集成加速度传感器和磁传感器的封装结构及其封装方法与流程
- 国知局
- 2024-07-27 12:41:45
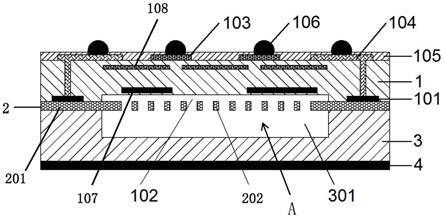
集成加速度传感器和磁传感器的封装结构及其封装方法【技术领域】1.本发明涉及集成式传感器技术领域,尤其涉一种集成加速度传感器和磁传感器的封装结构及其封装方法。背景技术:2.步入21世纪,人类全面进入信息时代,开启了万物互联的新征程,从一定意义上讲,也就进入了传感器时代。近些年来,伴随着智能手机市场的迅猛发展,作为手机应用中不可或缺的一部分,传感器的应用领域越来越广泛。然而,通常情况下,不同功能的传感器往往独立运用来实现其功能。一方面,不同功能的圆片单独流片再切割成单颗进行封装增加了产品的成本及加工周期;另一方面,不同传感器独立封装也占用较多的封装面积,和消费类电子轻,薄,小的发展方向不契合。3.因此,有必要提出一种集成度更高,封装体积更小的的六轴传感器满足市场需求。技术实现要素:4.本发明的目的之一在于提供一种集成加速度传感器和磁传感器的封装结构及其封装方法,其通过将加速度传感器和磁传感器集成到一个封装体内部,从而使产品的集成度更高,加工成本更低。5.根据本发明的一个方面,本发明提供一种集成加速度传感器和磁传感器的封装结构,其包括:第一半导体圆片,其正面设置有加速度传感器的驱动电路、第一金属焊盘和第一空腔;第二半导体圆片,其为所述加速度传感器的传感器结构,其包括位于芯片边缘的固定结构以及位于芯片中间的可移动结构,所述第二半导体圆片与所述第一半导体圆片的正面相键合,所述第二半导体圆片的正面与第一半导体圆片的正面相对,且所述第一半导体圆片的正面与所述第二半导体圆片的可移动结构的相对位置处设置有所述第一空腔;第三半导体圆片,其与所述第二半导体圆片的背面相键合,所述第三半导体圆片的正面与所述第二半导体圆片的背面相对,且所述第三半导体圆片的正面与所述第二半导体圆片的可移动结构的相对位置处设置有第二空腔,其中,所述第一空腔和第二空腔相对以形成腔体a,所述第二半导体圆片的可移动结构悬置于所述腔体a内。6.根据本发明的另一个方面,本发明提供一种集成加速度传感器和磁传感器的封装结构的封装方法,其包括:提供第一半导体圆片,所述第一半导体圆片的正面设置有加速度传感器的驱动电路、第一金属焊盘和第一空腔;提供第二半导体圆片,所述第二半导体圆片为所述加速度传感器的传感器结构,其包括位于芯片边缘的固定结构以及位于芯片中间的可移动结构;提供第三半导体圆片,所述第三半导体圆片的正面设置有第二空腔;将所述第一半导体圆片与所述第二半导体圆片的正面相键合,将第三半导体圆片与所述第二半导体圆片的背面相键合,键合后,所述第二半导体圆片的正面与第一半导体圆片的正面相对,且所述第一半导体圆片的正面的第一空腔与所述第二半导体圆片的可移动结构相对;键合后,所述第三半导体圆片的正面与所述第二半导体圆片的背面相对,且所述第三半导体圆片的正面的第二空腔与所述第二半导体圆片的可移动结构相对,其中,所述第一空腔和第二空腔相对以形成腔体a,所述第二半导体圆片的可移动结构悬置于所述腔体a内。7.与现有技术相比,本发明通过将加速度传感器和磁传感器集成到一个封装体内部,一方面可以缩短产品的加工周期,降低了加工成本;另一方面,通过晶圆级封装的方式,使产品的集成度更高,减小了封装体积,应用前景更广泛。【附图说明】8.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:9.图1为本发明在一个实施例中的集成加速度传感器和磁传感器的封装结构的纵向剖面示意图;10.图2为本发明在一个实施例中的集成加速度传感器和磁传感器的封装结构的封装方法的流程示意图;11.图3-图11为本发明在一个实施例中图2所示的各步骤对应的纵剖面图。【具体实施方式】12.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。13.此处所称的“一个实施例”或“实施例”是指可包含于本发明至少一个实现方式中的特定特征、结构或特性。在本说明书中不同地方出现的“在一个实施例中”并非均指同一个实施例,也不是单独的或选择性的与其他实施例互相排斥的实施例。除非特别说明,本文中的连接、相连、相接的表示电性连接的词均表示直接或间接电性相连。14.请参考图1所示,其为本发明在一个实施例中的集成加速度传感器和磁传感器的封装结构的纵向剖面示意图,其将加速度传感器和磁传感器集成到一个封装体内部。图1所示的集成加速度传感器和磁传感器的封装结构包括第一半导体圆片1、第二半导体圆片2、第三半导体圆片3和背胶层4。通过半导体圆片级封装后,会进行半导体圆片切割的步骤以形成多个相互独立的封装结构,即独立芯片。以半导体圆片切割前的角度来看,即半导体圆片级的角度来看,第一半导体圆片、第二半导体圆片和第三半导体圆片是三个独立的半导体圆片,以半导体圆片切割后的角度来看,即芯片级的角度来看,第一半导体圆片、第二半导体圆片和第三半导体圆片可以被理解为各个半导体圆片的晶片。15.所述第一半导体圆片1的正面设置有加速度传感器的驱动电路107、第一金属焊盘101和第一空腔102。在图1所示的具体实施例中,所述第一金属焊盘101位于所述第一空腔102的外侧,所述加速度传感器的驱动电路107与所述第一空腔102相对,且位于所述第一空腔102的底部的上方(或所述加速度传感器的驱动电路107比所述第一空腔102更靠近所述第一半导体圆片1的背面)。16.第二半导体圆片2为所述加速度传感器的sensor结构(即传感器结构),其包括位于芯片(或晶片)边缘的固定结构201以及位于芯片中间的可移动结构202。所述第二半导体圆片2与所述第一半导体圆片1的正面相键合,所述第二半导体圆片2的正面与第一半导体圆片1的正面相对(或相邻),且所述第一半导体圆片1的正面与所述第二半导体圆片2的可移动结构202的相对位置处设置有预先加工的第一空腔102(或所述第一半导体圆片1的正面的第一空腔102与所述第二半导体圆片2的可移动结构202相对)。17.第三半导体圆片3为加速度传感器的封装盖子(cap),其与所述第二半导体圆片2的背面相键合,所述第三半导体圆片3的正面与所述第二半导体圆片2的背面相对(或相邻),且所述第三半导体圆片3的正面与所述第二半导体圆片2的可移动结构202的相对位置处设置有预先加工的第二空腔301。18.也就是说,第一半导体圆片1和第三半导体圆片3分别与第二半导体圆片2的正反两面相接触,键合后第一半导体圆片1的第一空腔102和第三半导体圆片3的第二空腔301相对以形成腔体a,所述第二半导体圆片2的可移动结构202悬置于该腔体a内。在一个实施例中,空腔a内为真空。19.在图1所示的具体实施例中,所述第一半导体圆片1和第二半导体圆片2通过融熔键合的方式实现键合;与所述第一半导体圆片1键合后的第二半导体圆片2再与所述半导体圆片3通过金属键合的方式进行键合。20.在图1所示的实施例中,键合后的第一半导体圆片1的背面(即所述第一空腔102的对立面)设置有磁传感器及其驱动电路108、第二金属焊盘103。在图1所示的具体实施例中,所述第二金属焊盘103与所述磁传感器及其驱动电路108相对应且位于所述磁传感器及其驱动电路108的上方(或所述第二金属焊盘103比所述磁传感器及其驱动电路108远离所述第一半导体圆片1的正面)。21.在图1所示的实施例中,在设置有磁传感器及其驱动电路108、第二金属焊盘103的第一半导体圆片1的背面(即所述第一空腔102的对立面)设置有再布线层104,其由所述第一金属焊盘101引出并再分布到所述第一半导体圆片1的背面,其中,所述第一金属焊盘101的引出方式是在第一半导体圆片1上打孔并通过孔壁的布线金属引出,是通过通孔工艺实现的,具体的,通过硅通孔工艺(tsv),并通过再布线(rdl)层104及钝化层105保护,将第一半导体圆片1正面的第一金属焊盘101引到第一半导体圆片1的背面。在另一个实施例中,所述第一金属焊盘101的引出方式可以通过斜坡金属重布线工艺(或侧壁引线工艺)实现,具体的:第一金属焊盘101露出(或第一金属焊盘101未被所述第一半导体圆片1覆盖或遮挡);在所述第一半导体圆片1的背面和斜坡上形成钝化层和再布线层,沿着斜坡将第一金属焊盘101引到所述第一半导体圆片1的背面。22.在第一半导体圆片1的背面设置有焊球106,且所述焊球106设置于所述第二金属焊盘103和再布线层104上。第一金属焊盘101、第二金属焊盘103和焊球106均可作为信号触点。23.键合后的第一半导体圆片1、第二半导体圆片2和第三半导体圆片3依次层叠设置,通过背胶工艺,在键合后的第三半导体圆片3的背面形成背胶层4,并切割成单颗芯片形成最终的芯片级(csp)封装体。24.请参考图2所示,其为本发明在一个实施例中的集成加速度传感器和磁传感器的封装结构的封装方法的流程示意图;请参考图3-图11所示,其为本发明在一个实施例中图2所示的各步骤对应的纵剖面图。图2所示的集成加速度传感器和磁传感器的封装结构的封装方法包括如下步骤。25.步骤210、如图3所示,提供第一半导体圆片1,所述第一半导体圆片1的正面设置有加速度传感器的驱动电路107、第一金属焊盘101和第一空腔102。在图3所示的具体实施例中,所述第一金属焊盘101位于所述第一空腔102的外侧,所述加速度传感器的驱动电路107与所述第一空腔102相对,且位于所述第一空腔102的底部的上方(或所述加速度传感器的驱动电路107比所述第一空腔102更靠近所述第一半导体圆片1的背面)。26.步骤220、如图4所示,提供第二半导体圆片2,第二半导体圆片2为所述加速度传感器的sensor结构(即传感器结构),其包括位于芯片边缘的固定结构201以及位于芯片中间的可移动结构202。27.步骤230、如图5所示,提供第三半导体圆片3,所述第三半导体圆片3的正面设置有第二空腔301。28.步骤240、如图6所示,将所述第一半导体圆片1与所述第二半导体圆片2的正面相键合,键合后,所述第二半导体圆片2的正面与第一半导体圆片1的正面相对(或相邻),且所述第一半导体圆片1的正面的第一空腔102与所述第二半导体圆片2的可移动结构202相对。29.步骤250、如图7所示,将第三半导体圆片3与所述第二半导体圆片2的背面相键合,键合后,所述第三半导体圆片3的正面与所述第二半导体圆片2的背面相对(或相邻),且所述第三半导体圆片3的正面的第二空腔301与所述第二半导体圆片2的可移动结构202相对。30.也就是说,第一半导体圆片1和第三半导体圆片3分别与第二半导体圆片2的正反两面相接触,键合后第一半导体圆片1的第一空腔102和第三半导体圆片3的第二空腔301相对以形成腔体a,所述第二半导体圆片2的可移动结构202悬置于该腔体a内。在一个实施例中,所述腔体a内为真空。31.在图1所示的具体实施例中,所述第一半导体圆片1和第二半导体圆片2通过融熔键合的方式实现键合;与所述第一半导体圆片1键合后的第二半导体圆片2再与所述半导体圆片3通过金属键合的方式进行键合。32.步骤260、如图8所示,在键合后的第一半导体圆片1的背面(即所述第一空腔102的对立面)设置磁传感器及其驱动电路108、第二金属焊盘103。在图8所示的具体实施例中,所述第二金属焊盘103与所述磁传感器及其驱动电路108相对且位于所述磁传感器及其驱动电路108的上方(或所述第二金属焊盘103比所述磁传感器及其驱动电路108远离所述第一半导体圆片1的正面)。33.步骤270、如图9所示,在设置有磁传感器及其驱动电路108、第二金属焊盘103的第一半导体圆片1的背面(即所述第一空腔102的对立面)设置再布线层104,其由所述第一金属焊盘101引出并再分布到所述第一半导体圆片1的背面。34.在图9所示的具体实施例中,所述第一金属焊盘101的引出方式是在第一半导体圆片1上打孔并通过孔壁的布线金属引出,是通过通孔工艺实现的,具体的,通过硅通孔工艺(tsv),并通过再布线(rdl)层104及钝化层105保护,将第一半导体圆片1正面的第一金属焊盘101引到第一半导体圆片1的背面。在另一个实施例中,所述第一金属焊盘101的引出方式可以通过斜坡金属重布线工艺(或侧壁引线工艺)实现,具体的:第一金属焊盘101露出(或第一金属焊盘101未被所述第一半导体圆片1覆盖或遮挡);在所述第一半导体圆片1的背面和斜坡上形成钝化层和再布线层,沿着斜坡将第一金属焊盘101引到所述第一半导体圆片1的背面。35.步骤280、如图10所示,在第一半导体圆片1的背面设置有焊球106,且所述焊球106设置于所述第二金属焊盘103和再布线层104上。第一金属焊盘101、第二金属焊盘103和焊球106均可作为信号触点。36.步骤290,如图11所示,通过背胶工艺,在键合后的第三半导体圆片3的背面形成背胶层4,并切割成单颗芯片形成最终的芯片级(csp)封装体。37.综上所述,本发明通过将加速度传感器和磁传感器集成到一个封装体内部,一方面可以缩短产品的加工周期,降低了加工成本;另一方面,通过晶圆级封装的方式,使产品的集成度更高,减小了封装体积,应用前景更广泛。38.在本发明中,“连接”、“相连”、“连”、“接”等表示电性连接的词语,如无特别说明,则表示直接或间接的电性连接。39.以上所述仅为本发明的较佳实施方式,本发明的保护范围并不以上述实施方式为限,但凡本领域普通技术人员根据本发明揭示内容所作的等效修饰或变化,皆应纳入权利要求书中记载的保护范围内。
本文地址:https://www.jishuxx.com/zhuanli/20240726/123071.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表