例,碱性电解槽单元部件还包括连接杆,其中组装还包括:对于每个被组装的碱性电解槽单元,布置至少一个连接杆以从第一端板延伸到第二端板以将电解槽电池压缩在电池堆中。
20、由此,为电池堆和碱性电解槽单元提供进一步的机械支撑。连接杆可以例如借助于螺母或螺钉螺母而被附接到第一端板和第二端板中的每一个端板。对于每个被组装的碱性电解槽单元,组装可以包括布置至少一个连接杆以借助于至少一个机器人的工具和操纵器从第一端板延伸到第二端板。
21、根据至少一个示例实施例,碱性电解槽单元部件还包括管道,其中组装还包括:对于每个被组装的碱性电解槽单元,布置管道以从电池堆的电解槽电池运输所产生的气体。
22、由此,提供了一种布置管道的有效方法。因此,管道被组装成与每个碱性电解槽单元的电池堆流体接触,并且被配置为从电解槽电池运输所产生的气体。例如,至少两个碱性电解槽单元可以被配置为将所产生的气体提供给相同的管道。管道可以包括用于处理所产生的氢气的第一管道系统和用于处理所产生的氧气的第二管道系统,第二管道系统与第一管道系统分离并且不同。根据至少一个示例实施例,管道还被配置为将碱性电解质(或其对应的溶液)和/或水运输到(多个)相关联的碱性电解槽单元和从(多个)相关联的碱性电解槽单元运输碱性电解质(或其对应的溶液)和/或水。因此,管道可以包括用于处理碱性电解质和/或水的第三管道系统。通常,碱性电解质和/或水在(多个)电池堆之外和之内再循环。对于每个被组装的碱性电解槽单元,组装可以包括布置管道以借助于至少一个机器人的工具和操纵器从电池堆延伸以从电解槽电池运输所产生的气体。管道通常包括适当的阀门和泵。因此,组装还可以包括安装和/或操作这种阀门和泵。
23、根据至少一个示例实施例,碱性电解槽单元部件还包括电线,其中组装还包括:对于每个被组装的碱性电解槽单元,布置电线以向碱性电解槽单元的至少一部分供应电力或电子。碱性电解槽单元部件还可以包括断路器、隔离开关和接地设备。
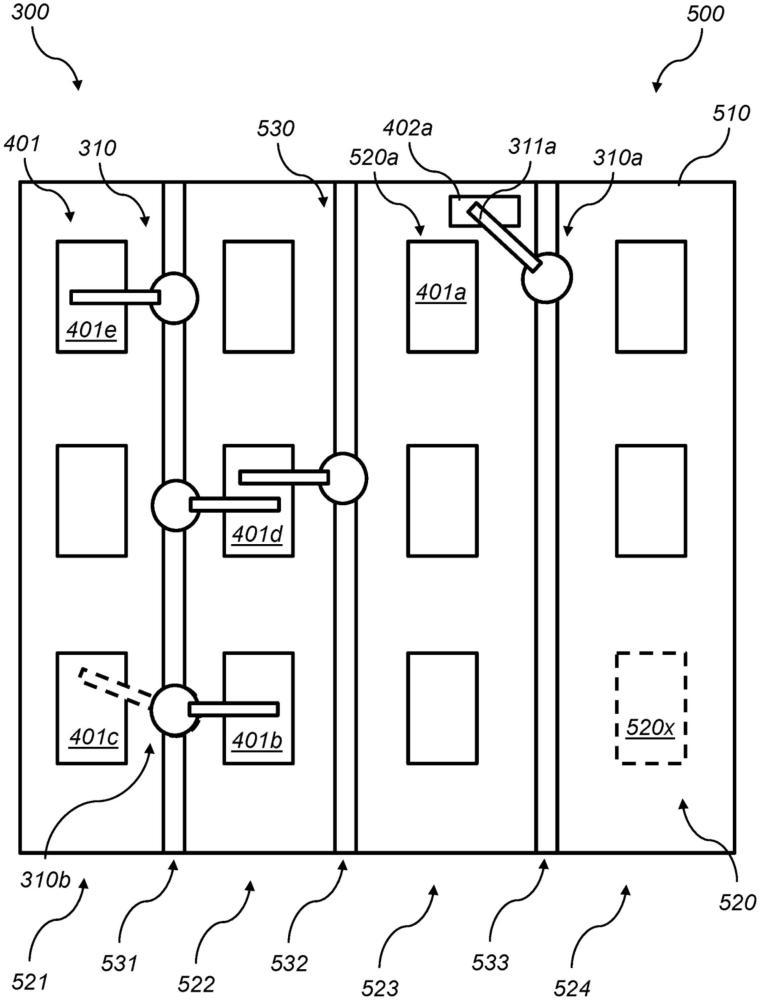
24、根据至少一个示例实施例,该方法还包括在多个行中提供多个电解槽单元场地,其中两个相邻的行由行空间隔开。
25、由此,行空间可以被保持最小,因为只有被配置为对碱性电解槽单元操作的机器人才需要被适配在两个相邻行之间。例如,行空间与碱性电解槽单元的宽度相同。根据至少一个示例实施例,行空间小于碱性电解槽单元宽度的两倍。碱性电解槽单元的宽度通常被定义为垂直于碱性电解槽单元的中心轴线的水平面中的距离。根据至少一个示例实施例,行空间在1m和5m之间,例如在1.5m和3m之间。例如,作为本发明的示例机器人,具有处理能力为250kg的abb的irb 660机器人需要大约1.5m的行空间,以便能够对两个相邻行中的碱性电解槽单元进行操作。根据至少一个示例实施例,行空间被调整成使得在两个相邻行之间操作的机器人可以操作(组装和/或拆卸)两个相邻行中的碱性电解槽单元。通常,这可以在不改变机器人的位置的情况下进行。对于引导系统是轨道系统的实施例,两个相邻行通常由轨道系统的轨道部分隔开。因此,多个机器人可以沿着两个相邻行之间的轨道部分移动,并且还可以移动到将另外两个相邻行隔开的另一个轨道部分。
26、根据至少一个示例实施例,第一机器人被定位在第一行和第二行之间,其中组装包括由第一机器人组装第一行中的第一碱性电解槽单元,以及组装第二行中的第二碱性电解槽单元。
27、也就是说,第一机器人被配置为组装第一行中的至少第一碱性电解槽单元,并且还组装第二行中的至少第二碱性电解槽单元。第一行和第二行是相邻的行。也就是说,机器人可以简单地在第一位置与第二位置之间旋转,通常为180度,在第一位置,机器人对第一行中的第一碱性电解槽进行操作,在第二位置,机器人对第二行中的第二碱性电解槽进行操作。
28、根据至少一个示例实施例,组装包括:对于每个机器人,将操纵器移动到碱性电解槽单元部件的本地存储位置,使用工具拾取碱性电解槽单元部件,在工具保持拾取的碱性电解槽单元部件的情况下将操纵器移动到相关联的电解槽单元场地的安装位置,为相关联的碱性电解槽单元组装碱性电解槽单元部件。
29、由此,提供了一种使用至少一个机器人在相关联的电解槽单元场地处组装特定的碱性电解槽单元的有效方法。例如,对于第一碱性电解槽单元,本地存储位置是用于至少第一碱性电解槽单元的碱性电解槽单元部件的第一本地存储位置。
30、根据至少一个示例实施例,对于每个机器人,拆卸包括将操纵器移动到相关联的碱性电解槽单元,使用工具拾取碱性电解槽单元部件,在工具保持拾取的碱性电解槽单元部件的情况下将操纵器移动到碱性电解槽单元部件的本地存储位置,在碱性电解槽单元部件的本地存储位置处释放碱性电解槽单元部件。
31、由此,提供了一种通过使用至少一个机器人在相关联的电解槽单元场地处拆卸特定的碱性电解槽单元的有效方法。拆卸可以例如被包括在对特定的碱性电解槽单元进行维护的操作中。例如,对于第二碱性电解槽单元,来自第二碱性电解槽单元的(移除或拆卸的)碱性电解槽单元部件的本地存储位置可以与上面描述的第一本地存储位置相同或不同。
32、根据至少一个示例实施例,该方法还包括提供气体传感器,该气体传感器被配置为检测来自碱性电解槽单元的任何泄漏气体。
33、因此,提供了一种用于检测泄漏气体的有效装置。气体传感器通常被配置为检测氢气和/或氧气。气体传感器可以例如被包括在工业机器人系统的至少一个机器人中。优选地,工业机器人系统的每个机器人都包括这种气体传感器。
34、根据至少一个示例实施例,该方法还包括:
35、通过控制器用主机器人功能性操作多个机器人中的第一机器人,该主机器人功能性包括对操纵器运动的控制,
36、通过控制器用主机器人功能性操作多个机器人中的第二机器人,使得通过第一操纵器和第二操纵器的协作运动来操作第一机器人和第二机器人,以协作地实行特定的碱性电解槽单元的组装和/或拆卸。
37、由此,至少两个机器人可以协作组装和/或拆卸特定的碱性电解槽单元。由此,工业机器人系统形成多机器人运动系统。
38、根据至少一个示例实施例,该方法还包括:
39、通过第一操纵器和第二操纵器的同步运动来操作第一机器人和第二机器人。
40、由此,至少两个机器人可以以同步运动进行协作用于组装和/或拆卸特定的碱性电解槽单元。
41、应当理解,工业机器人系统的控制器可以包括针对机器人中的每一个机器人的主控制器。每个主控制器可以例如被集成到其对应的机器人中。控制器还可以包括次级控制器,诸如单元控制器或系统控制器。优选地,至少主机器人功能性(诸如操纵器运动的控制)被包括在主控制器中。机器人的任何其它可能的功能性和/或过程(例如协作地实行组装和/或拆卸的过程,例如通过同步运动)可以优选地被分配给次级控制器。(多个)控制器(主控制器和/或次级控制器)通常包括过程软件和硬件资源以实行机器人功能性。过程软件和硬件资源可以例如由(多个)控制器中的计算机和逻辑单元体现。
42、根据至少一个示例实施例,该方法还包括将碱性电解槽单元部件运输到多个电解槽单元场地或从多个电解槽单元场地运输碱性电解槽单元部件。
43、由此,提供了一种将碱性电解槽单元部件提供给多个电解槽单元场地的有效方法。例如,碱性电解槽单元部件被运输到本地存储位置和/或从本地存储位置运输碱性电解槽单元部件,如前所述。例如,碱性电解槽单元部件例如由多个机器人在轨道系统上运输。
44、根据至少一个示例实施例,受控室内环境是iec/en 60079-10、iec 60079-10-1、iec 60079-10-2或iecex分类的区域。
45、也就是说,受控室内环境可能对人员来说是危险的,甚至是危害的。通常,氢气及其任何泄漏的风险是主要关注点。然而,还应考虑产生高磁场的非常高的直流电流。例如,受控室内环境被分类为危害区域区间1或区间21atex、iecex。
46、根据至少一个示例实施例,例如通过用于安装在危害区域区间1或区间21atex、iecex中的防爆ex i/ex p/ex c,多个机器人被分类为在分类区域中操作。
47、根据至少一个示例实施例,受控室内环境是洁净室。洁净室是工程空间,其维持非常低的空气中微粒的浓度。通常,洁净室被很好地隔离、很好地控制污染并且被主动清洁。洁净室可以例如被配置为将灰尘、空气中的生物和/或蒸发颗粒与周围环境相比(例如与洁净室的外部相比)保持在较低的水平。
48、洁净室可以例如被配置为实现通过预定分子测量处每立方米的颗粒的数目来量化的清洁度水平。例如,洁净室具有对应于iso 14644-1 1级、2级、3级、4级、5级、6级、7级或8级的清洁度水平。例如,预定分子测量处的每立方米颗粒的数目对应于小于3520000个0.5μm以上的颗粒、或小于352000个0.5μm以上的颗粒、或小于35200个0.5μm以上的颗粒、或小于3520个0.5μm以上的颗粒、或小于352个0.5μm以上的颗粒、或小于35个0.5μm以上的颗粒。
49、根据至少一个示例实施例,在多个其它碱性电解槽单元正在制氢设施中操作的同时,在电解槽单元场地处实行通过多个机器人中的至少一个机器人拆卸个碱性电解槽单元中的至少一个碱性电解槽单元。因此,可以在制氢设施的操作期间实行(例如用于维护的)拆卸。
50、根据至少一个示例实施例,至少一个碱性电解槽单元部件包括负载支承表面,并且其中组装还包括:对于被组装的碱性电解槽单元的至少一个子部分,将负载支承表面布置在底部碱性电解槽单元与顶部碱性电解槽单元之间,使得顶部碱性电解槽单元被垂直布置在底部碱性电解槽单元上方并且由负载支承表面支撑。
51、由此,用于安装碱性电解槽单元的表面面积被更有效地使用。换句话说,通过使用相同量的表面面积来安装碱性电解槽单元,增加了制氢设施的容量。因此,通过该实施例,增加了每单位表面面积的碱性电解槽单元的容量。容量可以例如被定义为制氢容量。
52、应该理解,当陈述顶部碱性电解槽单元被垂直布置在底部碱性电解槽单元上方并且由负载支承表面支撑时,顶部碱性电解槽单元被布置在底部碱性电解槽单元的顶部上,其中负载支承表面被布置在底部碱性电解槽单元与顶部碱性电解槽单元之间。因此,被组装的碱性电解槽单元的子部分可以包括被布置在地表面上的碱性电解槽单元,即多个底部碱性电解槽单元。因此,每个底部碱性电解槽单元可以具有被布置在对应的底部碱性电解槽单元的顶部上的顶部碱性电解槽单元,其中负载支承表面被布置在底部碱性电解槽单元与顶部碱性电解槽单元之间。
53、根据本发明的第二方面,提供了一种用于组装和/或拆卸制氢设施的碱性电解槽单元的工业机器人系统。碱性电解槽单元包括碱性电解槽单元部件,该碱性电解槽单元部件至少包括多个电解槽电极和多个电解槽膜,并且制氢设施被容纳在具有受控室内环境的建筑物中。工业机器人系统包括:
54、控制器,该控制器具有机器人功能性,以及
55、多个机器人,每个机器人包括具有基座的操纵器和可借助于操纵器相对于基座围绕多个轴线移动的工具,多个机器人被配置为被运输到多个电解槽单元场地,
56、其中多个机器人被配置为通过执行被包括在控制器中的组装指令在电解槽单元场地处组装碱性电解槽单元,使得对于每个被组装的碱性电解槽单元,通过使用至少一个机器人的工具和操纵器将多个电解槽电极和多个电解槽膜布置在形成电池堆的电解槽电池中,和/或
57、其中多个机器人被配置为借助于工具和操纵器,通过执行被包括在控制器中的拆卸指令,在电解槽单元场地处拆卸碱性电解槽单元,使得对于每个被拆卸的碱性电解槽单元,通过使用至少一个机器人的工具和操纵器移除至少一个碱性电解槽单元部件。
58、至少参考工业机器人系统,本发明的第二方面的效果和特征与上述关于本发明的第一方面的效果和特征大体类似。关于本发明的第一方面提及的实施例与本发明的第二方面大体兼容,其中一些实施例在下面举例说明。
59、因此,并且根据至少一个示例实施例,例如通过用于安装在危害区域区间1或区间21atex、iecex中的防爆ex i/ex p/ex c,多个机器人被分类以在分类区域中操作。
60、根据本发明的第三方面,提供了一种制氢设施。制氢设施包括具有受控室内环境的建筑物,以及根据本发明的第二方面的工业机器人系统。
61、至少参考工业机器人系统,本发明的第三方面的效果和特征与上述关于本发明的第一方面和第二方面的效果和特征大体类似。关于本发明的第一方面和第二方面提及的实施例与本发明的第三方面大体兼容,其中一些实施例在下面举例说明。
62、特别地,并且根据至少一个示例实施例,受控室内环境是由iec/en 60079-10、iec60079-10-1、iec 60079-10-2或iecex分类的区域。也就是说,受控室内环境可能对人员来说是危险的,甚至是危害的。通常,氢气及其任何泄漏的风险是主要关注点。例如,受控室内环境被分类为危险区域区间1或区间21atex、iecex。
63、特别地,并且根据至少一个示例实施例,受控室内环境是洁净室。因此,制氢设施可以被配置为将室内环境提供为参考本发明的第一方面描述的洁净室。
64、根据至少一个示例实施例,适用于本发明的第二方面和第三方面,建筑物和/或工业机器人系统包括用于将多个机器人运输到多个电解槽单元场地的引导系统。根据至少一个示例实施例,引导系统是被容纳在建筑物中的轨道系统,其中多个机器人被配置为在轨道系统上被运输。因此,多个机器人被配置为在轨道系统上被运输到多个电解槽单元场地。例如,例如通过被分成不同的轨道部分,轨道系统被集成到建筑物的地板中。根据至少一个示例实施例,引导系统通过自主移动机器人功能性而被包括在工业机器人系统中。因此,多个机器人中的每一个机器人都是自主移动机器人(a mr),其被配置为通过定位信息在建筑物内部移动。
65、例如,单个碱性电解槽单元可能具有与几兆瓦的电力需求相对应的容量,通常每生产nm3 h2(标准立方米)需要4-5kwh的能量输入。例如,制氢设施可以包括在50到150个碱性电解槽单元之间,对应于1gw的电力需求。
66、本技术中提及的任何标准或资格均应基于本技术的优先权日有效的说明。在以下描述和附图中公开和讨论本发明的进一步的优点和特征。
本文地址:https://www.jishuxx.com/zhuanli/20240726/120964.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表